„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Beata Organ
Analizowanie działania maszyn i urządzeń elektrycznych
725[01].O1.06
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
dr inż. Zdzisław Kobierski
mgr inż. Grzegorza Śmigielskiego
Opracowanie redakcyjne:
mgr inż. Danuta Pawełczyk
Konsultacja:
mgr inż. Gabriela Poloczek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 725[01].O1.06
„Analizowanie działania maszyn i urządzeń elektrycznych”, zawartego w modułowym
programie nauczania dla zawodu monter elektronik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Budowa, zasady działania maszyn elektrycznych
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
16
4.1.3. Ćwiczenia
16
4.1.4. Sprawdzian postępów
18
4.2. Zasady użytkowania i obsługiwania maszyn i urządzeń elektrycznych
19
4.2.1. Materiał nauczania
19
4.2.2. Pytania sprawdzające
22
4.2.3. Ćwiczenia
23
4.2.4. Sprawdzian postępów
23
4.3. Zasady działania i eksploatacji urządzeń grzewczych
24
4.3.1. Materiał nauczania
24
4.3.2. Pytania sprawdzające
31
4.3.3. Ćwiczenia
31
4.3.4. Sprawdzian postępów
32
4.4. Zasady działania i eksploatacji urządzeń z napędem elektrycznym
33
4.4.1. Materiał nauczania
33
4.4.2. Pytania sprawdzające
36
4.4.3. Ćwiczenia
37
4.4.4. Sprawdzian postępów
38
5. Sprawdzian osiągnięć
39
6. Literatura
44

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy z zakresu analizowania działania
maszyn i urządzeń elektrycznych.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – podstawowe wiadomości teoretyczne niezbędne do opanowania
treści jednostki modułowej,
−
zestaw pytań przydatny do sprawdzenia, czy już opanowałeś treści zawarte
w rozdziałach,
−
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć – przykładowy zestaw zadań i pytań. Pozytywny wynik
sprawdzianu potwierdzi, że dobrze pracowałeś podczas zajęć i że nabyłeś wiedzę
i umiejętności z zakresu tej jednostki modułowej,
−
literaturę uzupełniającą.
Z rozdziałem „Pytania sprawdzające” możesz zapoznać się:
−
przed przystąpieniem do rozdziału „Materiał nauczania” – poznając wymagania
wynikające z zawodu, a po przyswojeniu wskazanych treści, odpowiadając na te pytania
sprawdzisz stan swojej gotowości do wykonywania ćwiczeń,
−
po opanowaniu rozdziału „Materiał nauczania”, by sprawdzić stan swojej wiedzy, która
będzie Ci potrzebna do wykonywania ćwiczeń.
Kolejny etap to wykonywanie ćwiczeń, których celem jest uzupełnienie i utrwalenie
wiadomości z zakresu analizowania działania maszyn i urządzeń elektrycznych.
Wykonując ćwiczenia przedstawione w poradniku lub zaproponowane przez nauczyciela,
będziesz poznawał budowę, zasadę działania i eksploatację maszyn i urządzeń elektrycznych.
Po wykonaniu zaplanowanych ćwiczeń, sprawdź poziom swoich postępów wykonując
„Sprawdzian postępów”.
Odpowiedzi Nie wskazują luki w Twojej wiedzy, informują Cię również, jakich
zagadnień jeszcze dobrze nie poznałeś. Oznacza to także powrót do treści, które nie są
dostatecznie opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości będzie stanowiło
dla nauczyciela podstawę przeprowadzenia sprawdzianu poziomu przyswojonych wiadomości
i ukształtowanych umiejętności. W tym celu nauczyciel może posłużyć się zadaniami
testowymi.
W poradniku jest zamieszczony sprawdzian osiągnięć, który zawiera przykład takiego
testu oraz instrukcję, w której omówiono tok postępowania podczas przeprowadzania
sprawdzianu i przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach zakreśl
właściwe odpowiedzi spośród zaproponowanych.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów
bezpieczeństwa i higieny pracy oraz instrukcji przeciwpożarowych, wynikających z rodzaju
wykonywanych prac. Przepisy te poznasz podczas trwania nauki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
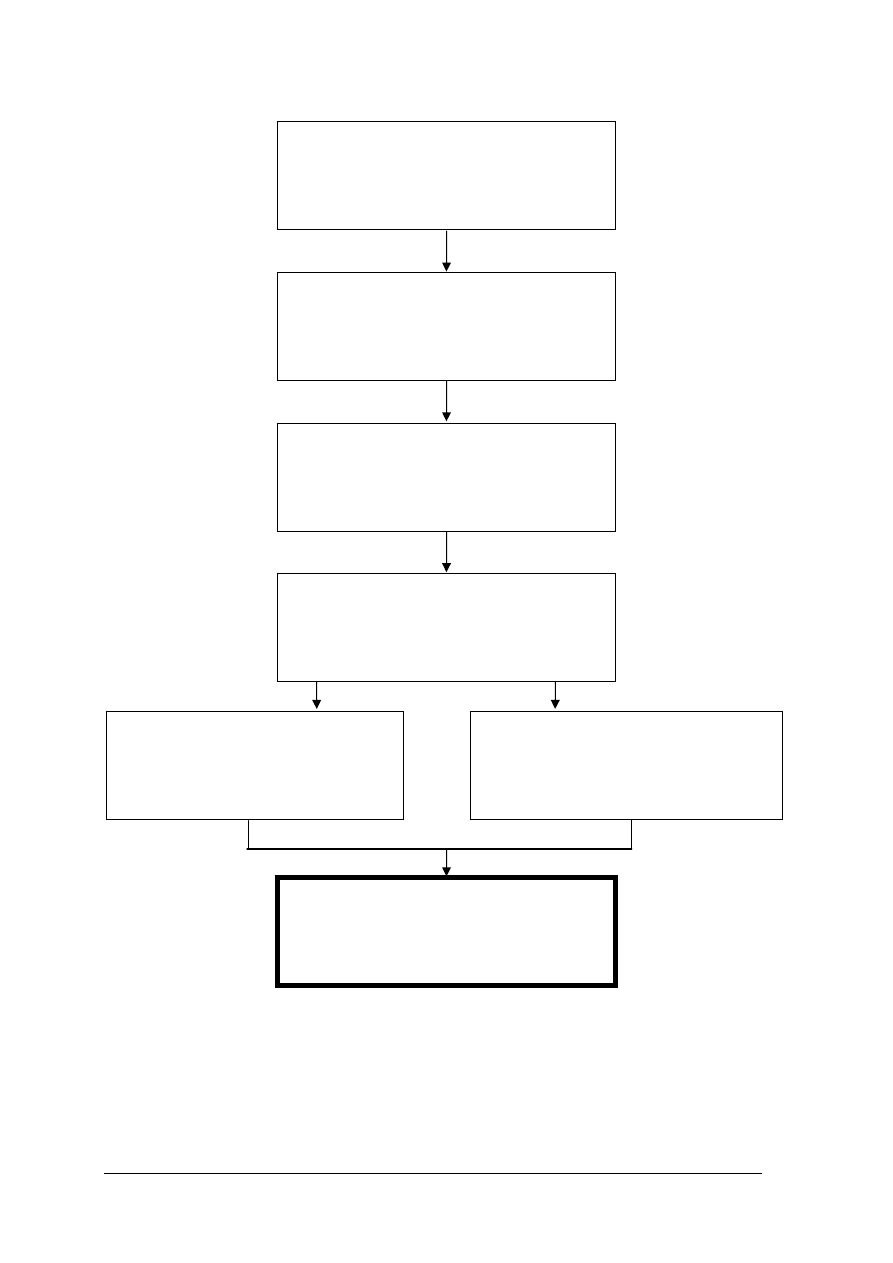
Schemat układu jednostek modułowych
725[01].O1
Pomiary parametrów i układów
elektronicznych
725[01].O1.06
Analizowanie działania maszyn
i urządzeń elektrycznych
725[01].O1.03
Badanie i pomiary obwodów prądu
przemiennego
725[01].O1.04
Badanie i pomiary elektronicznych
układów analogowych
725[01].O1.05
Badanie i pomiary elektronicznych
układów cyfrowych
725[01].O1.02
Badanie i pomiary obwodów prądu stałego
725[01].O1.01
Przygotowanie do bezpiecznej pracy

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej
powinieneś umieć:
−
stosować sprzęt oraz procedury w przypadku zagrożenia pożarowego,
−
rozróżniać i przeliczać podstawowe wielkości elektryczne,
−
rozpoznawać podstawowe elementy w obwodach prądu przemiennego i stałego na
podstawie ich symboli oraz wyglądu zewnętrznego,
−
wskazywać różnicę pomiędzy pracą odbiorników w obwodzie prądu przemiennego
i stałego,
−
rozróżniać pracę obwodu jednofazowego i trójfazowego prądu przemiennego,
−
stosować podstawowe przyrządy pomiarowe w obwodach prądu stałego i przemiennego,
−
dobierać przyrządy pomiarowe do pomiarów w obwodach prądu przemiennego i stałego,
−
wykonywać pomiary podstawowych wielkości elektrycznych w obwodach prądu
przemiennego i stałego,
−
wykonywać obliczenia mocy odbiorników jednofazowych i trójfazowych,
−
analizować i interpretować wyniki pomiarów oraz wyciągnąć praktyczne wnioski,
−
lokalizować usterki w prostych układach prądu przemiennego i stałego,
−
czytać proste schematy elektryczne,
−
współpracować w grupie,
−
korzystać z możliwie różnych źródeł informacji.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
rozróżnić funkcje oraz określić zastosowanie podstawowych maszyn i urządzeń
elektrycznych,
−
zinterpretować podstawowe zjawiska zachodzące w maszynach i urządzeniach
elektrycznych,
−
scharakteryzować podstawowe maszyny i urządzenia elektryczne,
−
rozpoznać na schematach ideowych podstawowe bloki funkcjonalne urządzeń
elektrycznych,
−
rozpoznać elementy i podzespoły maszyn i urządzeń na podstawie wyglądu,
−
zidentyfikować zaciski maszyn elektrycznych,
−
zinterpretować zapisy na tabliczkach znamionowych,
−
sporządzić wykaz przyrządów pomiarowych,
−
przygotować stanowisko pomiarowe,
−
zinterpretować wyniki pomiarów oraz sformułować wnioski praktyczne,
−
zademonstrować poprawne wykonanie pomiarów,
−
uporządkować stanowisko pomiarowe,
−
obsłużyć urządzenia na podstawie instrukcji,
−
bezpiecznie obsłużyć maszyny i urządzenia elektryczne.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Budowa i zasady działania maszyn elektrycznych
4.1.1. Materiał nauczania
Maszyna elektryczna jest to urządzenie elektromechaniczne służące do przetwarzania
energii. Cechą charakterystyczną maszyn elektrycznych jest to, że zachodzące w nim
przemiany energii odbywają się za pośrednictwem pola magnetycznego i przy udziale ruchu.
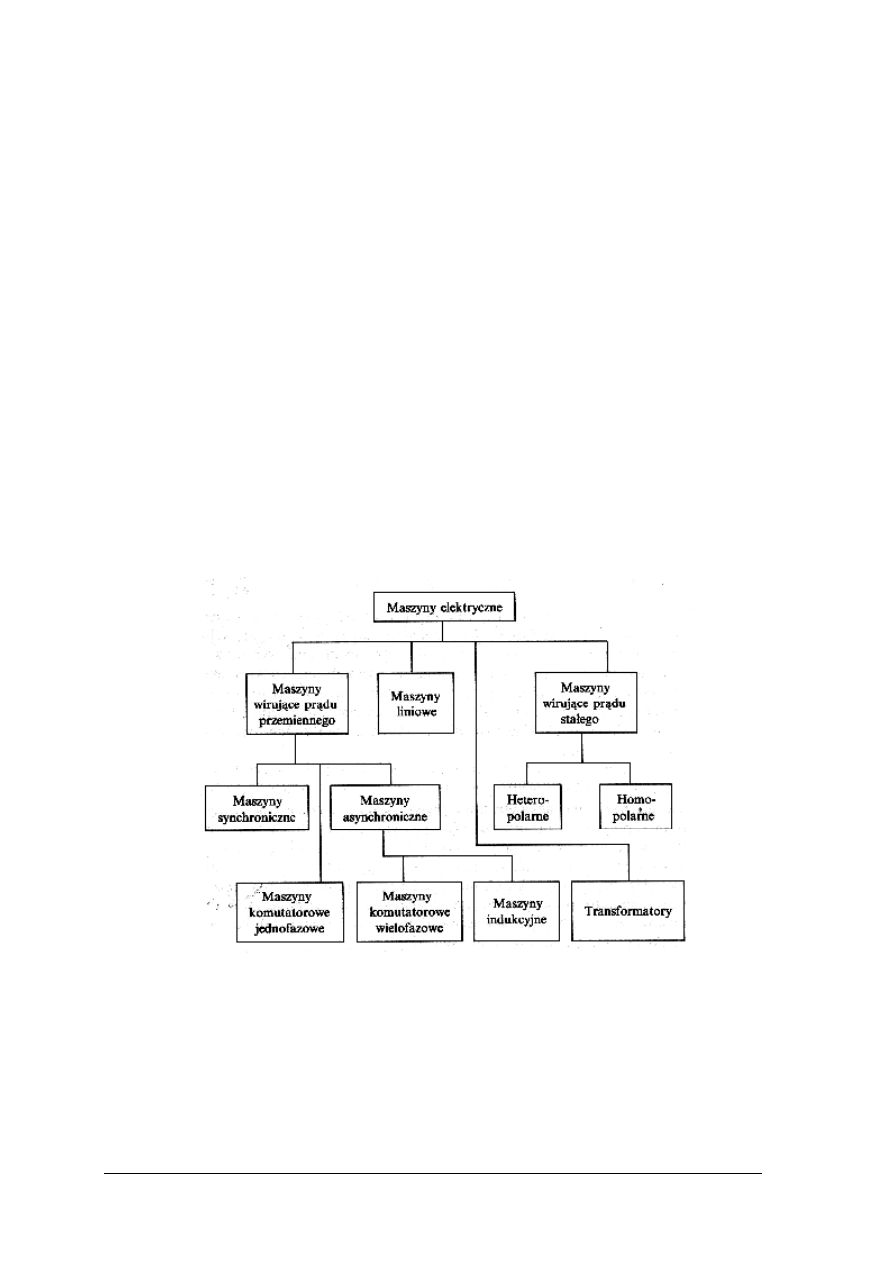
Ze względu na rodzaj energii przetwarzanej w maszynie elektrycznej rozróżniamy:
−
silniki – przetwarzają energię elektryczną na mechaniczną,
−
prądnice – przetwarzają energię mechaniczną na elektryczną,
−
przetwornice – przetwarzają energię elektryczną na energię elektryczną ale o innych
parametrach np. prądzie, napięciu i częstotliwości,
−
transformatory – zadaniem jest przetwarzanie (transformowanie) prądów i napięć
przemiennych na prądy i napięcia o niższej lub wyższej wartości.
Zarówno maszyny elektryczne, jak i transformatory są więc przetwornikami energii z tą
różnicą, że w transformatorze przemiany energetyczne zachodzą bez udziału ruchu,
a w maszynach elektrycznych przy udziale ruchu najczęściej obrotowego (maszyny wirujące),
a w niektórych przypadkach posuwistego (maszyny liniowe).
Rys. 1. Podział maszyn elektrycznych [5, s.26]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Zjawiska występujące w maszynach elektrycznych
Aby maszyna elektryczna mogła pracować, musi w niej być wytworzone pole
magnetyczne i muszą się w niej znajdować przewodniki wiodące prąd. Stąd w każdej
maszynie elektrycznej możemy wyodrębnić:
−
obwód magnetyczny – stanowi drogę dla strumienia magnetycznego,
−
obwód elektryczny – w którym indukuje się napięcie i płyną prądy.
W obwodach tych występuje jednocześnie wiele zjawisk, z których najistotniejsze dla
działania maszyn i transformatorów to:
−
zjawiska elektromagnetyczne,
−
zjawiska indukcji elektromagnetycznej,
−
zjawiska cieplne.
Powyższe zjawiska dokładnie zostały opisane w jednostce modułowej 725[01].O1.02
„Badanie i pomiary obwodów prądu stałego”
.
Budowa maszyn elektrycznych
Podstawowymi częściami każdej maszyny elektrycznej wirującej są: ruchomy wirnik
(rotor) i nieruchomy stojan (stator).
W skład stojana maszyny elektrycznej wchodzą:
−
jarzmo lub rdzeń – będące częścią nieruchomą obwodu magnetycznego maszyny,
kadłub – część konstrukcyjna maszyny,
−
tarcze łożyskowe i łożyska do osadzania wirnika i szczotkotrzymacze i szczotki.
W skład wirnika wchodzą:
−
rdzeń będący częścią ruchomą obwodu magnetycznego maszyny, a w nim uzwojenia:
−
wał, na którym umieszczony jest rdzeń,
−
pierścienie ślizgowe lub komutator, służące do połączenia uzwojenia wirnika
z obwodem zewnętrznym.
Maszyny indukcyjne – są to takie, w których napięcie do obwodu wirnika nie jest
doprowadzone z zewnątrz, lecz pojawia się w wyniku indukcji elektromagnetycznej.
Maszyny indukcyjne maja prostą budowę charakteryzują się dużą pewnością ruchową,
łatwością obsługi oraz niską ceną. Dzięki temu znalazły szerokie zastosowanie, najczęściej
jako silniki lub hamulce elektryczne, rzadziej jako prądnice.
Silniki indukcyjne ze względu na sposób zasilania dzielimy na:
−
maszyny indukcyjne jednofazowe,
−
maszyny indukcyjne dwufazowe,
−
maszyny indukcyjne trójfazowe.
Silnikami indukcyjnymi jednofazowymi nazywa się silniki indukcyjne z wirnikiem
jednoklatkowym zasilane z sieci jednofazowej niskiego napięcia i przeznaczone do
napędzania mechanizmów i urządzeń o nie regulowanej prędkości wirowania. Silniki
indukcyjne jednofazowe powszechnie stosuje się w urządzeniach gospodarstwa domowego.
W maszynach jednofazowych występują dwa uzwojenia przesunięte w przestrzeni o kąt Π/2.
Jedno z nich stanowi uzwojenie rozruchowe a drugie jest uzwojeniem głównym (roboczym).
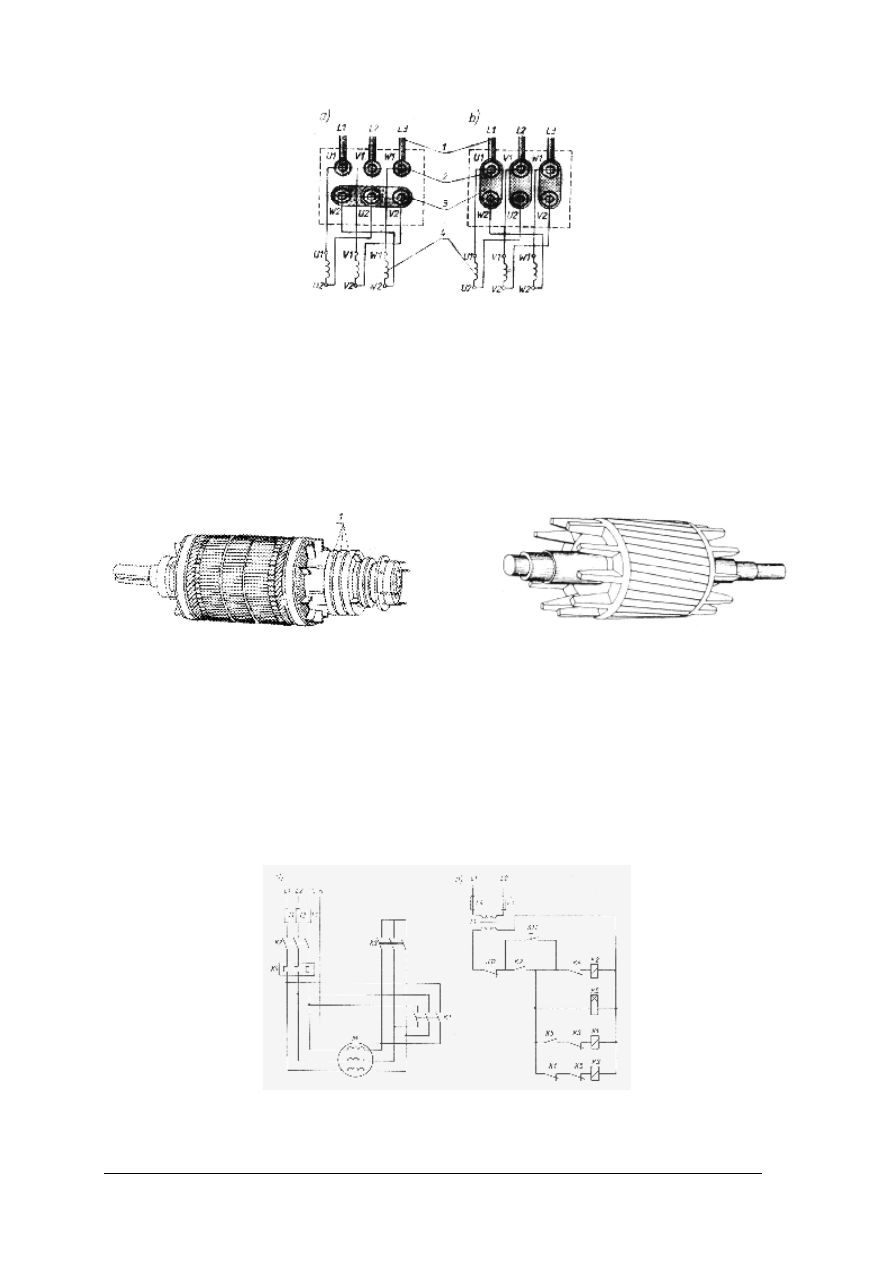
Silnik indukcyjny 3–fazowy. W stojanie nawinięte są trzy uzwojenia fazowe, które
w czasie pracy mogą być połączone w gwiazdę lub trójkąt.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Rys. 2. Połączenia uzwojeń stojana silnika indukcyjnego 3 – fazowego: a) połączony w gwiazdę, b) połączony
w trójkąt; 1 – przewody fazowe sieci zasilające, 2 – śruby zaciskowe, 3 – zwieracze metalowe,
5 – uzwojenie stojana [4, s.115]
Uzwojenia stojanów wykonuje się z drutu nawojowego izolowanego umieszczonego
w izolowanych żłobkach i dodatkowo impregnowanego. Uzwojenia wirnika mogą być
wykonane podobnie jak w stojanie z drutu nawojowego (silniki pierścieniowe) lub
nieżelaznych prętów wypełniających cały żłóbek połączonych po obu stronach pierścieniami
tworząc klatkę (silniki klatkowe lub zwarte).
a)
b)
Rys. 3. a) Wirnik silnika pierścieniowego, b) Wirnik silnika klatkowego [4, s.115, 117]
Rozruch silników klatkowych i pierścieniowych trwa od chwili przyłączenia obwodu
stojana do sieci zasilającej do chwili osiągnięcia przez wirnik nominalnej prędkości obrotowej.
Silniki klatkowe uruchamiamy przez bezpośrednie włączenie silnika do sieci (dotyczy
silników o mocy do 4,5 kW) lub za pomocą przełącznika gwiazda–trójkąt.
Przełącznik gwiazda–trójkąt stosuje się w celu zmniejszenia prądu rozruchu. Prądy pobierane
z sieci są 3 razy mniejsze niż przy rozruchu bezpośrednim. Wadą tego rozruch jest trzykrotne
zmniejszenie momentu rozruchowego silnika.
Rys. 4. Schemat układu sterowania silnika klatkowego samoczynnym przełącznikiem gwiazda –trójkąt:
a) obwód główny, b) obwód sterowania [4, s.120]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Uruchomienie silnika pierścieniowego odbywa się za pomocą rozrusznika włączonego
w obwód wirnika. Prąd pobierany przy rozruchu jest niewiele większy od znamionowego, zaś
moment rozruchowy jest duży. Jest to zaleta silników pierścieniowych.
Regulacja prędkości obrotowej w silnikach indukcyjnych
Prędkość obrotową silnika klatkowego można regulować przez:
−
zmianę liczby par biegunów – regulacja jest bardzo ekonomiczna tam, gdzie wymagana
liczba stopni prędkości nie przekracza 2–4; do takiej regulacji stosuje się silniki
wielobiegowe,
−
przez zmianę częstotliwości napięcia zasilającego – jest regulacją płynną w bardzo
szerokim zakresie (od 0÷3000 obr/min dla silników 2p = 4 i 0÷6000 obr/min dla silników
2p = 2) obecnie dzięki rozwojowi techniki tyrystorowej jest powszechnie stosowana.
Prędkość obrotową silnika pierścieniowego można regulować przez zmianę rezystancji
w obwodzie wirnika. Opornik włączony w obwód wirnika powinien być przystosowany do
pracy ciągłej. W miarę wzrostu rezystancji w obwodzie wirnika, prędkość obrotowa wirnika
przy stałej wartości momentu hamującego maleje. Wadą tego sposobu są znaczne straty
energii elektrycznej występujące w rezystorze regulacyjnym.
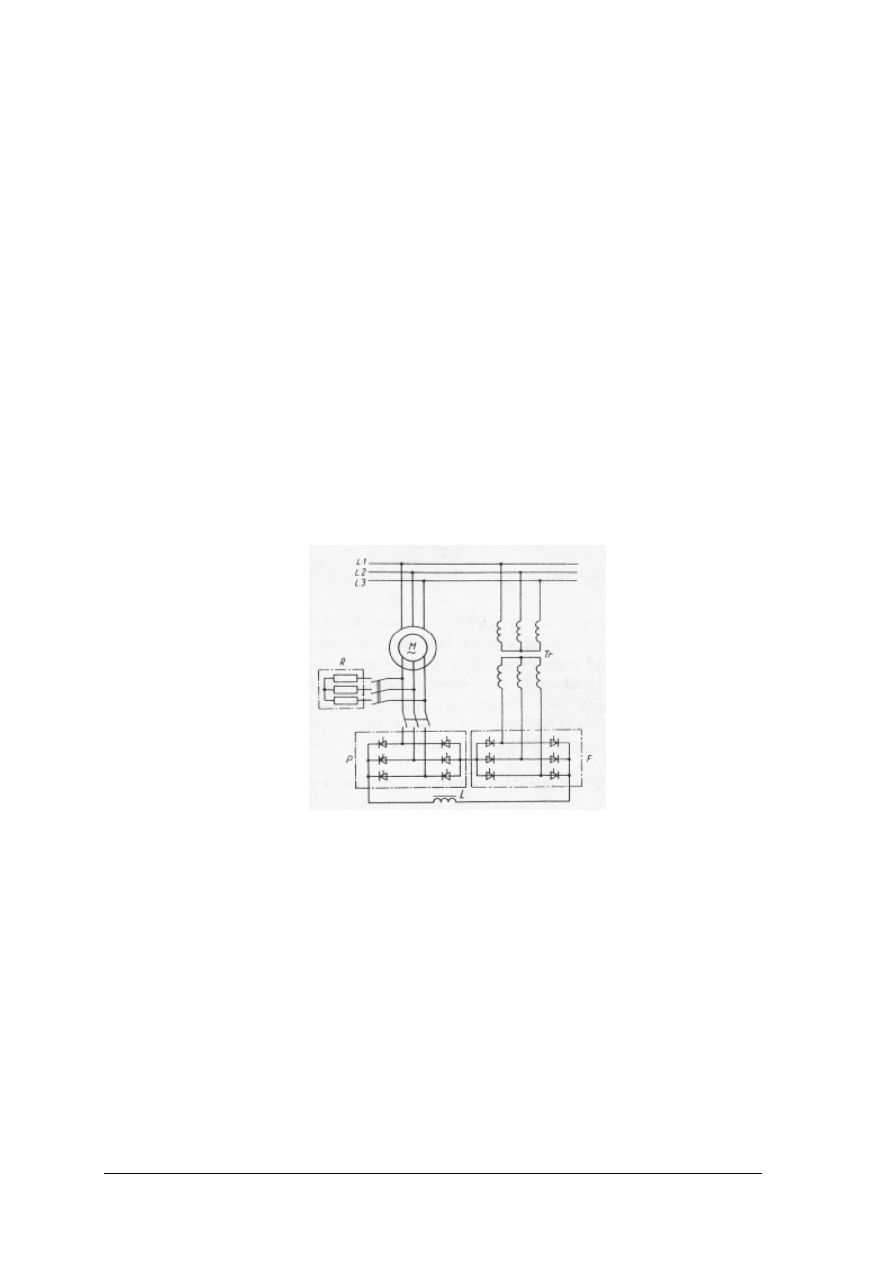
W nowoczesnych rozwiązaniach do regulacji prędkości obrotowej silników indukcyjnych
pierścieniowych są stosowane układy kaskadowe, które umożliwiają zwrot energii poślizgu
do sieci zasilającej.
Rys. 5. Regulacja prędkości obrotowej silnika indukcyjnego w układzie kaskadowym: P – prostownik tyrystorowy,
F – falownik, Tr – transformator, R – rozrusznik [ 4, s.126]
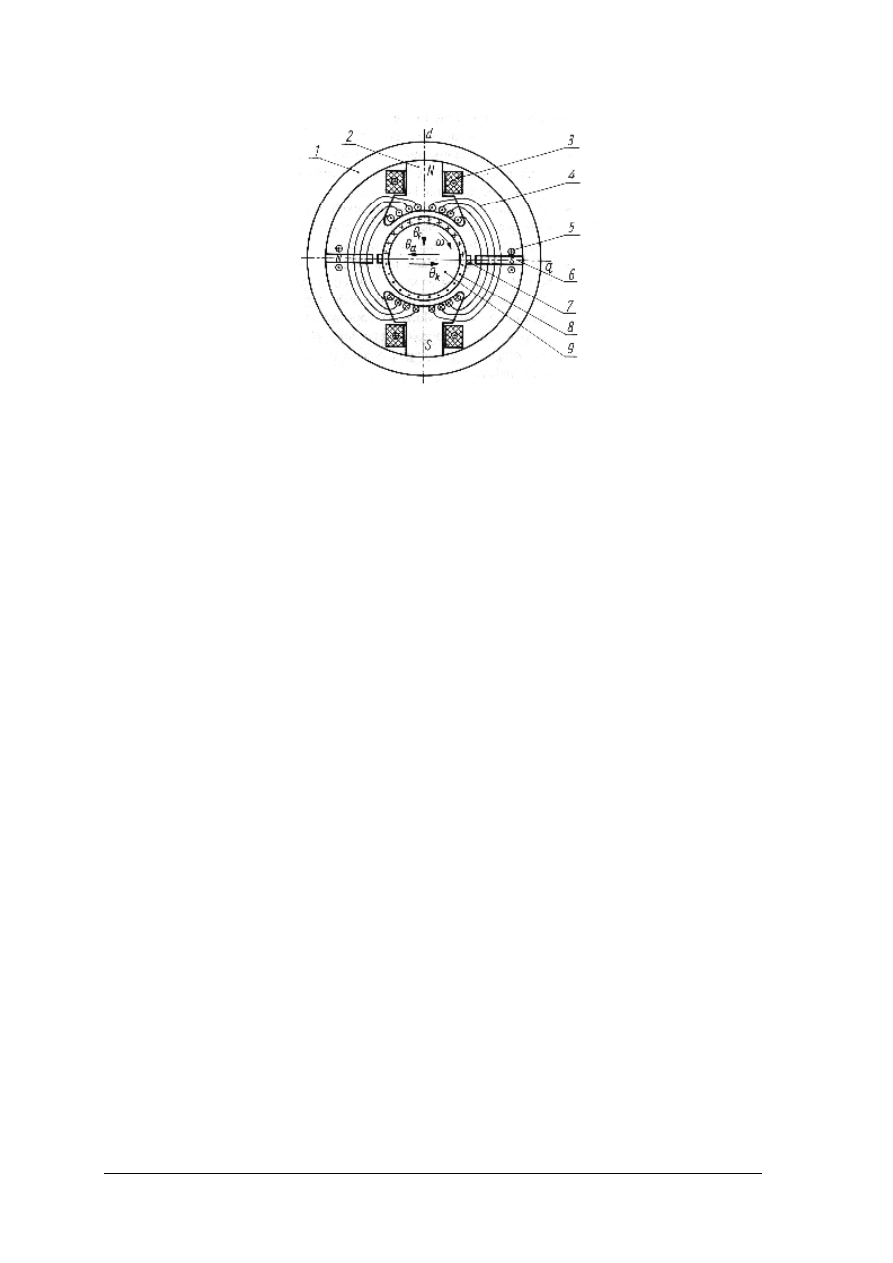
Budowa i zasada działania maszyny prądu stałego
W maszynach prądu stałego stojan i wirnik, z punktu widzenia spełnianych funkcji,
nazywany jest odpowiednio magneśnicą i twornikiem. W magneśnicy jest wytworzony
strumień magnetyczny, a w tworniku siła elektromotoryczna (w prądnicach) i moment
elektromagnetyczny (w silnikach).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Rys. 6. Rozmieszczenie uzwojeń i biegunów maszyny prądów stałego: 1 – jarzmo stojana, 2 – biegun główny,
3 – uzwojenie wzbudzenia, 4 – uzwojenie kompensacyjne, 5 – uzwojenie bieguna komutacyjnego,
6 – biegun komutacyjny, 7 – szczotki, 8 – uzwojenie twornika, 9 – twornik, d – oś podłużna maszyny,
q – oś poprzeczna maszyny [ 7, s.267]
Podstawowe znaczenie dla działania maszyn prądu stałego ma występowanie zjawiska
indukowania siły elektromotorycznej. W maszynie prądu stałego siła elektromotoryczna
indukuje się w przewodach umieszczonych w żłobkach wirnika i wraz z nim wirujących
w polu magnetycznym.
Uzwojenie, czyli zespół połączonych przewodów, w którym tworzy się siła
elektromotoryczna, nazywa się uzwojeniem twornika. Ponieważ uzwojenie to mieści się
w wirniku, cały wirnik nazywa się też twornikiem. W uzwojeniu twornika siła
elektromotoryczna indukuje się na skutek ruchu, dlatego nazywa się ją siłą elektromotoryczną
ruchu (rotacji).
E =
v
l
B
⋅
⋅
gdzie: E – siła elektromotoryczna, B – indukcja magnetyczna [T], l – długość uzwojenia
znajdującego się w polu magnetycznym [m], v – prędkość ruchu uzwojenia [m/s]
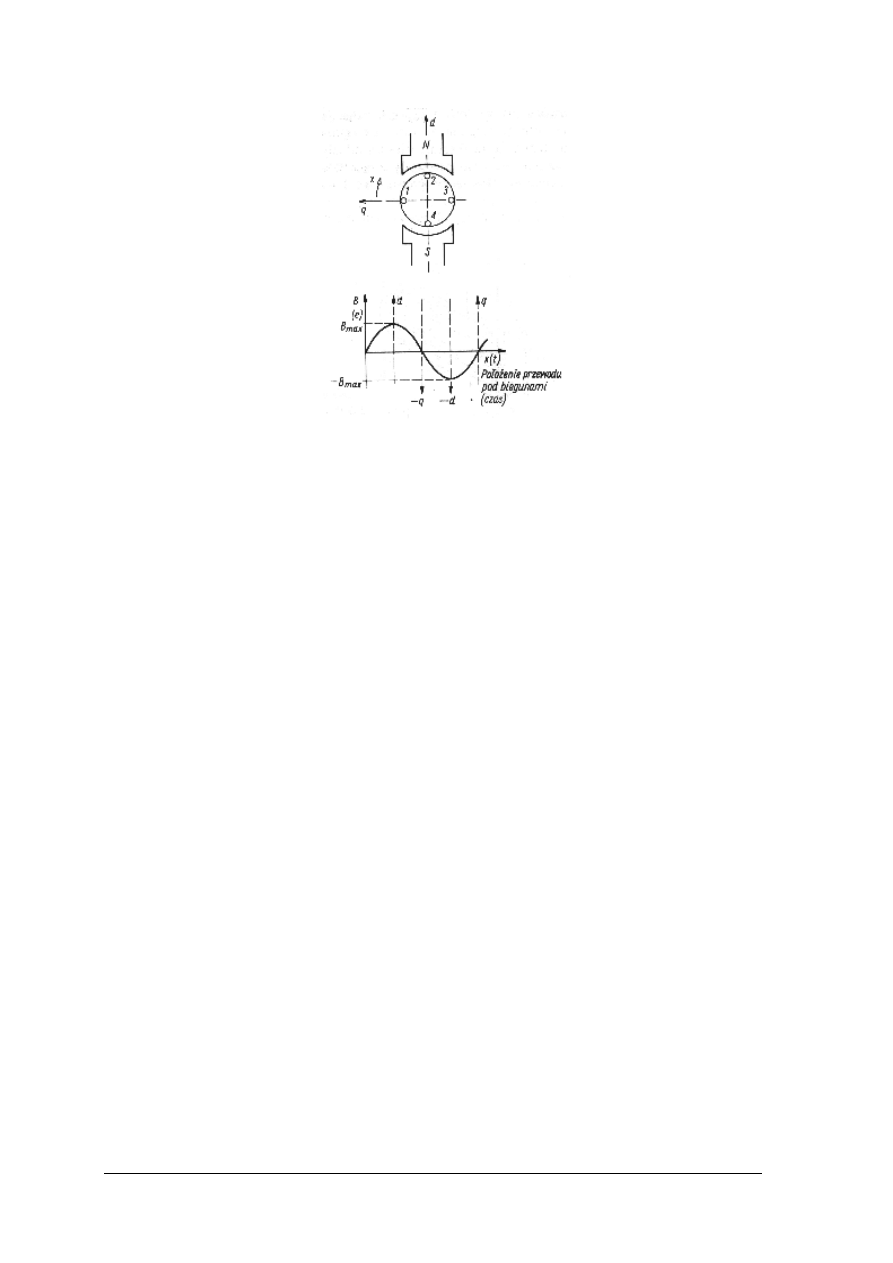
W maszynie prądu stałego indukcja magnetyczna na obwodzie wirnika jest stała, zatem
siła elektromotoryczna indukowana w przewodach wirnika zależy od miejsca, jakie przewód
zajmuje w szczelinie powietrznej. O wpływie położenia przewodu na wartość indukowanej
siły elektromotorycznej można się przekonać analizując rys. 8. Na rysunku pokazano dwa
bieguny (N i S) oraz cztery przewody (1, 2, 3, 4). Możemy zauważyć, że w osi bieguna
(nazywanej osią podłużną d) indukcja magnetyczna ma największa wartość, natomiast w osi
do niej prostopadłej (nazywanej osią poprzeczną q) indukcja jest równa zero. Tak więc
w przewodach 1 i 3 (znajdujących się w osi poprzecznej) siła elektromotoryczna nie indukuje
się, natomiast w przewodach 2 i 4 (leżących w osi podłużnej) ma ona największą wartość.
Ponieważ przewód 2 znajduje się pod działaniem bieguna N, a przewód 4 pod działaniem
bieguna S, zwroty sił elektromotorycznych indukowanych w tych przewodach są przeciwne.
Jeśli przyjmiemy, że w przestrzeni między osiami biegunów indukcja zmienia się
sinusoidalnie, to możemy stwierdzić, że przebieg w czasie indukowanej siły
elektromotorycznej jest również sinusoidalny.
Podobnie zmienia się również prąd przepływający przez uzwojenie twornika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Rys. 7. Rozkład indukcji magnetycznej w szczelinie powietrznej maszyny prądu stałego [5, s.45]
Straty energii i sprawność maszyn
Procesowi przemiany energii elektrycznej w mechaniczną lub odwrotnie towarzyszą
straty energii, które podzielić można na dwie grupy:
1. straty jałowe – niezależne od obciążenia, na które się składają:
−
straty mechaniczne ∆P
m
– wywołane przez tarcie w łożyskach tarcie szczotek
o komutator i na potrzeby wentylacji,
−
straty w uzwojeniu wzbudzenia,
−
straty w żelazie,
2. straty obciążeniowe – występujące tylko przy obciążeniu maszyny
∆P
obc
= R
tc
· I
2
t
– straty w rezystancji obwodu twornika.
Sprawność maszyny η określamy wzorami:
η =(P
1
– ΔP) / P
1
lub η =P
2
/ (P
2
+ ΔP)
gdzie: P
1
– moc pobierana przez maszynę; P
2
– moc oddawana przez maszynę,
ΔP – suma strat
Rodzaje maszyn prądu stałego
Zależnie od rodzaju wykonania uzwojenia wzbudzenia oraz sposobu jego zasilania, maszyny
prądu stałego dzieli się na:
−
obcowzbudne,
−
bocznikowe,
−
szeregowe,
−
szeregowo-bocznikowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
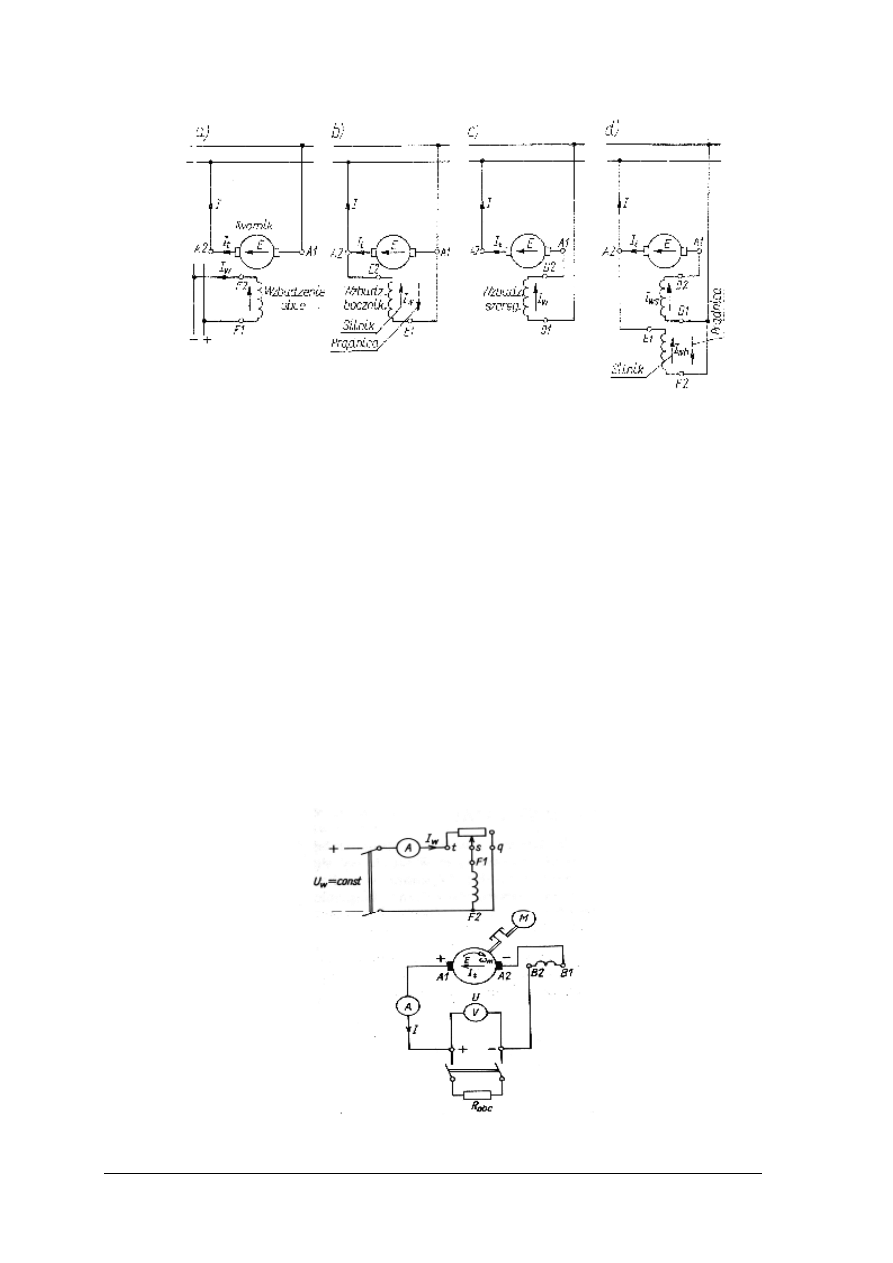
Rys. 8. Rodzaje maszyn prądu stałego: a) obcowzbudna, b) bocznikowa, c) szeregowa, d) szeregowo–
bocznikowa [8, s.351]
Nazwę maszyny określa sposób połączenia pomiędzy uzwojeniem twornika
i uzwojeniem wzbudzenia. Występują zatem maszyny (rys. 9):
−
obcowzbudne (nie ma elektrycznego połączenia pomiędzy uzwojeniem stojana
i wzbudzenia),
−
samowzbudne (bocznikowa, szeregowa i szeregowo-bocznikowa).
Prądnice prądu stałego
Prądnica obcowzbudna
Prądnica obcowzbudna jest maszyną, w której obwód wzbudzenia jest zasilany z obcego
źródła.
Na schemacie (rys.9a) można zauważyć, że prąd I
t
płynący przez uzwojenie twornika jest
równy prądowi płynącemu do odbiornika, czyli I
t
= I, jest to charakterystyczna cecha prądnic
obcowzbudnych.
Przebieg charakterystyki biegu jałowego jest inny przy zwiększaniu i zmniejszaniu prądu
– wpływa na to histereza obwodu magnetycznego. Do celów praktycznych posługujemy się
krzywą wypośrodkowaną (przerywaną).
Rys. 9. Prądnica obcowzbudna: a) schemat połączeń, b) charakterystyka biegu jałowego [8, s.354]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
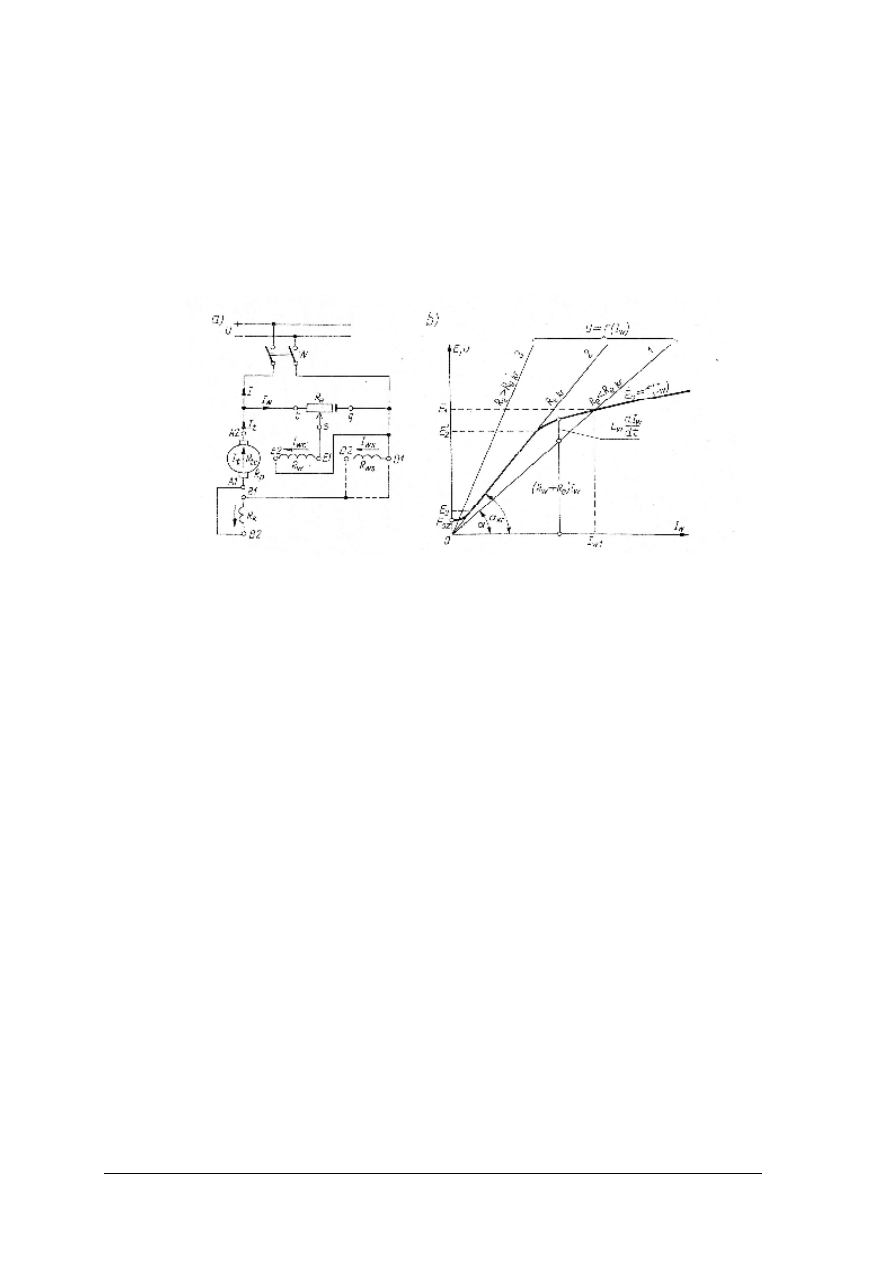
Prądnica bocznikowa i szeregowo-bocznikowa
Obie maszyny są maszynami samowzbudnymi. Pełny schemat ich połączeń podano na
rys.10 (maszyna bez uzwojenia D1D2 jest bocznikową, natomiast gdy ma to uzwojenie, jest
maszyną bocznikowo – szeregową). Prądnica może się wzbudzić, czyli uzyskać na swoich
zaciskach żądaną sem E tylko wówczas, gdy istnieje w niej magnetyzm szczątkowy
o strumieniu Ф
sz
. Siła elektromotoryczna E = E
sz
powoduje przepływ prądu I
w
i wzrost
strumienia Ф. Zwiększa się E, ponownie zwiększa się I
w
oraz ponownie zwiększa się E itd. do
osiągnięcia stanu ustalonego.
Rys. 10. Prądnica samowzbudna: a) schemat połączeń, b) charakterystyka biegu jałowego [8, s.353]
Rodzaje silników prądu stałego
Ze względu na sposób wzbudzenia pola magnetycznego silniki dzielą się na:
–
Silniki prądu stałego obcowzbudne – wymagają niezależnego źródła do zasilania
uzwojenia wzbudzającego są one stosowane głównie w napędach wymagających
regulacji prędkości w szerokim zakresie obrotów;
–
Silniki prądu stałego samowzbudne – silniki z elektromagnesem w stojanie mogą mieć
połączone uzwojenia stojana i wirnika szeregowo, równolegle (bocznikowo) lub
w sposób mieszany. Sposób podłączenia określa rodzaj silnika.
–
Silniki szeregowe – o uzwojeniu wzbudzenia w stojanie połączonym szeregowo
z uzwojeniem twornika. Charakteryzuje się dużą zależnością prędkości obrotowej od
obciążenie. Zmniejszanie obciążenie powoduje wzrost prędkości obrotowej (teoretycznie
do nieskończenie wielkiej) i grozi tzw. rozbieganiem, a w konsekwencji zniszczeniem
silnika. Jest to jego poważna wada. Dlatego tego typu silników nie wolno włączać bez
obciążenia. Stosowane są głównie w trakcji elektrycznej (napędy lokomotyw,
tramwajów, trolejbusów) i pojazdach mechanicznych (wózki akumulatorowe, rozruszniki
samochodów), w napędach dźwigów, wentylatorów itp.
Silnik szeregowy może być, jako jedyny silnik prądu stałego, zasilany również prądem
przemiennym. Silniki takie zwane są też silnikami uniwersalnymi. Możliwość ich różnego
zasilania wynika z faktu, że kierunek wirowania wirnika nie zależy od biegunowości
przyłożonego napięcia. W przypadku, gdy silnik ma być zasilany prądem stałym zarówno
stojan jak i wirnik wykonywane są z litego materiału. Natomiast przy zasilaniu prądem
przemiennym części te wykonuje się z pakietu blach zmniejszając tym samym straty cieplne
powstałe na skutek prądów wirowych. Ze względu na stosunkowo małe wymiary przy
stosunkowo dużej mocy silniki te znalazł duże zastosowane w urządzeniach wymagających
dużych prędkości obrotowych napędu, np. w odkurzaczach, elektronarzędziach, suszarkach,
sokowirówkach, mikserach, pralkach itp.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Silnik bocznikowy – o uzwojeniu wzbudzenia w stojanie przyłączonym równolegle
z uzwojeniem twornika. Charakteryzuje się małą podatnością na zmianę prędkości obrotowej
na skutek zmiany obciążenia. Stosowany głównie w napędach obrabiarek, pomp, dmuchaw,
kompresorów.
Silnik szeregowo-bocznikowy – o uzwojeniu wzbudzenia w stojanie połączonym
z uzwojeniem twornika w sposób mieszany (część szeregowo, a część równolegle).
Charakteryzuje się brakiem głównej wady silnika szeregowego – możliwości jego
rozbiegania – oraz jego zaletami – duży moment obrotowy i duża zależność prędkości
obrotowej od obciążenia. Stosowany jest zazwyczaj jako silniki dużych mocy, tam gdzie
występuje ciężki rozruch: do napędu walcarek, pras, dźwigów oraz w napędach okrętowych
mechanizmów pokładowych.
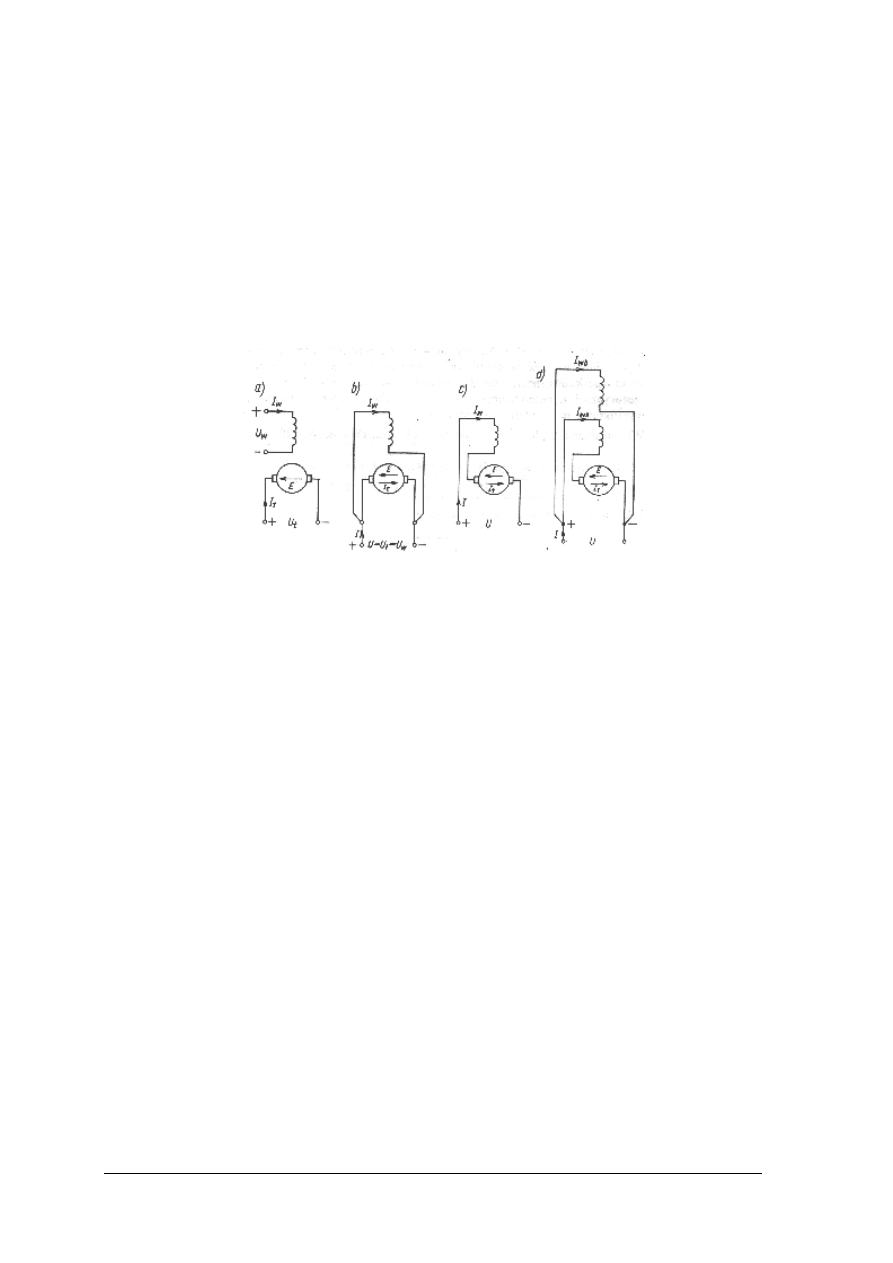
Rys. 11. Sposoby łączenia uzwojeń silników prądu stałego: a) obcowzbudnego, b) bocznikowego,
c) szeregowego, d) szeregowo – bocznikowego [5, s.104]
Rozruch silników prądu stałego jest możliwy przez:
−
zmianę napięcia twornika od 0 do U
n
przy zasilaniu obwodu wzbudzenia znamionowym
napięciem,
−
włączenie rezystora (rozrusznika) w szereg z uzwojeniem twornika.
Silniki wykonawcze
Silniki wykonawcze przetwarzają impulsy elektryczne na przesunięcia kątowe i liniowe.
Do silników wykonawczych doprowadza się dwa napięcia:
−
napięcie wzbudzenia, przyłączone na stałe, utrzymuje silnik w gotowości do
przetwarzania sygnały,
−
napięcie sterujące jest doprowadzone (do innego uzwojenia) tylko na czas
przetworzenia sygnału.
Jako silniki wykonawcze stosuje się:
−
silniki prądu stałego – obcowzbudne i skokowe (krokowe),
−
silniki prądu przemiennego – indukcyjne dwufazowe.
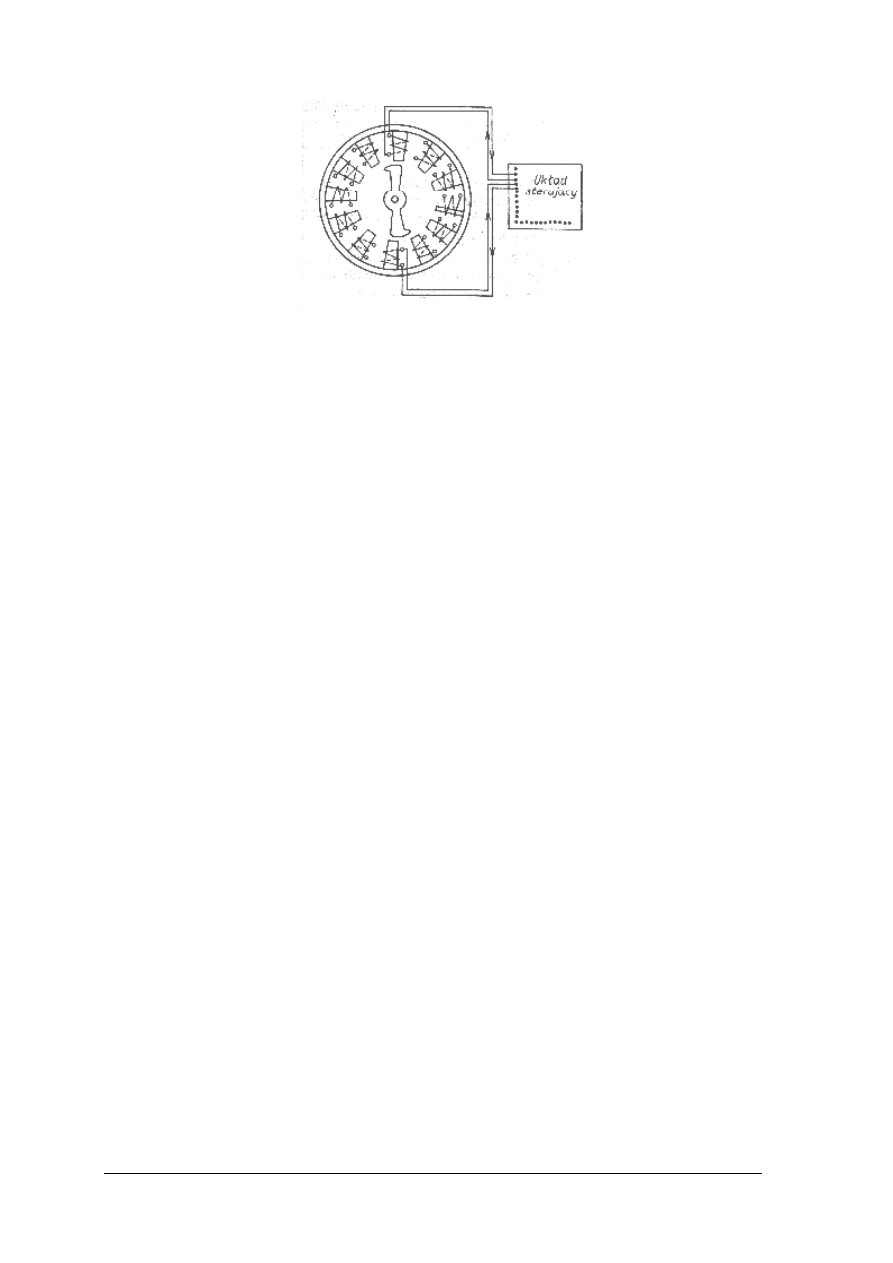
Silnik krokowy – silnik elektryczny, w którym impulsowe zasilanie prądem
elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje za
każdym razem ruch obrotowy o ściśle ustalonym kącie. Dzięki temu, kąt obrotu wirnika jest
ściśle zależny od liczby dostarczonych impulsów prądowych, a prędkość kątowa wirnika jest
dokładnie równa częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika
w jednym cyklu pracy silnika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. 12. Zasada działania silnika skokowego [7, s.279]
Kąt obrotu wirnika pod wpływem działania jednego impulsu może mieć różną wartość,
zależnie od budowy silnika – jest to zwykle wartość od kilku do kilkudziesięciu stopni.
Silniki krokowe, zależnie od przeznaczenia są przystosowane do wykonywania od ułamków
obrotu na sekundę do nawet kilku tysięcy obrotów na sekundę.
Są trzy podstawowe typy silników krokowych pod względem budowy:
−
silnik z magnesem trwałym,
−
silnik o zmiennej reluktancji,
−
silnik hybrydowy.
Silniki krokowe są stosowane wszędzie tam, gdzie kluczowe znaczenie ma możliwość
precyzyjnego sterowania ruchem:
−
w szeroko rozumianej automatyce – w mechanicznych urządzeniach regulacyjnych (np:
automatycznych zaworach),
−
w urządzeniach pomiarowych np. zegarach elektronicznych do przesuwania wskazówek,
−
w robotyce – do sterowania ruchem ramion robotów, kół w automatycznych wózkach
widłowych itp.,
−
w komputerach – np. w twardych dyskach, gdzie zadaniem silnika jest zapewnienie ruchu
głowicy odczytująco – zapisującej po prostej radialnej w stosunku do talerzy pokrytych
nośnikiem magnetycznym.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje maszyn elektrycznych?
2. Z jakich podstawowych elementów zbudowane są maszyny elektryczne?
3. Jakie znasz zjawiska występujące w maszynach elektrycznych?
4. W jaki sposób wytwarza się siłę elektromotoryczną w maszynach prądu stałego?
5. Jakie znasz metody rozruchu w silnikach indukcyjnych?
6. Jak dzielimy maszyny prądu stałego w zależności od sposobu połączeń uzwojeń
maszyny?
7. Jakie zastosowane mają silniki krokowe?
4.1.3. Ćwiczenia
Ćwiczenie 1
Silnik z wirnikiem tarczowym ma następujące dane znamionowe: 24 V; 2,2 A; 33 W;
3500 obr/min, cos
ϕ = 1. Ile wynosi jego sprawność i jaka jest wartość momentu obrotowego
silnika?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) skorzystać ze wzoru na sprawność,
2) obliczyć wartość momentu obrotowego silnika na wale.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia,
−
zeszyt, kalkulator, przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Silnik indukcyjny jednofazowy prądu zmiennego z fazą pomocniczą rezystancyjną ma
następujące dane znamionowe: P
N
= 550 W; U
N
= 230 V; f = 50 Hz I
N
= 4,2 A; n = 1380 obr/min;
cosφ = 0,73. Oblicz sprawność, poślizg oraz ile biegunów ma te silnik?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) skorzystać z wzoru na sprawność,
2) skorzystaj z wzoru na poślizg,
3) obliczyć sprawność i poślizg wyrażony w %.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia,
−
zeszyt, kalkulator, przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 3
Badanie silników elektrycznych małej mocy.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zastosować się do poleceń zawartych w instrukcji,
4) połączyć układ pomiarowy do badania silnika prądu stałego,
5) przeprowadzić badania zwracając szczególną uwagę na dokładność pomiarów (w razie
trudności skorzystać z pomocy nauczyciela),
6) sporządzić charakterystyki badanej maszyny na podstawie otrzymanych wyników
pomiarowych, zgodnie z instrukcją,
7) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
silnik prądu stałego małej mocy przystosowany do badania,
−
instrukcja stanowiskowa,
−
przyrządy pomiarowe, przewody łączeniowe,
−
przygotowany przez ucznia protokół pomiarowy, papier milimetrowy, przybory do pisania,
−
literatura wskazana przez nauczyciela.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) określić
urządzenia
gospodarstwa
domowego,
w
których
są
zainstalowane maszyny elektryczne?
¨
¨
2) określić zastosowania maszyn elektrycznych?
¨
¨
3) scharakteryzować rodzaje maszyn w zależności od zastosowania?
¨
¨
4) objaśnić, co to jest obwód elektryczny maszyny?
¨
¨
5) objaśnić, co to jest obwód magnetyczny maszyny?
¨
¨
6) objaśnić zjawiska fizyczne występujące w maszynach elektrycznych?
¨
¨
7) objaśnić, w jaki sposób mogą być wytwarzane pola magnetyczne
w maszynach elektrycznych?
¨
¨
8) określić, z jakich części składa się każda maszyna wirująca?
¨
¨
9) określić, gdzie stosowane są silniki krokowe?
¨
¨

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
4.2. Zasady użytkowania i obsługiwania maszyn i urządzeń
elektrycznych
4.2.1. Materiał nauczania
Użytkowaniem maszyny będziemy nazywać wykonywanie (realizowanie) przez
maszynę elektryczną wyznaczonych jej zadań. Użytkować maszynę elektryczną można tylko
wówczas, gdy jest ona w tzw. stanie zdatności, czyli gdy jest sprawna.
Obsługiwanie jest to wykonywanie na nie użytkowanej maszynie różnorodnych
czynności mających na celu utrzymanie maszyny w stanie zdatności. Obsługiwanie obejmuje
również czynności wykonywane na maszynie będącej w tzw. stanie niezdatności, to jest
w stanie, jaki powstaje w maszynie, która uległa uszkodzeniu. Do pojęcia obsługa zalicza się
również czynności naprawcze wykonywane na uszkodzonej maszynie, a nazywane odnową
stanu zdatności, czyli odtworzenie właściwości użytkowych maszyny.
Eksploatacja (pojęcie) obejmuje zarówno użytkowanie maszyny, jak też jej
obsługiwanie. Według Polskiej Normy – eksploatacją nazywa się zespół wszystkich działań
technicznych i organizacyjnych, mających na celu umożliwienie obiektowi wypełnienie
wymaganych funkcji, włącznie z koniecznym dostosowaniem do zmian warunków
zewnętrznych.
Każda maszyna może być eksploatowana tylko przez określony dla niej czas
eksploatacji. Czas eksploatacji maszyny liczy się od chwili rozpoczęcia (początku)
eksploatacji do chwili wycofania maszyny z eksploatacji, czyli do chwili jej likwidacji
(złomowanie).
Na czas eksploatacji maszyny składają się czasy:
−
transportowania,
−
przechowywania,
−
użytkowania (pracy),
−
obsługiwania,
−
oczekiwania na naprawy oraz naprawy.
Maszynę należy wycofać z eksploatacji (złomować) wówczas, gdy osiągnie ona tzw. stan
graniczny, czyli taki stan techniczny, przy którym dalsza eksploatacja nie jest możliwa lub
nie jest wskazana.
Niezawodność maszyny elektrycznej zależy nie tylko od jej konstrukcji i technologii
wykonania, ale w istotnym stopniu od warunków jej użytkowania i obsługiwania, czyli
warunków eksploatowania.
Do czynników oddziałujących na eksploatowaną maszynę należy wymienić:
−
wymuszania powodowane pracą urządzenia napędzającego w prądnicach lub urządzenia
napędzanego w silnikach,
−
wymuszania wywołane przez sieć elektroenergetyczną lub odbiorniki przyłączone do
prądnicy,
−
system zabezpieczeń i sterowania pracą maszyny,
−
czynniki zewnętrzne.
Ogólne warunki pracy maszyn elektrycznych
Maszyna elektryczna charakteryzuje się dużą trwałością i małą awaryjnością, jeśli jest
właściwie (prawidłowo) eksploatowana.
Prawidłowość doboru maszyny do urządzenia lub układu napędowego można ocenić na
podstawie pomiarów kontrolnych napięć, prądów, mocy, temperatury, itp.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Pomiary kontrolne wykorzystania maszyn większych i dużych mocy należy
przeprowadzać okresowo.
Podstawowym zadaniem służb obsługowo-konserwacyjnych w zakładach przemysłowych jest
w szczególności przeprowadzanie:
−
okresowych pomiarów i prób,
−
okresowych przeglądów maszyn oraz aparatury pomiarowo-kontrolnej i zabezpieczającej,
−
niezbędnych remontów,
−
stałych obserwacji maszyny oraz współpracujących z nią urządzeń.
Trwałość maszyn elektrycznych użytkowanych w urządzeniach gospodarstwa domowego
jest często skrócona na skutek nie przeprowadzenia czynności konserwacyjnych oraz nie
zwracania uwagi na warunki ich pracy.
Użytkowanie maszyn elektrycznych większych mocy, zwłaszcza w zakładach
przemysłowych, musi być zgodny ze szczegółowymi instrukcjami o eksploatacji.
W instrukcji powinny być podane:
−
czynności konieczne do wykonania przed uruchomieniem maszyny,
−
czynności konieczne do wykonania podczas uruchamiania i wyłączania maszyny,
−
niedomagania, przy których wystąpieniu maszynę należy można awaryjnie odłączyć od
sieci,
−
czynności wykonywane podczas awaryjnego odłączania maszyny.
Maszyny prądu przemiennego powinny być użytkowane przy napięciu sinusoidalnym
o częstotliwości wynoszącej w Europie 50 Hz, a np. w Japonii 60 Hz. Dopuszczalne są
niewielkie odchyłki od wartości znamionowej.
Obowiązujące normy określają również – wyznaczane na podstawie pomiarów–
największej wartości drgań, hałasów oraz zakłóceń radioelektrycznych, jakie mogą
wytworzyć maszyny elektryczne.
Podczas pracy maszyn powstają, jako produkt uboczny, drgania nazywane też
wibracjami.
Drgania, którym poddawany jest organizm ludzki, wywołują w nim objawy patologiczne
znane pod nazwą choroby wibracyjnej, która może objawiać się zakłóceniami zmysłu
równowagi, wzroku, trwałym uszkodzeniem organów wewnętrznych itp. Drganiom można
przeciwdziałać tylko wtedy, gdy się zna przyczyny ich powstawania.
Zakłócenia radioelektryczne to napięcia, prądy lub pola elektromagnetyczne wielkiej
częstotliwości utrudniające lub uniemożliwiające odbiór radiowy lub telewizyjny.
Hałasem (szmerem) nazywa się zbiór niemile brzmiących tonów o różnej częstotliwości,
intensywności i czasie trwania.
Każda maszyna elektryczna powinna mieć co najmniej jeden zacisk do przyłączenia
przewodów ochronnych. Zaciski te powinny być tak wykonane, aby przewody ochronne
mogły być do nich przyłączone w sposób trwały, z dostatecznym dociskiem lecz bez
uszkodzenia przewodu lub zacisku. Zacisk do przyłączania przewodów ochronnych należy
oznaczyć symbolem
Tabliczki znamionowe maszyn elektrycznych
Tabliczka znamionowa to trwale przymocowany do urządzenia krótki jego opis
zawierający informacje takie jak np.:
−
nazwę wytwórcy,
−
typ maszyny wg oznaczenia wytwórcy,
−
numer fabryczny maszyny,
−
rok produkcji,
−
masa urządzenia,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
−
moc znamionową,
−
napięcie i prąd zasilania,
−
prędkość wirowania,
−
stopień ochrony obudowy (np. IP 45).
W zależności od maszyny dane na tabliczce znamionowej będą uzupełniane o konkretne dla
danego typu maszyn.
Rys. 13. Przykład tabliczki znamionowej [8]
Sposoby oznaczania typów maszyn elektrycznych
Oznaczenia typów maszyn elektrycznych podawane na tabliczkach znamionowych
odpowiadają symbolom katalogowym. Przykład kilku symboli niektórych typów maszyn:
−
Maszyny prądu stałego – np. symbol PZBb22b
W symbolu tym: pierwsza litera P – maszyna prądu stałego,
druga litera Z – rodzaj obudowy maszyny (zamknięta),
trzecia litera B – sposób wzbudzenia (bocznikowy),
czwarta litera b – symbol serii,
pierwsza cyfra 2 – wielkość mechaniczna (druga),
druga cyfra 2 – liczba biegunów głównych (dwa),
ostatnia litera b – długość pakietu blach wirnika.
−
Silniki indukcyjne – np. symbol SZJe – 12a
W symbolu tym: pierwsza litera S – silnik indukcyjny,
druga litera Z – budowa zamknięta,
trzecia litera J – budowa wirnika, jednoklatkowego,
czwarta litera e – seria,
pierwsza cyfra 1 – wielkość mechaniczna,
druga cyfra 2 – liczba biegunów (dwa),
ostatnia litera a – długość pakietu blach.
Badania i pomiary maszyn elektrycznych
Każda maszyna elektryczna, nowa lub wyremontowana, może być użytkowana dopiero
po stwierdzeniu zgodności jej wykonania z obowiązującymi normami oraz przepisami
o eksploatacji.
Prawidłowość wykonania maszyny można stwierdzić wyłącznie na podstawie
uzyskanych wyników badań, które należy porównać z wartościami określonymi przez normy
państwowe lub przepisy i zarządzenia.
Maszyny powinny być badane w wytwórni w zakładzie naprawczym lub w miejscu
eksploatacji.
Pierwszym badaniem są oględziny, polegające na sprawdzeniu, czy maszyna odpowiada tym
wymaganiom, których spełnienie może być stwierdzone bez wykonania prób lub
rozmontowania maszyny.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Podczas oględzin należy ze szczególną uwagą sprawdzić:
−
jakość montażu, np. dokręcenie i zabezpieczenie przed odkręceniem się śrub, możliwość
swobodnego obracania się wirnika, prawidłowość oznaczania zacisków itp.,
−
treść tabliczki znamionowej,
−
istnienie zacisku ochronnego i właściwe jego oznaczenie,
−
wymiary montażowe.
Badaniem o istotnym znaczeniu, które należy wykonać w każdej maszynie, jest pomiar
rezystancji izolacji uzwojeń w stosunku do korpusu maszyny i między uzwojeniami.
Wyróżnia się pomiar rezystancji izolacji:
−
na zimno,
−
maszyny nagrzanej
Pomiary rezystancji izolacji, zarówno w stanie zimnym, jak i nagrzanym, przeprowadza się
prądem stałym za pomocą megomierzem (induktorowy miernik izolacji).
Zasady zabezpieczenia maszyn elektrycznych
Podczas realizacji wcześniejszych jednostek modułowych zapoznałeś się dokładniej
z rodzajami ochrony przeciwporażeniowej.
Niezawodność maszyn elektrycznych zależy nie tylko od warunków ich użytkowania
i obsługiwania, ale w istotnym stopniu również od rodzaju i skuteczności działania systemu
zabezpieczeń, czyli systemu ochrony maszyn przed skutkami niewłaściwego ich użytkowania,
przed skutkami powstałych w maszynie uszkodzeń bądź przed skutkami oddziaływania
czynników zewnętrznych.
Najprostszym przykładem czynnika zewnętrznego, który może łatwo spowodować
uszkodzenie izolacji, a zwłaszcza izolacji transformatora, jest wyładowanie piorunowe. Do
ochrony maszyn przed tymi wyładowaniami stosuje się zabezpieczenie w postaci
odgromników instalowanych w liniach elektroenergetycznych lub stacjach transformatorowo-
-rozdzielczych.
Każdy użytkownik maszyn elektrycznych musi mieć świadomość zagrożeń, jakie
wynikają z faktu, że maszyny elektryczne w czasie pracy znajdują się pod napięciem
i są w ruchu. Stwarza to niebezpieczeństwo występowania następujących podstawowych
zagrożeń:
−
porażenie prądem elektrycznym,
−
uszkodzenia mechaniczne.
Ponadto mogą wystąpić inne zagrożenia takie jak:
−
poparzenie łukiem,
−
uszkodzenia mechaniczne ciała,
−
uszkodzenia słuchu na skutek nadmiernego hałasu.
Zgodnie z przepisami dotyczącymi ochrony przeciwporażeniowej, każda maszyna
powinna być tak skonstruowana i zainstalowana, aby podczas jej normalnej pracy i w stanach
awaryjnych nie pojawiło się napięcie na jej obudowie ani na jakiejkolwiek innej części
dostępnej dla obsługi.
We wszystkich maszynach elektrycznych stosuje się ochronę przeciwporażeniową.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Na co należy zwrócić uwagę podczas eksploatacji maszyn elektrycznych?
2. Jakie najważniejsze informacje powinna zawierać tabliczka znamionowa?
3. Jakie są ogólne warunki pracy maszyn elektrycznych?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
4. Jakie znasz kryteria doboru typu silnika?
5. Kiedy występuje stan ustalony układu napędowego, a kiedy stan nieustalony?
4.2.3. Ćwiczenia
Ćwiczenie 1
Odczytując z tabliczki symbol SNg90 określ jaki to rodzaj maszyny.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przejrzeć oznaczenia maszyn elektrycznych w katalogu,
2) zidentyfikować rodzaj silnika wg. oznaczeń,
3) krótko scharakteryzować rodzaj silnika.
Wyposażenie stanowiska pracy:
–
tabliczka znamionowa,
–
katalogi,
–
podręcznik,
–
literatura wskazana przez nauczyciela,
–
materiały i przybory do pisania.
Ćwiczenie 2
Zaplanuj tabliczkę znamionową dowolnego urządzenia elektrycznego na podstawie
danych katalogowych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z danymi katalogowymi wybranego urządzenia,
2) zaprojektować tabliczkę znamionową wybranego urządzenia,
3) odczytać dane z katalogu urządzenia,
4) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
katalogi,
–
podręczniki,
–
literatura wskazana przez nauczyciela,
–
materiały i przybory do pisania.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) określić, ogólne warunki pracy maszyn elektrycznych np. trwałość
maszyny?
¨
¨
2) podać przyczyny drgań w maszynach elektrycznych?
¨
¨
3) określić podstawowe parametry jakie zawiera tabliczka znamionowa?
¨
¨
4) określić, co oznacza eksploatacja i co obejmuje?
¨
¨
5) określić, jak oznaczamy maszyny prądu stałego?
¨
¨

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
4.3. Zasady działania i eksploatacji urządzeń grzewczych
4.3.1. Materiał nauczania
Elektroniczne urządzenia grzejne są częścią elektrycznych urządzeń grzejnych.
W elektrycznych urządzeniach grzejnych wykorzystuje się częstotliwości od 0 Hz (prąd stały)
do kilkudziesięciu gigaherców, a moce od kilku watów do kilkudziesięciu megawatów
(np. piece łukowe). Część elektrycznych urządzeń grzejnych nie zawiera układów
elektronicznych.
Elektroniczne urządzenia grzejne przekształcają energię elektryczną na energie cieplną za
pośrednictwem układów elektronicznych.
Przekształcenie to może się odbywać na zasadzie wykorzystania:
−
prądu stałego – piece łukowe, termoelektrolizery,
−
drgań małej częstotliwości – piece rezystancyjne, indukcyjne i łukowe,
−
drgań wielkiej częstotliwości – grzanie indukcyjne, pojemnościowe, jonowe,
−
drgań bardzo wielkiej częstotliwości – kuchnie mikrofalowe,
−
promieniowanie laserowe.
Zasady nagrzewania ultradźwiękowego
Nagrzewanie ultradźwiękowe jest to nagrzewanie elektryczne, polegające na
wykorzystaniu zamienianych w ciepło drgań mechanicznych powstających w wyniku
absorpcji energii ultradźwiękowej.
Fale ultradźwiękowe (ultradźwięki) są to fale sprężyste o częstotliwościach od 16 kHz do
l GHz. Ich transmisja polega na rozprzestrzenianiu się zaburzeń naprężeń lub ciśnień
i związanych z tym zjawiskami drgań mechanicznych cząstek ośrodka.
Do zasilania urządzeń ultradźwiękowych stosuje się generatory tranzystorowe i falowniki
tyrystorowe, a do zasilania elektronicznych urządzeń grzejnych stosuje się tyrystorowe
prostowniki sterowane, sterowniki tyrystorowe, przemienniki częstotliwości.
Większość urządzeń grzejnych pracuje w układach automatycznej regulacji temperatury.
Czujnikami stosownymi w tych układach są:
−
termorezystory (od – 250°C do + 850°C),
−
termopary (od – 200°C do + 1500°C).
Przy temperaturze do + 150°C można także stosować czujniki półprzewodnikowe takie, jak:
−
precyzyjne termistory (od – 80°C do + 150°C),
−
scalone czujniki z przetwornikami (temperatury na częstotliwość, temperatury na prąd,
temperatury na postać cyfrową).
Piece oporowe
W piecach oporowych (rezystancyjnych), wykorzystuje się ciepło Joule' a powstające
podczas przepływu prądu przez elementy grzejne wykonane z materiałów oporowych stałych.
Q = I
2
∙ R
gdzie: I – natężenie prądu, R – rezystancja przewodnika, Q – ciepło
W piecach rezystancyjnych elementy grzejne R
o
są wykonane z metali lub specjalnych
stopów metali o dużej rezystywności i dużej trwałości. Elementy grzejne są zasilane
najczęściej z sieci energetycznej za pośrednictwem sterowników tyrystorowych. Stosuje się
układy zasilania jednofazowe i trójfazowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
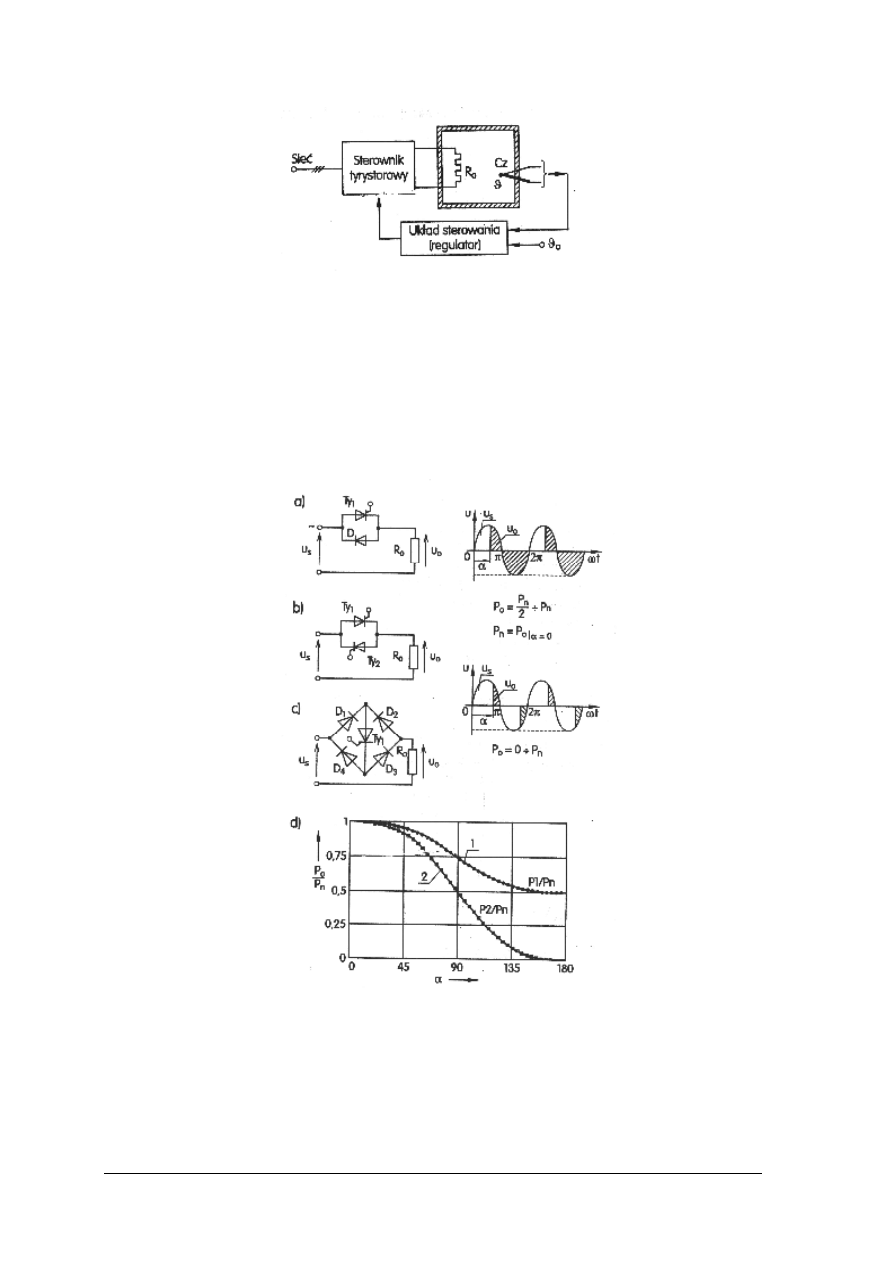
Rys. 14. Budowa układu sterowa napięcia oporowego [3, s.157]
Sterowanie tyrystorów przez zmianę kąta zapłonu powyżej 1 kW powoduje tak duże
zakłócenia elektromagnetyczne, że powinno stosować się sterowanie grupowe tyrystorów
albo odpowiednie układy filtrujące. Piece oporowe mają tak duże stałe czasowe, że nawet
dłuższe przerwy pomiędzy impulsami grzejnymi nie powodują pulsowania temperatury pieca.
Podstawowe układy sterowania mocą grzejną pieców oporowych:
−
układ niesymetryczny,
−
układ symetryczny.
Rys. 15. Podstawowe układy sterowników tyrystorowych jednofazowych: a) układ niesymetryczny, b, c) układ
symetryczne, d) charakterystyki sterowania układu niesymetrycznego (1) i symetrycznego (2),
T
1
, T
2
– tyrystory; D, D
1
, D
2
, D
3
, D
4
– diody; u
s
– napięcie sieci, u
o
– napięcie elementu grzejnego,
P
n
– moc maksymalna przy α = 0 [3, s.158]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Układ jest niesymetryczny, gdyż dioda stale przepuszcza ujemne połówki sinusoid. Jeżeli
tyrystor jest stale zablokowany, to moc obciążenia
2
n
o
P
P
=
(przy czym:
o
s
n
R
U
P
2
=
,
gdzie U
s
– wartość skuteczna napięcia sieci). Moc grzejną można zmienić w granicach od
2
n
P
do P
n
za pomocą kąta zapłonu tyrystora (krzywa 1).
W układzie symetrycznym moc można zmienić w szerszych granicach od 0 do P
n
(krzywa 2).
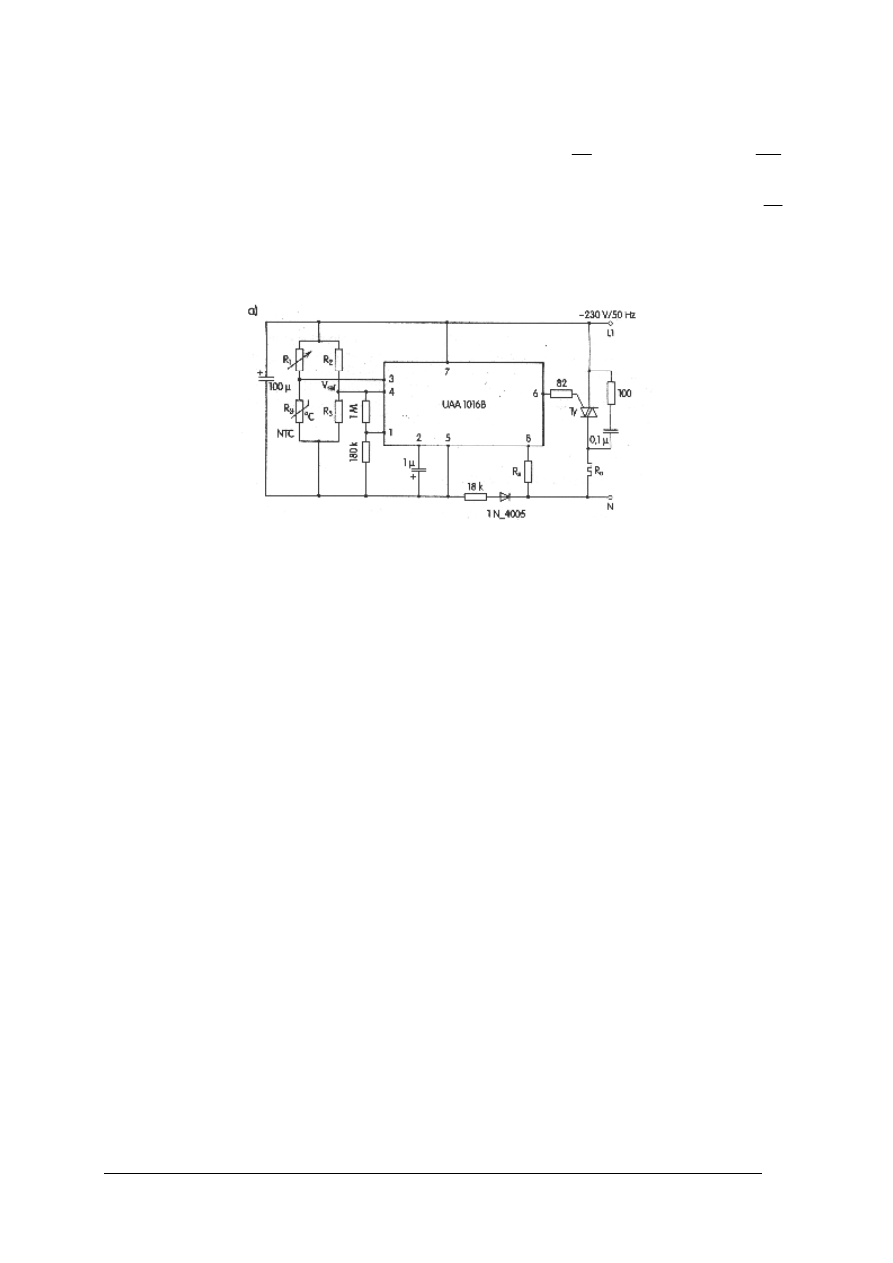
Rys. 16. Układ sterowania pieca oporowego: a) schemat strukturalny; Ty – tyrystor, R
o
– rezystancja elementu
grzejnego, L1 – przewód fazowy sieci, N – przewód neutralny sieci, NTC – termistor [3, s.159]
Do grupowego sterowania tyrystorami symetrycznymi (tzw. triakami) stosuje się układy
scalone. Układy te oprócz sterowania triakami pełnią rolę dwupołożeniowych regulatorów
temperatury. Przykładem może być układ scalony UAA1016B może sterować triakiem Ty
o prądzie bramki do 120 mA o napięciu 230 V/50 Hz umożliwia sterowanie mocą około
9 kW.
Rezystor Rυ jest czujnikiem temperatury pieca. Triak Ty doprowadza moc grzejną do
grzejnika Ro. Rezystor R1 służy do nastawiania temperatury zadanej, a Rs służy do
nastawiania okresu powtarzania grup sinusoid. Jeżeli zamiast termistora zastosujemy
termorezystor PT100, to w mostku pomiarowym należy zmienić miejscami R1 z Rυ ponieważ
termorezystor ma dodatni współczynnik temperaturowy (NTC ujemny).
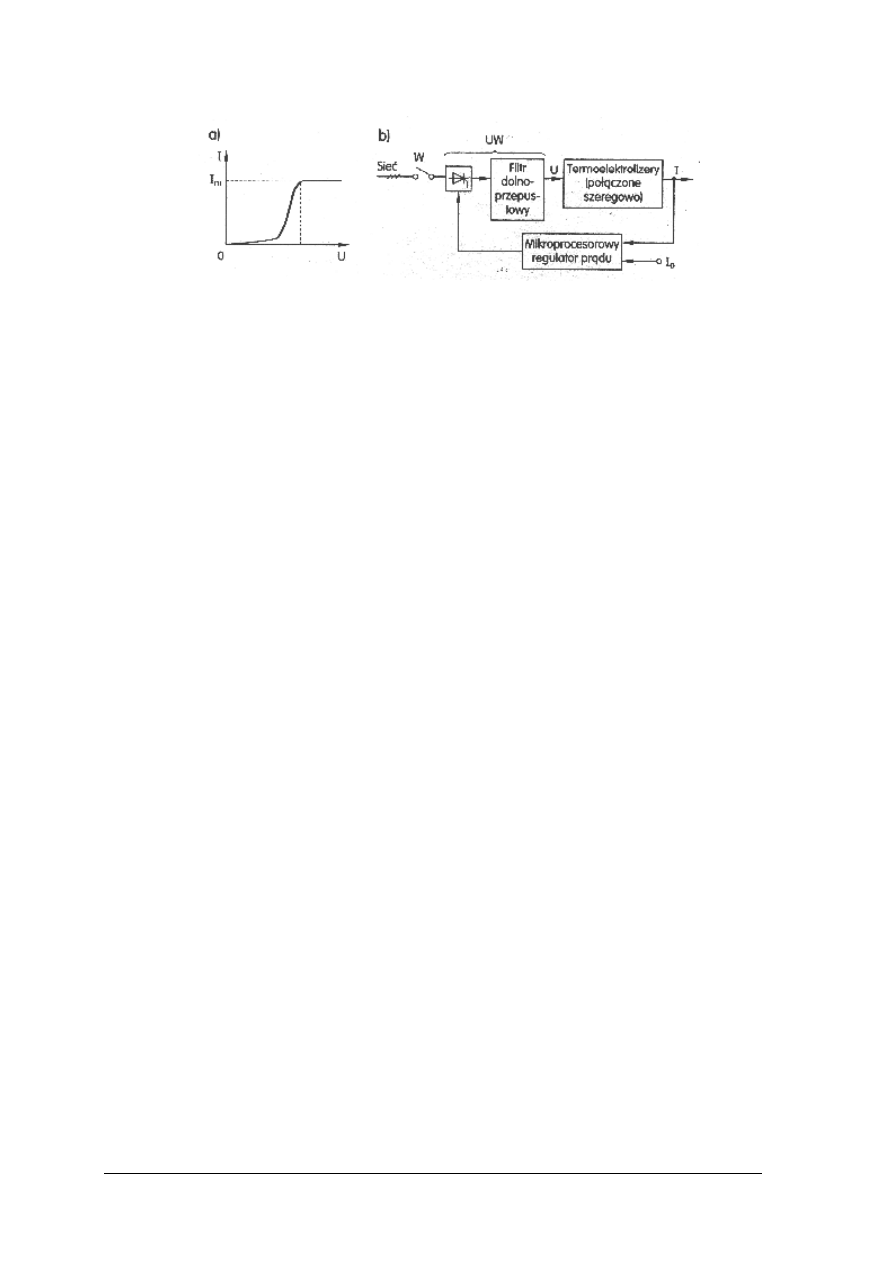
Termoelektrolizery
W termoelektrolizerach przeprowadza się elektrolizę i nagrzewanie elektrolitu, są
zasilane prądem stałym. Stosuje się do wytwarzania metali nieżelaznych głównie (do
produkcja: Al, Be, Ca, Ce, Li, Mg, Na, Nb).
Elektrolitem są roztopione sole tych metali. Ciepło do nagrzewania elektrolitu
i utrzymania elektrolitu w stanie ciekłym uzyskuje się z energii elektrycznej dostarczonej do
procesu.
Proces elektrolizy odbywa się przy napięciu (np.4,5÷5,5 V aluminium) lub około7,5 V
(magnezu). Ze względu na dość niskie napięcie stosuje się szeregowe łączenie
termoelektrolizerów (zasilanych napięciem sterowanym w granicach od 0,9÷1,1 kV).
Prąd elektrolizy zależy od wielkości elektrolizera i od temperatury elektrolitu (wynosi np.
30÷300 kA).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Rys. 17. Termoelektroliza: a) charakterystyka I (U) dla aluminium, b) układ regulacji prądu elektrolizy;
W – wyłącznik zasilania, UW – układ wykonawczy, I
o
– prąd zadany, U i I – napięcie i prąd
elektrolizy [3, s.160]
Najlepszym sposobem sterowania procesem termoelektrolizy jest regulacja prądu.
Mikroprocesorowy regulator prądu jest układem szybko działającym i oprócz stabilizowania
prądu umożliwia rozruch termoelektrolizera i sterowanie załadunkiem wsadu, którego ilość
określa się na podstawie wartości prądu.
Sprawność procesów termoelektrolizy zależy od temperatury elektrolitu, optymalna
temperatura elektrolitu przy produkcji aluminium zawiera się w granicach od 940ºC÷960ºC.
Piece indukcyjne
Piece indukcyjne wykorzystują zjawisko powstawania prądów wirowych pod wpływem
zmiennego pola magnetycznego.
Nagrzewanie indukcyjne stosuje się przy: lutowaniu, wyżarzaniu, topieniu metali,
hartowaniu stali.
Do topienia metali w hutach i odlewniach używa się pieców indukcyjnych zasilanych
prądem o częstotliwości 25÷60 Hz. Do nagrzewania odkuwek i obróbki cieplnej dużych
elementów stosuje się częstotliwość 300 Hz÷3 kHz.
Prądy o większej częstotliwości są używane do lutowania małych elementów, np.do
lutowania puszek.
Przedmiot nagrzewany w piecu wielkiej częstotliwości umieszcza się w cewce
indukcyjnej zwanej induktorem lub wzbudnikiem. Induktor jest wykonany z rurki
miedzianej, przez którą przepływa woda chłodząca go. Induktor jest zasilany prądem
przemiennym pobieranym z elektronicznych generatorów wielkiej częstotliwości.
W piecach indukcyjnych małej mocy są stosowane falowniki tyrystorowe o mocy
osiągającej 1MW, mają one dużą sprawność a poza ty umożliwiają łatwą zmianę
częstotliwości o szerokich granicach. Generatory tranzystorowe stosuje się przy mocy do
kilku kilowatów i częstotliwości do kilkuset kHz.
Generatory dużej mocy o częstotliwości powyżej 100 kHz są budowane na lampach –
triodach.
Charakterystyczną cechą nagrzewania indukcyjnego jest to, że ciepło jest wytworzone
wewnątrz nagrzewanego przedmiotu, głównie w jego części znajdującej się w zasięgu
wytworzonego pola magnetycznego
Układ zasilania i sterowania pieców indukcyjnych
Podstawowy piec indukcyjny składa się z układu sterowania i blokady, generatora LC,
zasilacza i wzbudnika (induktora). Układ sterowania i blokady zabezpiecza zasilacz
i generator przed zwarciami oraz nadzoruje i koordynuje pracę pieca indukcyjnego. Generator
wytwarza sygnał o dużej częstotliwości. Zasilacz zapewnia odpowiednie napięcie do
generatora. Wzbudnik (cewka indukcyjna) jest połączony z generatorem i wytwarza zmienne
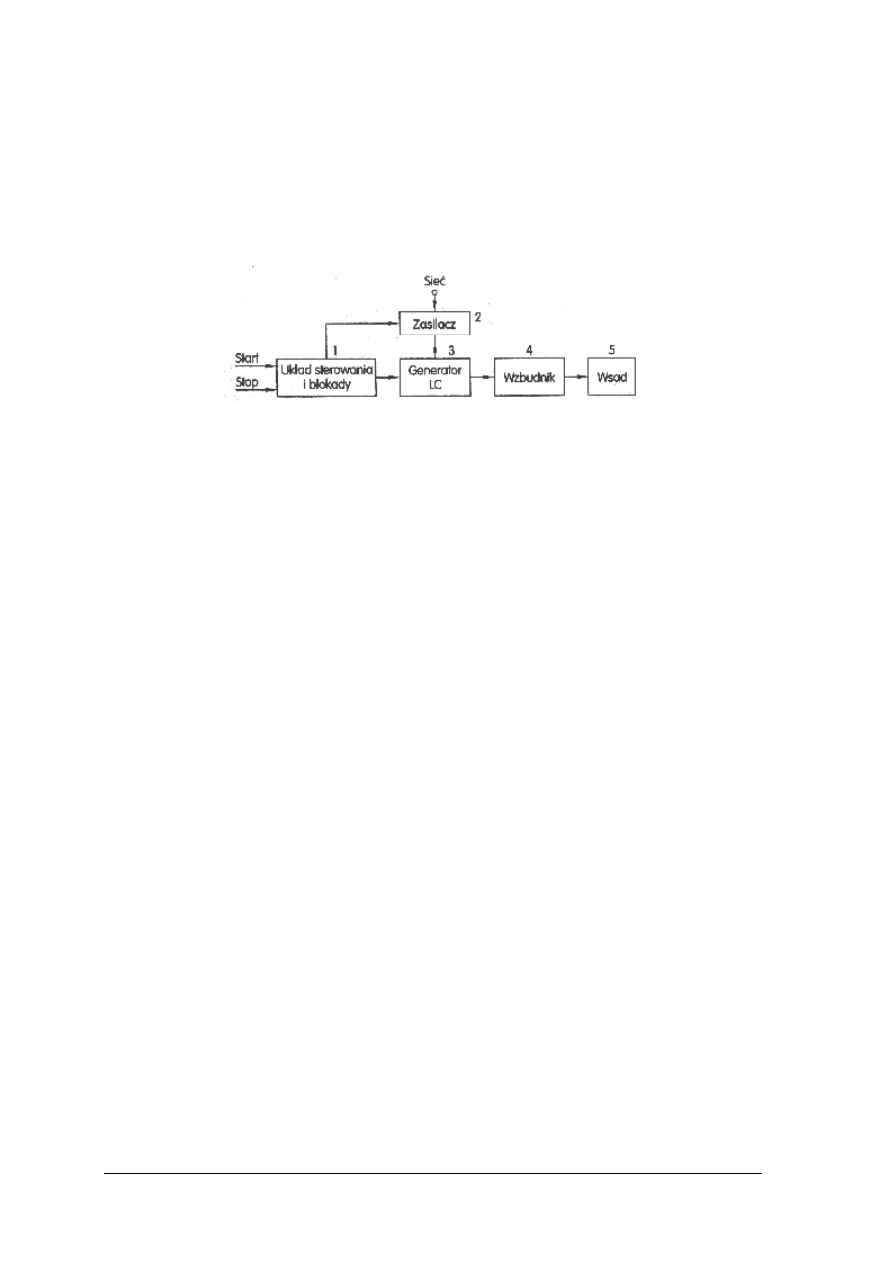
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
pole magnetyczne. Przedmiot nagrzewany umieszcza się w wzbudniku, a wytworzone
zmienne pole magnetyczne indukuje się w przedmiocie. Następnie powstają prądy wirowe,
które nagrzewają umieszczony przedmiot. Piec indukcyjny działa na podobnej zasadzie co
mikrofalówka – tzn. nagrzewa przedmiot od środka. Umieszczony przedmiot musi być
wykonany z przewodnika. Generatory pieców indukcyjnych to generatory wysokiej
częstotliwości, falowniki tyrystorowe, generatory tranzystorowe lub generatory dużej mocy
zbudowane na triodach.
Rys. 18. Schemat funkcjonalny pieca indukcyjnego [3, s.163]
Lampa generacyjna L
1
jest triodą dużej mocy chłodzoną wodą. Lampy o tak dużej
mocy mają katody żarzone bezpośrednio, wykonane z wolframu pokrytego torem.
Rezystancja katody zimnej jest 9 razy mniejsza od rezystancji katody nagrzanej do
temperatury jej pracy do 2000ºC.
Prąd żarzenia w chwili włączenia napięci jest ograniczony przez dławik Dł
1
. Dławik ten
wraz z kondensatorem C
1
i transformatorem Tr
1
tworzy ferrorezonansowy stabilizator
napięcia żarzenia.
Obwód rezonansowy generatora składa się z kondensatora C i transformatora wielkiej
częstotliwości Tr
3.
Zadaniem transformatora Tr
3
jest dopasowanie rezystancji obciążenia
(wsadu) do właściwej rezystancji generatora. Rezystancja optymalna dla lampy generacyjnej
wynosi około 3,5 Ω, rezystancja wsadu jest rzędu 0,1 Ω.
Układ sterowania i blokady pieca zawiera stycznik, przekaźnik, przycisk, czujnik
zamknięcia drzwi i czujniki przepływu wody chłodzącej.
Obwody blokady uniemożliwiają włączenie wysokiego napięcia w przypadku otwarcia
szafy pieca lub braku przepływu wody chłodzącej lampę generacyjną. Zabezpiecza to obsługę
pieca przed porażeniem, a generator przed awarią.
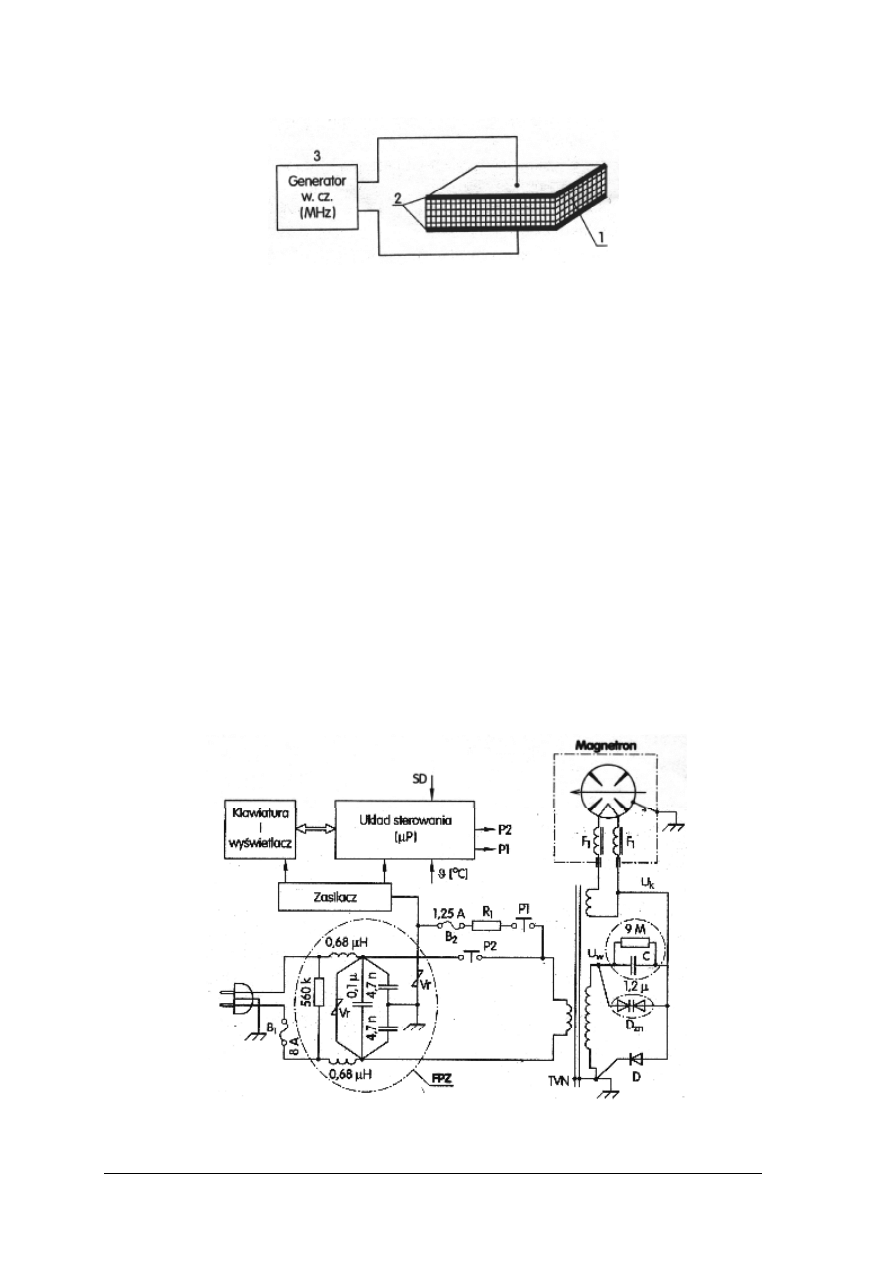
Piece pojemnościowe
Piece pojemnościowe działają na zasadzie wytwarzania ciepła wewnątrz dielektryka pod
wpływem szybkozmiennego pola elektrycznego wielkiej częstotliwości.
Nagrzewanie pojemnościowe stosuje się do:
−
sterylizacji żywności i środków opatrunkowych,
−
w lecznictwie do leczenia niektórych schorzeń,
−
suszenie zboża,
−
gotowania i pieczenia pożywienia,
−
zgrzewanie folii plastikowych,
−
obróbka gumy,
−
klejenie i suszenie drewna.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Rys.19. Schemat układu nagrzewania pojemnościowego; 1 – wsad, 2 – elektrody, 3 – generator wielkiej
częstotliwości (w.cz.) [3, s.169]
Sprawność grzania pojemnościowego jest mniejsza niż 50%. W nagrzewaniu
pojemnościowym stosuje się częstotliwość od kilku do kilkuset MHz, a moc od kilkuset
watów do 1 MW.
Generatory używane w piecach pojemnościowych są generatorami lampowymi (duże
moce i wielkie częstotliwości). Górna wartość uzyskiwanych częstotliwości zależy od
pojemności międzyelektrodowych triod generacyjnych. Moc grzejna przekazywana wsadowi
zależy od amplitudy napięcia wytwarzanych drgań, zatem triody generacyjne są lampami
wysokonapięciowymi.
Nagrzewanie mikrofalowe
Urządzenia mikrofalowe wykorzystują nagrzewanie elektryczne oparte na efekcie
polaryzacji w ośrodkach dielektrycznych lub półprzewodnikowych zasilanych energią
wielkiej częstotliwości za pośrednictwem falowodu. Zakres częstotliwości mikrofalowych
obejmuje przedział od 300 MHz do 300 GHz. Źródłem mocy grzejnej jest lampa
mikrofalowa. Największe urządzenia osiągają moc 500 kW przy sprawności 60%. Technika
mikrofalowa znalazła zastosowanie w przemyśle do nagrzewania materiałów o małej
przewodności cieplnej np. wulkanizacja profili gumowych, pasteryzacja środków
spożywczych, kruszenie skał. Kuchnie mikrofalowe służą do podgrzewania produktów
spożywczych.
Rys. 20. Schemat układu nagrzewania pojemnościowego: 1 – wsad, 2 – elektrody, 3 – generator wielkiej
częstotliwości (w.cz.) [3, s.174]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Układ sterowania (kuchni mikrofalowej) pełni następujące funkcje:
−
zapewnia bezpieczny dopływ mocy do magnetronu (stan drzwi SD),
−
umożliwia programowanie cyklu grzania za pomocą klawiatury,
−
wyświetla informacje w czasie programowania,
−
wyświetla czas bieżący, a w czasie grzania – czas, jaki pozostał do zakończenia grzania,
−
kontroluje temperaturę komory grzejnej i komory (υ), w której znajdują się układy,
−
zabezpiecz łagodny start grzania (najpierw załącza przekaźnik P1, a później P2).
Urządzenia ultradźwiękowe
Ultradźwięki są drganiami mechanicznymi ośrodków sprężystych takich jak:
−
powietrze,
−
woda,
−
beton,
−
metale i itp.
Ultradźwięki znalazły zastosowanie w: przemyśle, medycynie, hydroakustyce, przy
czyszczeniu drobnych przedmiotów oraz lutowania i zgrzewania metali lekkich.
Wytwarzanie drgań mechanicznych o częstotliwości ultradźwiękowej polega na
wykorzystaniu zjawisk magnetostrykcji i elektrostrykcji. Obydwa zjawiska polegają na
kurczeniu się pewnych materiałów pod wpływem zwiększania natężenia pola magnetycznego
lub elektrycznego. Jeśli taki materiał umieścimy w szybkozmiennym polu magnetycznym lub
elektrycznym, to wystąpią szybkozmienne odkształcenia materiału o częstotliwości zmian
pola.
Działanie przetworników ultradźwiękowych jest odwracalne, tzn. że zmianą naprężeń
materiału przewodnika, wywołanym zmianami sił zewnętrznych, towarzyszą: w przetworniku
magnetostrykcyjnym zmiany pola magnetycznego, a w przetworniku piezoelektrycznym –
zmiany pola elektrycznego.
Fale ultradźwiękowe można podzielić na kategorie:
−
o małym natężeniu do 1 W/cm
2
,
−
o średnim natężeni – 1÷10 W/cm
2
,
−
o dużym natężeniu – 10÷1000 W/cm
2
.
Przetworniku ultradźwiękowe dzielimy na:
−
piezoelektryczne (naprężenia i odkształcenia zależą od wartości i kierunku napięcia),
−
elektrostrykcyjne (naprężenia zależą od E
2
– kwadratu natężenia pola elektrycznego, nie
od kierunku),
−
magnetostrykcyjne (odkształcenia zależą od H
2
– kwadratu natężenia pola
magnetycznego).
Eksploatacja urządzeń elektrotermicznych
Przyjmowanie do eksploatacji
Przyjęcie do eksploatacji urządzeń grzejnych, nowych lub po remoncie może nastąpić po
stwierdzeniu, że:
−
odpowiadają wymaganiom określonym w normach i przepisach dotyczących budowy
urządzeń grzejnych oraz określonym przez wytwórcę lub jednostkę organizacyjną, która
wykonała remont urządzenia,
−
zainstalowano je zgodnie z dokumentacją techniczną,
−
odpowiadają warunkom ochrony przeciwporażeniowej i przeciwpożarowej,
−
wyniki badań technicznych,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
−
protokół odbioru technicznego urządzenia po remoncie potwierdza zgodność parametrów
technicznych z dokumentacją.
Na urządzeniach grzejnych powinny być umieszczone następujące informacje:
−
symbole elementów urządzenia, zgodnie z dokumentacją techniczną,
−
symbole zacisków ochronnych,
−
dane na tabliczkach znamionowych,
−
napisy określające funkcje elementów sterowania i sygnalizacji,
−
oznaczenia stosowanych zabezpieczeń i wartości ich nastawiania.
Oględziny i przeglądy urządzeń grzejnych
Oględziny urządzeń grzejnych są ustalane w instrukcji eksploatacji, z uwzględnieniem
zaleceń wytwórcy i warunków pracy urządzeń. Oględziny należy przeprowadzać w czasie
ruchu oraz postoju urządzeń nie rzadziej niż raz na kwartał.
Podczas oględzin w czasie ruchu urządzeń należy ocenić stan urządzeń, sprawdzając:
−
stan ochrony przeciwporażeniowej i przeciwpożarowej,
−
wskazania aparatury kontrolno-pomiarowej,
−
działanie i szczelność układu chłodzenia oraz temperaturę wody chłodzącej,
−
działanie aparatury sygnalizacyjnej, sterowniczej i zabezpieczającej,
−
stan napędów, instalacji i torów wielkoprądowych wraz z wyposażeniem,
−
stopień połączeń mechanicznych elektrycznych,
−
przestrzeganie programów pracy urządzeń grzejnych,
−
czystość urządzeń grzejnych.
W razie stwierdzenia nieprawidłowości należy je usunąć lub przekazać urządzenie do
remontu.
Czynności związane z załączeniem i wyłączaniem pieców elektrycznych
Czynności muszą być podane w instrukcji eksploatacyjnej danego pieca. Niektóre
czynności wstępne są wspólne dla wszystkich pieców niezależnie od ich konstrukcji. Należą
do nich:
−
sprawdzenie działania blokad, sterowania oraz ewentualnej automatyki,
−
oględziny zewnętrzne stanu pieca, oględziny urządzeń pomocniczych.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie metody przemiany energii elektrycznej na cieplną są stosowane w elektrycznych
urządzeniach grzejnych?
2. Co to są urządzenia elektrotermiczne pojemnościowe?
3. Czy potrafisz omówić zasadę budowy i zakres zastosowania pieców rezystancyjnych?
4. Czy znasz zasadę działania pieca indukcyjnego?
5. Jak działa termoelektrolizer do produkcji aluminium?
6. Na czym polegają oględziny urządzeń grzejnych?
4.3.3. Ćwiczenia
Ćwiczenie 1
Ile energii elektrycznej potrzeba na ogrzanie w warniku 60 dm
3
wody od 10ºC do 85ºC,
jeżeli sprawność η = 0,80?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) obliczyć ciepło potrzebne do ogrzania wody mnożąc masę m = 60 kg wody przez ciepło
właściwe c = 1 kcal/(kg·°C) i przez przyrost temperatury T2 – T1=75ºC,
2) policzyć ciepło użyteczne Quż = mc(T2 – T1),
3) policzyć ciepło wytworzone w elemencie grzejnym warnika Q
uż
=
η
Q
uż
.
Wyposażenie stanowiska pracy:
−
podręcznik,
−
zeszyt, kalkulator, przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Obliczyć czas potrzebny do zagotowania wody 1 dm
3
wody o temperaturze T
1
=10ºC
grzałką o mocy 750 W, jeżeli sprawność η = 0,90.
Aby wykonać ćwiczenie, powinieneś:
1) obliczyć ciepło potrzebne do ogrzania wody obliczyć mnożąc masę m = 60 kg wody
przez ciepło właściwe c = 1 kcal/(kg C
°
⋅
) i przez przyrost temperatury T
2
– T
1
= 75ºC,
2) obliczyć ciepło użyteczne Q
uż
= mc(T
2
– T
1
),
3) obliczyć ciepło wytworzone w elemencie grzejnym warnika Q
uż
=
η
Q
uż
,
4) obliczyć czas korzystając ze wzoru Q
c
= 860 P t
⋅
, czyli t = ? (przekształcić wzór).
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia,
−
zeszyt, kalkulator, przybory do pisania,
−
literatura wskazana przez nauczyciela.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wymienić funkcje układu sterowania w kuchence mikrofalowej?
¨
¨
2) rozpoznać układ niesymetryczny?
¨
¨
3) dokonać podziału fal ultradźwiękowych?
¨
¨
4) określić, zasady nagrzewania ultradźwiękowego?
¨
¨
5) dokonać oględzin urządzeń grzejnych w czasie pacy?
¨
¨
6) dokonać podziału przetworników ultradźwiękowych?
¨
¨
7) podać informacje zawarte na tabliczkach znamionowych urządzeń
grzejnych?
¨
¨

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
4.4. Zasady działania i eksploatacji urządzeń z napędem
elektrycznym
4.4.1. Materiał nauczania
Elektryczne urządzenie napędowe jest to silnik elektryczny prądu przemiennego lub
stałego wraz z układami służącymi do jego zasilania, regulacji, sygnalizacji, zabezpieczeń
i pomiarów.
Urządzenia napędowe dzielimy na następujące grupy:
−
I grupa – urządzenie o mocy większej niż 250 kW oraz urządzenia o napięciu powyżej
1 kV bez względu na wartość mocy,
−
II grupa – urządzenia mocy od 50 kW do 250 kW o napięciu znamionowym 1 kV
i niższym,
−
III grupa – urządzenia mocy poniżej 50 kW, ale nie mniejszej niż 5,5 kW,
−
IV grupa – urządzenia o mocy poniżej 5,5 kW.
Układy napędowe z zastosowaniem silników elektrycznych charakteryzują następujące
zasadnicze zalety:
−
możliwość napędzania poszczególnych elementów urządzenia silnikami o różnych
mocach i różniących się prędkościach wirowania,
−
możliwość automatyzacji rozruchu, hamowania i nastawiania prędkości wirowania,
−
łatwy sposób doprowadzenia energii,
−
duża sprawność i względnie mały ciężar,
−
cicha i bezpieczna praca,
−
duża pewność ruchowa i łatwa wymiana.
Podstawowymi parametrami znamionowymi określającymi typ silnika elektrycznego są:
moc, prędkość kątowa (obrotowa) i napięcie. Wielkości te, jak również podobieństwo
geometryczne lub podobne rozwiązania wentylacyjne, odgrywają dominująca rolę
w projektowaniu typoszeregu maszyn, podczas którego dobiera się zakres i stopniowanie
mocy znamionowych.
Wartości mocy znamionowych maszyn w serii maja duże znaczenie gospodarcze, gdyż
ułatwiają dobranie silnika najbardziej przydatnego do napędzania urządzenia.
W niektórych układach napędowych, w których są potrzebne przemieszczenia
o specjalnych wymaganiach, np. przemieszczenia liniowe lub kątowe, może być uzasadnione
stosownie tzw. serwomechanizmów. Są to układy automatycznej regulacji wraz z częścią
wykonawczą, nazywaną siłownikiem lub serwosilnikiem, zapewniającą uzyskanie
przesunięcia.
Serwomechanizmy są stosowane np. podczas przestawiania zaworów lub ustawiania
obrabianego przedmiotu (narzędzia) w sterowanych numerycznie obrabiarkach.
Siłowniki (jako części wykonawcze serwomechanizmów) dzieli się na elektryczne,
hydrauliczne i pneumatyczne.
Wśród serwomechanizmów małej i średniej mocy dominują siłowniki elektryczne, nazywane
też elektrycznymi silnikami wykonawczymi. Do elektrycznych silników wykonawczych,
spełniających takie np. wymagania jak: stabilność pracy, samohamowność, łatwość
sterowania i szybkość działania, zalicza się przede wszystkim silniki obcowzbudne prądu
stałego, silniki skokowe (krokowe), dwufazowe silniki, silniki indukcyjne oraz trójfazowe
silniki indukcyjne liniowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Ogólne warunki pracy układu napędowego
W układzie napędowym silnik wytwarza moment obrotowy napędzający M lub moment
hamujący M
h
. Urządzenie napędzane przez silnik wytwarza moment obciążenia M
obc.
Istnieją dwa podstawowe rodzaje stanów, w których może znajdować się układ napędowy:
stan ustalony i nieustalony.
Stan ustalony występuje wówczas, gdy moment obrotowy jest równy momentowi
obciążenia.
M = M
obc.
W takim stanie układ napędowy znajduje się w spoczynku lub ruchu ze stałą prędkością n.
Stany nieustalone (przejściowe) występują wówczas, gdy istniej nierówność.
M
≠
M
obc.
Pojawia się wówczas moment równy różnicy momentu napędowego i momentu obciążenia,
zwany momentem dynamicznym M
d
. Wywołuje on zmianę prędkości obrotowej n. Gdy
M > M
obc
, wówczas M
d
> 0 i prędkość n wzrasta, gdy zaś M < M
obc
, wówczas M
d
< 0
i prędkość n maleje.
Dla danej prędkości obrotowej równowagę momentów, zarówno w stanach ustalonych, jak
i nieustalonych (przejściowych), określa równanie ruchu napędu.
M = M
obc.
+ M
d
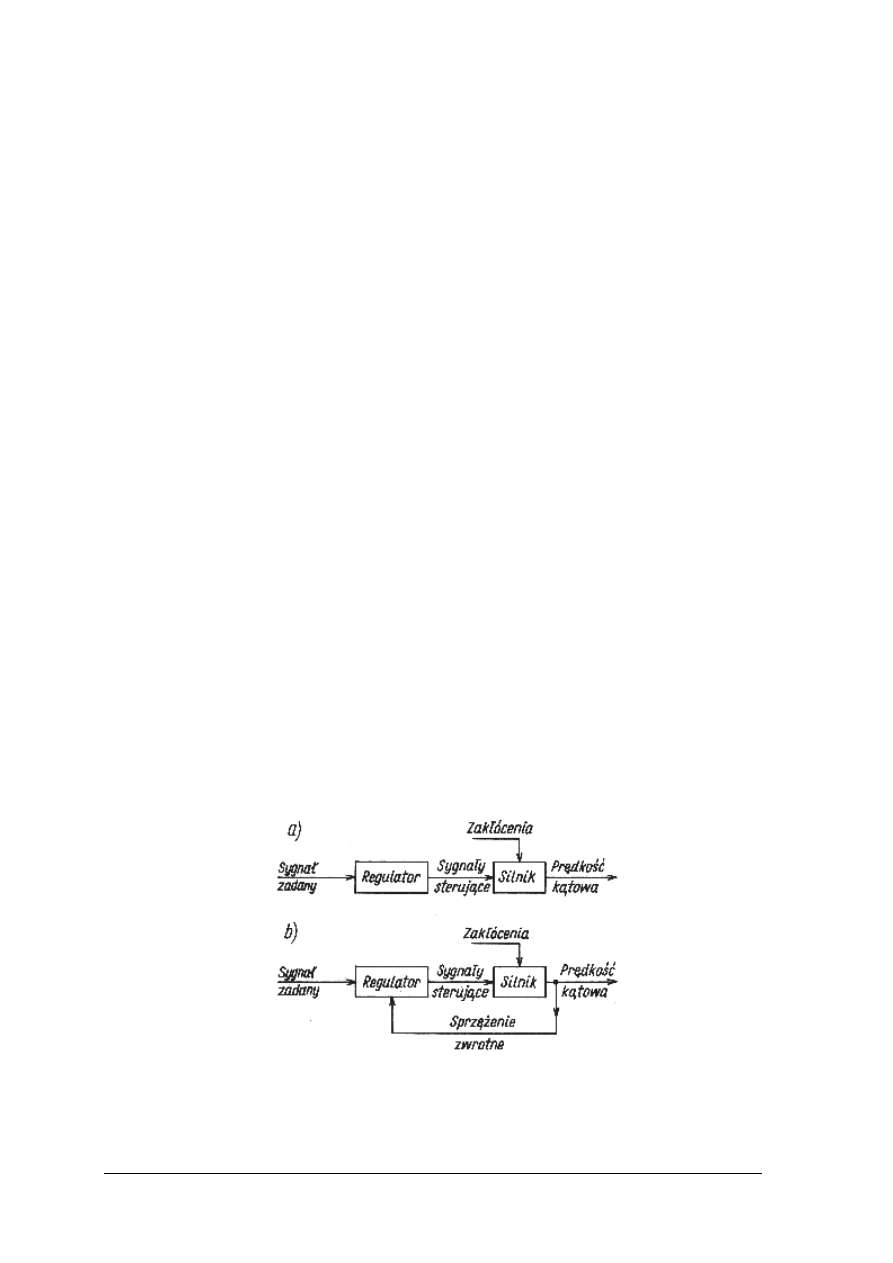
Elementy sterujące i regulacyjne
Sterowaniem silnika elektrycznego nazywa się takie na niego oddziaływanie, które
pozwala uzyskać zamierzone zachowanie się całego układu napędowego.
Dla osiągnięcia zamierzonego celu do silnika doprowadza się sygnały sterujące, czyli
regulujące jego pracę. Układ wytwarzające sygnały sterujące nazywa się regulatorem
(układem sterującym).
Jeżeli sygnały sterujące wychodzące z regulatora pozostają niezmienione mimo
zmieniających się warunków pracy silnika, układ sterowania silnika nazywa się otwartym.
Układ sterowania nazywa się zamkniętym lub układem ze sprzężeniem zwrotnym, jeśli
informacje o aktualnych warunkach pracy silnika wpływają na zmianę sygnałów sterujących.
Rys. 21. Układ sterowania: a) otwarty, b) zamknięty (ze sprzężeniem zwrotnym prędkościowym) [5, s.366]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Przykładem zamkniętego układu sterowania jest cykl rozruchu silnika, podczas którego do
regulatora dochodzą informacje o aktualnej wartości prędkości wirnika i wartości prądu
dopływającego z sieci.
Po ich otrzymaniu regulator powinien wysyłać takie sygnały sterujące, które gwarantują
wykonanie zadania polegającego np. na liniowym zwiększaniu prędkości przy nie
przekraczaniu prądu znamionowego silnika.
Do zrealizowania takiego zadania układ napędowy musi być wyposażony w elementy
pomiarowe (np. prądnice tachometryczne, boczniki, przekładniki prądowe i napięciowe),
przekaźniki, nastawniki, styczniki i wyłączniki, rozruszniki, rezystory regulacyjne itp.
elementy niezbędne do sterowania silników elektrycznych.
Układy napędowe z silnikami elektrycznymi
Większość urządzeń może być napędzana indukcyjnymi silnikami trójfazowymi,
z których najłatwiejszy do stosowania i najtrwalszy (najbardziej niezawodne) są silniki
z wirnikiem jednoklatkowym.
Silniki mniejszych mocy zasila się z sieci niskiego napięcia 400 V. W dużych zakładach
przemysłowych spotyka się zasilanie napięciem 500 V, a np. w górnictwie – również 660 V.
Silniki większych i dużych mocy są zasilane z sieci wysokiego napięcia 6 kV.
W urządzeniach dźwigowych (dźwignicowych) najczęściej stosuje się trójfazowe silniki
indukcyjne pierścieniowe z rezystorami (oporami) regulacyjnymi dołączonymi do obwodu
wirnika. W silnikach tego typu uzyskuje się dużą wartość początkowego momentu
rozruchowego. Silniki te umożliwiają łagodne podnoszenie i opuszczanie ciężarów
w dźwigach
W układach napędowych dźwignic o dużej precyzji działania, np. używanych
w kopalniach, luksusowych hotelach, na statkach itp., stosuje się obcowzbudne silniku prądu
stałego zasilane w układzie Leonarda lub z sieci prądu przemiennego przez układ tyrystorów.
W urządzeniach gospodarstwa domowego, na ogół zasilanych z sieci elektroenergetycznej
jednofazowej, są stosowane silniki indukcyjne oraz silniki komutatorowe są montowane
w odkurzaczach, w młynkach do kawy, a także w niektórych typach narzędzi takich jak:
wiertarki, szlifierki. Silniki indukcyjne są stosowane przede wszystkim w chłodziarkach
i pralkach.
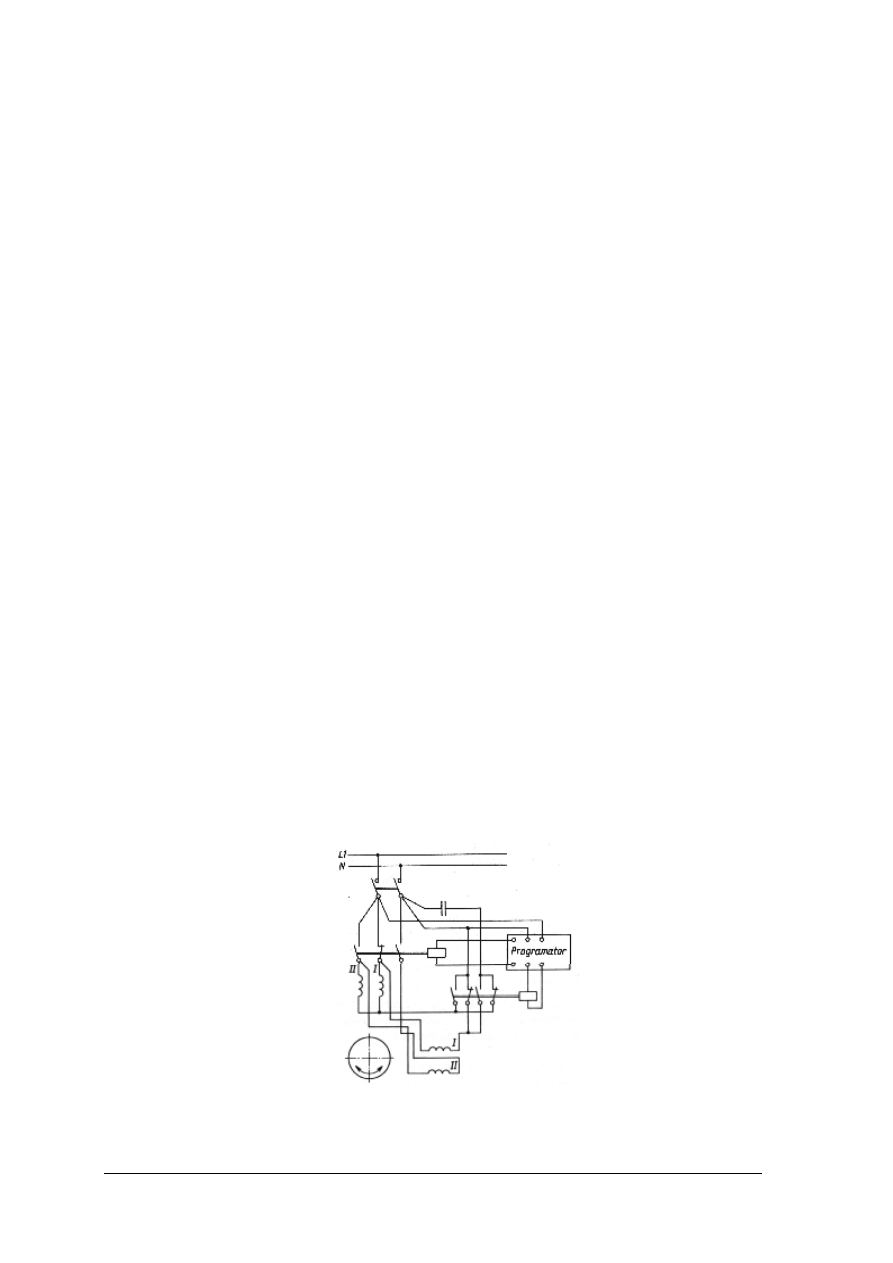
W pralce automatycznej konieczna jest ciągła zmiana kierunku ruch bębna przy
niewielkiej jego prędkości (podczas prania) oraz szybki ruch obrotowy bębna, w jednym tylko
kierunku, (podczas wirowania). Bęben z pralki jest napędzany z wału silnikiem elektrycznym
przez przekładnie pasową (pasek klinowy).
Rys. 22. Schemat połączeń uzwojeń stojana jednofazowego silnika indukcyjnego z kondensatorem pracy
zastosowanego do napędu domowej pralki automatycznej. I - oznacza uzwojenie o większej liczbi
biegunów załączane podczas prania, II - uzwojenie załączone podczas wirowania [5, s. 378]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Zasady doboru silników elektrycznych
Dobór silnika elektrycznego polega na wyborze jego typu i parametrów znamionowych.
Typ silnika (podany na tabliczce znamionowej i w katalogach) w formie uformowanych
znaków literowych lub literowo-cyfrowo określa:
−
rodzaj prądu, na jaki jest on zbudowany,
−
zasadę budowy i działania silnika,
−
przystosowanie silnika do odpowiedniego rodzaju pracy (praca ciągła, przerywana,
dorywcza),
−
rodzaj budowy silnika ze względu na ochronę od narażeń środowiskowych oraz ochrony
środowiska przed zagrożeniem stworzonym przez silnik,
−
rodzaj budowy silnika ze względu na sposób jego mocowania.
Parametrami silnika, które należy dobrać są:
−
napięcie znamionowe,
−
moment znamionowy,
−
moc znamionowa (lub prąd znamionowy),
−
znamionowa prędkość obrotowa.
Typ i parametry znamionowe silnika muszą być tak dobrane, aby były spełnione wymagania
dotyczące właściwości ruchowych układu napędowego, oraz aby były uwzględnione
istniejące możliwości zasilania silnika w energię elektryczną i właściwości środowiskowe
w miejscu jego ustawienia.
Półprzewodnikowe przyrządy mocy
Wynalezienie elementów półprzewodnikowych, a zwłaszcza tyrystora oraz takie
udoskonalenia w technologii produkcji tych elementów, które umożliwiły konstruowanie, na
masową skalę, coraz doskonalszych technicznie półprzewodnikowych przyrządów mocy
(ppm) wpłynęło na znaczące zwiększenie możliwości użytkowych różnego typu silników,
a jednocześnie wyraźne ograniczenie strat energii w urządzeniach sterujących ich pracę.
Urządzeniami
tymi
stały
się
układy
energoelektroniczne
(układy
statycznych
przekształtników mocy) złożone z ppm.
Powyższe przyrządy dokładnie zostały opisane w jednostce modułowej 725[01].O1.04
„Badanie i pomiary elektronicznych układów analogowych”.
Wiadomości ogólne o energoelektronicznych układach napędowych
Energoelektronicznym układem napędowym nazywa się układ napędowy, w którym
elektryczny silnik napędowy jest zasilany z sieci prądu przemiennego lub ze źródła napięcia
stałego przez układ przekształtników statycznych, a w tym przez układ tyrystorowy lub
tranzystorowy.
Energoelektroniczne układy napędowe są coraz częściej stosowane ze względu na łatwy
sposób regulacji napięcia lub prądu i powstającą dzięki temu możliwości zaoszczędzenia
energii elektrycznej wówczas, gdy układ przekształtnikowy pozwala na wyeliminowanie
rezystorów rozruchowych i regulacyjnych.
Wada przekształtników, poza dość wysoką ceną, jest wytwarzanie w prądzie napięciu
harmonicznych (składowych przemiennych o bardzo różnych częstotliwościach), które
zakłócają pracę zasilanego silnika oraz sieci dostarczającej energię do przekształtnika.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie są zalety napędu elektrycznego?
2. Kiedy układ napędowy pracuje w stanie ustalonym?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
3. Jakimi metodami można dokonać pomiarów różnych wielkości?
4. Jaka jest różnica między układem sterowania otwartym a zamkniętym?
5. Jak zmienia się moment obciążenia różnego rodzaju mechanizmów?
6. Jakie są zasady doboru silników elektrycznych?
4.4.3. Ćwiczenia
Ćwiczenie 1
Określ podstawowe uszkodzenia silników prądu stałego ich objawy i sposoby usuwania.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przypomnieć sobie jakiego rodzaju uszkodzenia występują w silnikach prądu stałego,
2) określić rodzaj uszkodzenia, możliwe przyczyny i niektóre sposoby wykrywania
i usuwania.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia,
−
katalog,
−
literatura wskazana przez nauczyciela,
−
materiały i przybory do pisania.
Ćwiczenie 2
Dokonaj pomiarów np.: napięcia, mocy czynnej, sprawności w transformatorze niskich
napięć za pomocą różnych przyrządów.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odczytać wskazania przy różnych zakresach pomiarowych,
2) obsłużyć przyrządy zarówno cyfrowe jak i analogowe,
3) dobrać zakresy pomiarowe na podstawie danych znamionowych urządzeń badanych,
4) stosować bezpieczne metody pomiarowe z zastosowaniem środków ochrony
przeciwporażeniowej.
Wyposażenie stanowiska pracy:
−
treść zadania dla pary uczniów,
−
różne typy przyrządów pomiarowych (tablicowe, laboratoryjne, serwisowe–analogowe
i cyfrowe),
−
rezystor suwakowy,
−
transformator,
−
zasilanie (komplet elektronarzędzi),
−
katalogi, zdjęcia, makiety, eksponaty przydatne do pomiarów,
−
literatura wskazana przez nauczyciela,
−
materiały i przybory do pisania.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) dobrać przyrządy pomiarowe do badania wybranej maszyny
elektrycznej?
¨
¨
2) wyjaśnić ogólne warunki pracy układu napędowego?
¨
¨
3) dobrać metody pomiarowe do badania urządzeń elektrycznych?
¨
¨
3) wykonać pomiary i protokół z wykonanych badań?
¨
¨
4) przeanalizować otrzymane wyniki pomiarów?
¨
¨
5) wyciągnąć wnioski dotyczące przydatności urządzenia badanego do
dalszej pracy?
¨
¨
6) zastosować podczas badań środki bezpieczeństwa?
¨
¨
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań o różnym stopniu trudności. Wszystkie zadania są zadaniami
wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi – zaznacz prawidłową
odpowiedź znakiem X (w przypadku pomyłki należy błędną odpowiedź zaznaczyć
kółkiem, a następnie ponownie zakreślić odpowiedź prawidłową).
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego
rozwiązanie na później i wróć do niego, gdy zostanie Ci czas wolny. Trudności mogą
przysporzyć Ci zadania: 17–20, gdyż są one na poziomie trudniejszym niż pozostałe.
Przeznacz na ich rozwiązanie więcej czasu.
8. Na rozwiązanie testu masz 90 minut.
Powodzenia
ZESTAW ZADAŃ TESTOWYCH
1. Laser znalazł zastosowanie w urządzeniach grzewczych
a) fotonowych.
b) plazmowych.
c) mikrofalowych.
d) ultradźwiękowych.
2. Symbol
oznacza, że
a) urządzenie posiada zacisk ochronny do przyłączenia przewodu PE lub PEN.
b) urządzenia
można
stosować
we
wszystkich
warunkach
i
wszystkich
pomieszczeniach.
c) urządzenia instalowane są tak, że nie ma możliwości dotknięcia jednocześnie dwóch
różnych części przewodzących.
d) urządzenie posiada przewód N.
3. Fale ultradźwiękowe są to fale sprężyste o częstotliwościach
a) 10 kHz do 16 kHz.
b) 11 kHz do 15 kHz.
c) 16 kHz do 1 GHz.
d) 15 MHz do 16 GHz.
4. Nagrzewnice pojemnościowe służą do
a) do topienia metali kolorowych.
b) rozmrażania rurociągów.
c) lutować w trudno dostępnych miejscach.
d) obróbki cieplnej dielektryków.
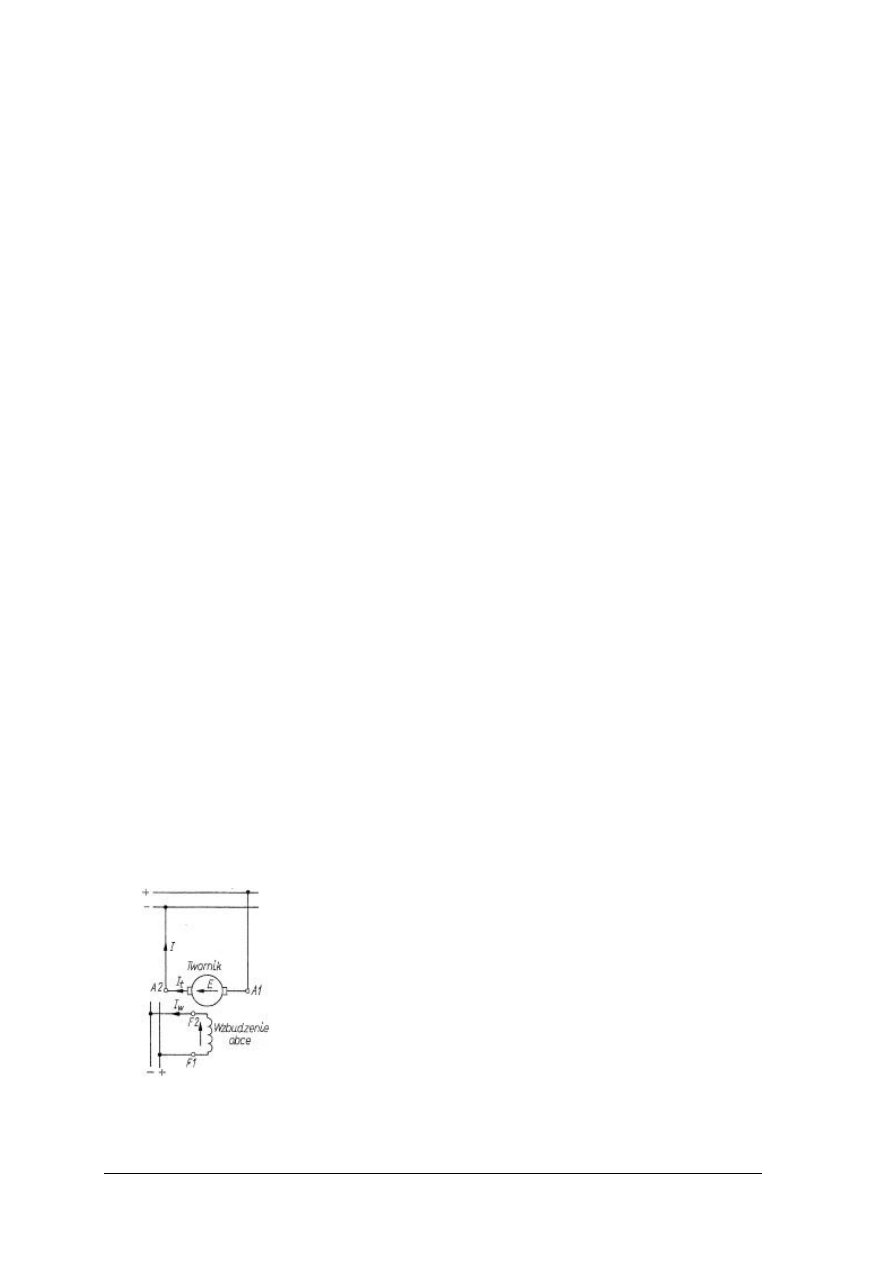
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
5. Do zalet układów napędowych z zastosowaniem silników elektrycznych zaliczamy
a) łatwy sposób doprowadzenia energii.
b) niską cenę.
c) prostą konstrukcję.
d) niezawodność.
6. Ze sposobów regulacji prędkości obrotowej w silniku prądu stałego może doprowadzić
do rozbiegania się maszyny
a) przez zmianę napięcia zasilania twornika.
b) przez zmianę strumienia wzbudzenia.
c) przez zmianę rezystancji w obwodzie.
d) przez zmianę częstotliwości.
7. Podczas wykonywania oględzin urządzeń elektroenergetycznych o napięciu do 1 kV nie
jest zabronione
a) zdejmowanie ogrodzeń i osłon lub przechodzenie przez nie.
b) wymiana wkładek bezpiecznikowych w nieuszkodzonych gniazdach.
c) wchodzenie na konstrukcje.
d) korzystanie z urządzeń II klasy ochronności.
8. Energię elektryczną na mechaniczną przetwarza urządzenie, którym jest
a) prądnica.
b) transformator.
c) silnik.
d) przetwornica.
9. W skład wirnika wchodzi
a) kadłub.
b) wał.
c) tarcze łożyskowe i łożysko.
d) jarzmo.
10. Rodzaje maszyny prądu stałego przedstawia rysunek
a) obcowzbudnej.
b) bocznikowej.
c) szeregowej.
d) szeregowo–bocznikowej.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
11. Silniki indukcyjne jednofazowe stosuje się
a) w przemyśle.
b) w sprzęcie gospodarstwa domowego.
c) w elektrowniach.
d) w trakcji.
12. Częstotliwość sieciowa w Europie wynosi
a) 50 Hz.
b) 55 Hz.
c) 60 Hz.
d) 65 Hz.
13. W symbolu SZJe – 12a, trzecia litera oznacza
a) silnik indukcyjny.
b) budowę wirnika, jednoklatkowego.
c) wielkość mechaniczną.
d) budowę zamkniętą.
14. Instrukcja eksploatacyjna powinna zawierać
a) książki i raporty.
b) ogólną charakterystykę urządzenia (np. moc, napięcie).
c) dokumenty dotyczące oględzin.
d) karty gwarancyjne.
15. Zjawiska, które wykorzystują piece indukcyjne to
a) zjawiska elektromagnetyczne.
b) zjawiska cieplne.
c) zjawisko powstawania prądów wirowych.
d) zjawisko akustyczne.
16. Proces elektrolizy aluminium odbywa się przy napięciu
a) od 0,9 do 2 V.
b) od 4,5 do 5,5 V.
c) około 7 V.
d) około 7,5 V.
17. Jeżeli maszyna prądu stałego pracuje jako silnik, to obowiązuje dla niej następujące
równanie napięć:
a) U = E – R
tc
I
t
.
b) U = E + R
tc
I
t
.
c) E = U + R
tc
I
t
.
d) R = R
a
+ R
k
+ R
p
+ R
sz.
18. Woltomierz o zakresie pomiarowym 100 V i klasie dokładności 1 wskazuje 50 V.
Maksymalny błąd względny pomiaru wynikającego z klasy miernika wynosi
a) 0,5%.
b) 1,0%.
c) 2%.
d) 5%.
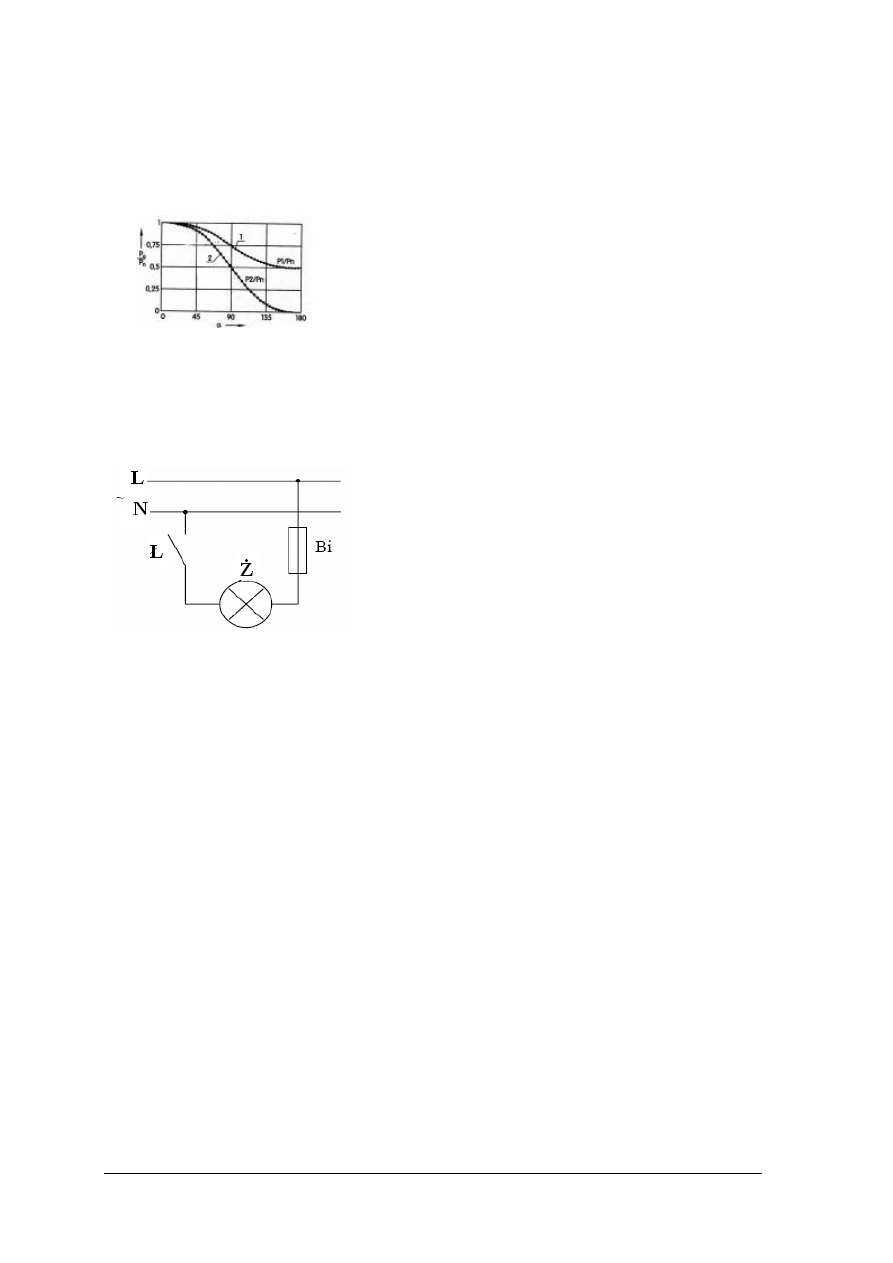
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
19. Rysunek przedstawia
a) charakterystykę biegu jałowego prądnicy obcowzbudnej.
b) charakterystykę sterowania symetrycznego i niesymetrycznego.
c) charakterystykę biegu jałowego prądnicy samowzbudnej.
d) charakterystykę mechaniczną silników.
20. Zaproponowany sposób połączenia źródła światła do obwodu zasilającego jest
a) poprawny i bezpieczny.
b) niepoprawny ze względu na zasadę pracy.
c) niepoprawny ze względu na niebezpieczeństwo eksploatacji.
d) niepoprawny ze względu na brak zabezpieczenia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………..
Analizowanie działania maszyn i urządzeń elektrycznych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
6. LITERATURA
1. Goźlińska E.: Maszyny elektryczne. WSiP Warszawa, 1995
2. Markiewicz H.: Bezpieczeństwo w elektroenergetyce. WNT, Warszawa 2002
3. Marusak A.: Urządzenia elektroniczne część I i II. WSiP Warszawa, 2000
4. Orlik W.: Egzamin kwalifikacyjny elektryka. Wydawnictwo „KaBe”S.C., Krosno 1999
5. Praca zbiorowa – Elektrotechnika i elektronika dla nieelektryków. WNT Warszawa, 1991
6. Praca zbiorowa – Poradnik elektryka. WSiP Warszawa 1999
7. Stein Z.: Maszyny elektryczne dla zasadniczej szkoły. WSiP Warszawa, 1995
8. www.elektroda.pl
Wyszukiwarka
Podobne podstrony:
Analizowanie działania oraz stosowanie podstawowych maszyn i urządzeń elektrycznych
Maszyny i urządzenia elektryczne cw 4
05 Analiza działania podstawowych maszyn i urządzeń
Analizowanie dzialania maszyn i Nieznany
06 Stosowanie maszyn i urządzeń elektrycznych
Maszyny i urzadzenia elektryczne wprowadzenie
11 Eksploatowanie maszyn i urządzeń elektrycznych
cw. 1 systemy napędowe, PWr W9 Energetyka stopień inż, IV Semestr, Maszyny i urządzenia elektryczne,
ćw 13, [W9] ENERGETYKA - SEMESTR IV, MASZYNY I URZĄDZENIA ELEKTRYCZNE - LAB
lotnicze maszyny i urządzenia elektryczne jczr
11 Eksploatowanie maszyn i urządzeń elektrycznych
więcej podobnych podstron