1
Ćw. 7 Pomiary wagowe sił aerodynamicznych.
Siła aerodynamiczna PA jest wyłącznie kombinacją wymienionych wyżej
wielkości. Tworząc z nich bezwymiarowe kryteria podobieństwa:
Wyznaczanie współczynników aerodynamicznych
ρ V
L
Re
=
liczba Reynoldsa
(1)
µ
1. Cel ćwiczenia
V
Celem ćwiczenia jest zaznajomienie się z pomiarami wagowymi sił
M
=
liczba Macha (2)
k T
R
aerodynamicznych i z interpretacją otrzymanych wyników.
możemy zapisać
2
ρ
2. Podstawy teoretyczne
V
P
α β γ
(3)
A
=
f
, , , , S , Re , M
2.1. Siła aerodynamiczna
2
Z punktu widzenia wzajemnego oddziaływania między płynem a opływaną
gdzie:
nim bryłą, jest obojętne czy porusza się ona w nieruchomym ośrodku czy też
V
2
ρ
nieruchome ciało stałe zanurzone jest w jednorodnym strumieniu płynu. Ta q
=
- ciśnienie prędkości przepływu niezakłóconego,
2
zasada leży u podstaw koncepcji prowadzenia doświadczeń aerodynamicznych
w specjalnych tunelach. Tunele takie można wyposażyć w stacjonarne
S - powierzchnia odniesienia.
urządzenia wagowe, które umożliwiają dokładny pomiar siły wywołanej przez
przepływający ośrodek. Nieco odmienne warunki przepływu w tunelu niż w Należy nadmienić, że znajomość modułu siły aerodynamicznej PA nie
warunkach naturalnych (skończony wymiar strumienia tunelowego, jego
wystarcza do opisania jej wielkości wektorowej. W celu opisania tego wektora
turbulencja i zmiany ciśnienia w przestrzeni pomiarowej) można uwzględnić najwygodniej jest skorzystać z układu współrzędnych prostokątnych tak
stosując odpowiednie poprawki. Przenoszenie wyników badań tunelowych na
zorientowanego, aby oś x pokrywała się z kierunkiem prędkości. Czasami dla obiekty w innej skali możliwe jest pod warunkiem spełnienia wymagań
potrzeb konstrukcyjnych korzysta się z układu związanego bezpośrednio z podobieństwa dynamicznego.
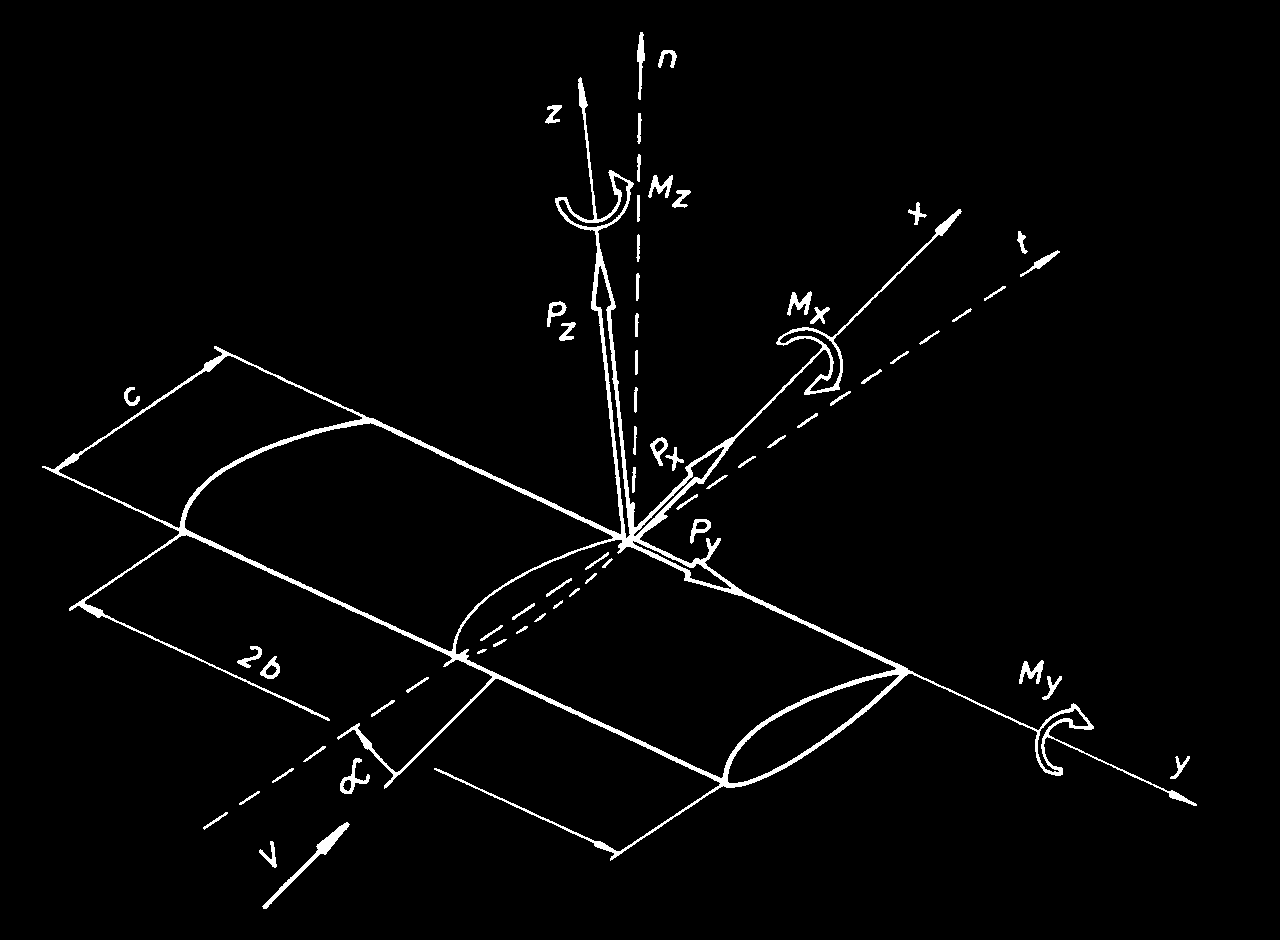
opływaną bryłą ( n,t,y) - rys.1. Na rysunku tym odpowiednie symbole oznaczają:
Z teorii podobieństwa oraz analizy wymiarowej wynika, że w celu określenia
Px - siła oporu (rzut siły aerodynamicznej na kierunek V),
siły
aerodynamicznej
działającej
na
bryłę
opływaną
przez
gaz
Py - siła boczna (rzut siły aerodynamicznej na oś ),
termodynamicznie doskonały i nieprzewodzący ciepła wystarczy znajomość
Pz - siła nośna (rzut siły aerodynamicznej na oś z prostopadłą do V),
następujących danych:
Mx - moment przechylający,
L - wymiar charakteryzujący opływaną bryłę,
α
My - moment pochylający,
, β, γ - kąty określające położenie bryły względem kierunku prędkości,
Mz - moment odchylający,
V - moduł prędkości przepływu niezakłóconego,
2b - rozpiętość płata,
T - temperatura,
c - cięciwa płata,
ρ - gęstość ośrodka,
α - kąt natarcia.
µ - lepkość,
R - stała gazowa,
/cv

2
Jeśli badana bryła ma płaszczyznę symetrii, to układ współrzędnych można tak
usytuować, żeby C
(płaszczyzną symetrii jest wtedy zx).
y
C
=
m x
C
=
m z
0
=
Taki przypadek ma podstawowe znaczenie w badaniach dla potrzeb mechaniki
lotu.
Współczynniki aerodynamiczne, dla ustalonych wartości liczb Re i M, zależą
tylko od kąta natarcia α (kąt między wektorem prędkości i cięciwą).
Zależności te nazywamy charakterystykami aerodynamicznymi płata lub, dla przepływu płaskiego - charakterystykami aerodynamicznymi profilu.
Wartość współczynnika momentu Cm zależy od punktu (lub osi), względem
którego moment określono. Przeliczenie współczynnika momentu Cmo
(określonego względem osi y przechodzącej przez punkt 0 związany z wagą aerodynamiczną) na współczynnik momentu Cmo1 (względem osi y1
przechodzącej przez punkt 01 związany z badanym modelem) dokonuje się
następująco (rys. 2):
M
(5)
1
M
=
o
- P
z x
1
- P
x z
1 ,
gdzie: z
,
1
n
=
o c
o
s γ
+ t
o s
in γ
x
.
1
t
=
o c
o
s γ
- n
o s
in γ
Rys.1 Składowe sił i momenty aerodynamiczne w układ współrzędnych
związanym z modelem
2.2. Współczynniki aerodynamiczne
Siłę aerodynamiczną opisuje się bezwymiarowymi współczynnikami sił i
momentów. Są one zdefiniowane następująco:
Px
Py
Pz
C x
=
,
2
C
y
=
,
2
C
z
=
,
ρ V
ρ V
ρ V
2
S
S
S
2
2
2
(4)
M x
M y
M z
C
m x
=
,
2
C
m y
=
,
2
C
m z
=
.
ρ V
ρ V
ρ V
2
S c
S c
S c
2
2
2
Rys. 2 Układ współrzędnych związany z wagą
3
Stąd po przekształceniach
t
Charakterystyka p (
α ) będzie miała wtedy dwie asymptoty, jedną, gdy C
z =
M
1
=
M
γ
γ
γ
γ
o
- t
o P
(
z c
o
s
+ P
x s
in
)
- n
o P
(
x c
o
s
- P
z s
in
.
)
c
Przechodząc zgodnie z definicją (4) do postaci bezwymiarowej otrzymamy
t p
C
D
0 a drugą dla wartości
o
=
m
. Udowodnić to można przekształcając
T
c
C
d
o
n
z
C
(6)
1
m
C
=
m
γ
γ
γ
γ
o
-
(
o
C
z c
o
s
+ C
x s
in
)
-
(
C
x c
o
s
- C
z s
in
.
)
c
c
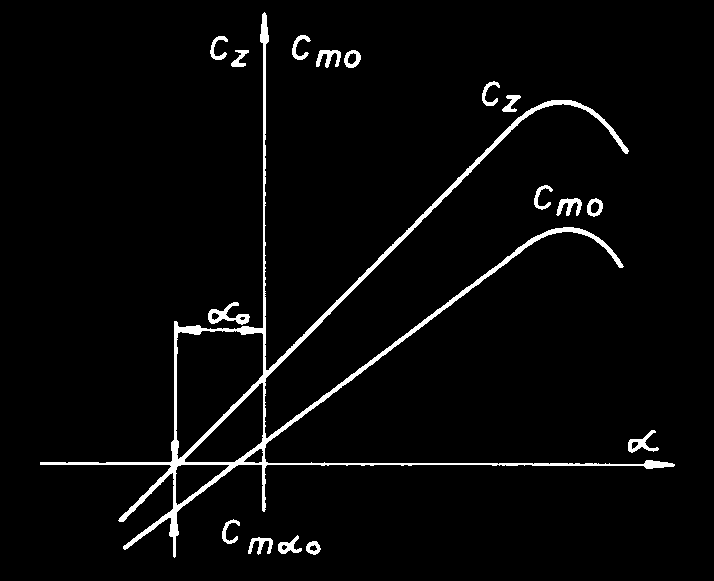
wzór (8) (rys. 3)
C
d
C
+
o
m
α α
o
(
-
α
o)
o
Wykorzystuj
t
m
p
d α
C
ąc zależność (6) można wyznaczyć na modelu pewne
o
m α o
C
d
=
=
+
o
m (9)
charakterystyczne punkty: są to środek parcia i środek aerodynamiczny.
c
C
d z
Cz
C
d
(
α
- αo)
z
d α
2.3. Środek parcia
gdzie α oznacza kąt, dla którego C
.
z
0
=
o
Jest to punkt przecięcia cięciwy modelu z wypadkową siłą aerodynamiczną, tzn. punkt na cięciwie, względem którego moment aerodynamiczny jest równy
zeru. Dla modelu płata wygodnie jest tak dobrać punkt „0” (oś wagi) aby leżał
on na cięciwie a kierunek osi „t” tak, aby pokrywał się z nią. W takim przypadku γ=α, no=0. Równanie (6) dla środka parcia (M=0), przyjmuje
postać (porównaj rys. 2):
T
C
=
0
m
- p
α
α
o
(
C z c
o
s
+ C
x s
in
,
)
c
stąd
t p
C
o
=
m
,
(7)
Rys. 3 Charakterystyki C α i C
m
(
α
o
)
z (
)
c
C
α
α
z c
o
s
+ C
x s
in
d C
gdzie t
o
m
p jest odległością od punktu „0” do środka parcia.
Ponieważ C
w
m
o
/
α
maleje ze wzrostem kąta natarcia, natomiast
o
Cz
C
d
z
zakresie liniowego przebiegu C α i C
ma wartość stałą, zatem
m
(
α
o
)
z (
)
Zmiany wielkości tp/c w zależności od kąta α są jedną z charakterystyk płata
t p
d
zwan
C
ą wędrówką środka parcia. Dla umiarkowanych kątów natarcia tzn. gdy
o
-
m
→
.
dopuszczalne jest założenie, że cosα ≈ 1 oraz sinα ≈ 0, położenie środka c
C
d z
parcia w uproszczeniu można wyznaczyć z zależności
t
Dla profilu symetrycznego p ma wartość stałą i nie zależy od α (środek t p
C
c
o
=
m .
(8)
c
C
parcia nie zmienia swego położenia).
z
Charakterystyki Cz(α) i Cmo(α) dla większości spotykanych profili lotniczych,
w zakresie umiarkowanych kątów natarcia mają przebieg liniowy.
Istnieją także profile niesymetryczne, tzw. profile samostateczne, dla których środek parcia zmienia swoje położenie odwrotnie niż w profilach klasycznych.

4
Na rys. 4 zobrazowano zmiany wielkości, położenia i kierunku wypadkowej d C
1
m
d
C
o
m
tA
C
d z
C
d x
=
α
α
α
α
siły aerodynamicznej wraz ze zmianami k
-
c
os
C
-
z s
in
+
s
in
C
+
z c
os
+
ąta natarcia, dla trzech typów profili:
d α
d α
c
d α
d α
a) symetrycznego, b) niesymetrycznego, c) samostatecznego.
n
A
C
d x
C
d
+
c
os
z
α C
-
α
α
α
x s
in -
s
in
C
-
z c
os
,
0
=
c
d α
d α
(10)
d C
Przy
spełnieniu
warunku,
że
1
m
0
=
d α
,
współrzędnymi
środka
aerodynamicznego są t i
.
A
nA
Znając charakterystyki C α i C α można określić wielkości wchodzące x (
)
z (
)
do wzoru (10) dla dwu kątów natarcia α i rozwiązać układ równań względem
t A
n
i A . Układ równań uprości się, jeśli jako jeden z kątów przyjmiemy kąt c
c
d C
natarcia, dla którego
x
C
(wtedy
0
=
x
C
=
x min
d α
).
Przybliżone położenie środka aerodynamicznego można wyznaczyć,
Rys. 4 Wędrówka środka parcia: a) profil symetryczny, b) profil
zakładając, że n
, oraz że co
s α
≈ 1
i sin α
≈ 0
. Otrzymamy
A
0
=
niesymetryczny, c) profil samostateczny
wówczas z równania (10)
d C
o
m
2.4. Środek aerodynamiczny
ta
d α
C
d
=
=
o
m
.
(11)
c
C
d z
C
d z
Środkiem aerodynamicznym nazywamy taki punkt A na modelu, względem d α
którego moment aerodynamiczny jest stały, niezależnie od kąta natarcia (w Dla większości profili środek aerodynamiczny leży w odległości ok. 25%
zakresie liniowego przebiegu C α i C
α ). Znajomość położenia tego
cięciwy od noska. Z analizy pełnego równania (10) wynika, że nawet dla m (
)
z (
)
punktu ma duże znaczenie w badaniach stateczności samolotu, gdyż jest to symetrycznego profilu n ≠ , ze względu na nieliniową zależność C α .
x (
)
A
0
punkt
równowagi
obojętnej.
Dla
układu
odniesienia
„ t , n
”
tak
zorientowanego, że γ
α
=
, można napisać na podstawie wzoru (6)
3. Stanowisko pomiarowe
Ćwiczenie wykonujemy w tunelu nr 1 Zakładu Aerodynamiki o średnicy
przestrzeni pomiarowej 1,16 m. Tunel wyposażony jest w wagę

5
Witoszyńskiego (tzw. waga typu JAW). Aksonometryczny schemat wagi
b) moment względem pionowej osi wagi, czyli moment M
.
y o
przedstawiono na rys. 5.
Mocno napięte druty mocujące model do ramy przenoszą na nią wszystkie siły
występujące na modelu. Rama zamocowana jest obrotowo. Przez pokręcenie
ślimaka F można ustawić ją wraz z modelem pod różnymi kątami względem osi tunelu (±30°). Konstrukcja wagi umożliwia wreszcie swobodę obrotu całej
ramy wraz z zamocowanym modelem - alternatywnie względem dowolnej z
trzech prostopadłych osi. Uzyskuje się to przez wybór odpowiedniej pary sworzni S S i zwolnienie pozostałych. Siła, względnie moment działający na model, zostaje za pomocą układu dźwigni dwuramiennych przeniesiona na
tensometryczny przetwornik siły i równolegle z nim na wagę szalkową służącą
do szybkiego wzorcowania siłomierza (przetwornika). Chcąc mierzyć siłę
nośną, wkręca się sworznie S o osi równoległej do kierunku przepływu i z
łączy drążkiem H rurę E , stanowiącą przedłużenie ramy C , z wagą znajdującą się w płaszczyźnie prostopadłej do osi tunelu. W celu pomiaru siły
oporu, wkręca się poziome sworznie S o osi prostopadłej do osi tunelu a siłę, x
potrzebną do utrzymania wagi w położeniu niewychylonym, mierzy się
siłomierzem związanym z wagą równoległą do osi tunelu.
Podczas pomiaru momentu pracują sworznie pionowe S i przetwornik ten m
sam co do pomiaru siły oporu. Pomiar momentu możliwy jest dzięki temu, że
drążek H połączony został z ramą wagi mimośrodowo względem sworzni S , co pozwala zmierzyć siłę potrzebną do utrzymania wagi w określonym m
położeniu zależnie od działającego na model momentu. Przy wszelkich
manipulacjach sworzniami należy uważać, aby najpierw wkręcić sworznie
wchodzące do użytku a dopiero potem wykręcać poprzednio używane. W
przeciwnym przypadku rama wagi spadnie i może ulec uszkodzeniu. Momenty
z ramy C na rurę E przenoszone są poprzez samohamowną ślimakową przekładnię F , która także służy do zmiany kąta natarcia modelu. Kąt natarcia może być zmieniany ręcznie lub za pomocą silniczka elektrycznego zdalnie Rys. 5 Schemat wagi aerodynamicznej
sterowanego.
Badany model zawieszony jest na drutach na ramie obejmującej całą
przestrzeń pomiarową. Cięciwa modelu przy zerowym kącie natarcia pokrywa
się z osią tunelu, natomiast wymiar poprzeczny (rozpiętość) modelu
Kąt natarcia odczytywany jest na skali kątowej znajdującej się na rurze E lub zorientowany jest pionowo. Oś ramy wagi powinna leżeć dokładnie w
zdalnie za pomocą potencjometrycznego przetwornika. Jak wynika z
płaszczyźnie symetrii modelu (
x z) , gdyż tylko w takim przypadku znamy jej
powyższego opisu, waga ta, mimo bardzo prostej konstrukcji, umożliwia
oddzielne pomiary (ręczne albo automatyczne, z wykorzystaniem techniki
przełożenie. Przy takim zawieszeniu modelu pomiarami objęte są następujące
analogowej lub analogowo cyfrowej, w zależności od zastosowanego
wielkości:
dodatkowego wyposażenia) trzech składowych siły aerodynamicznej. Nie
a) składowe poziome siły działającej na model, czyli siła nośna i siła oporu,
6
nadaje się ona jednak do pomiarów jednoczesnych wszystkich trzech
utrzymywać jak poprzednio. Tłumik pulsacji przy pomiarze się X i Z
składowych.
powinien być ustawiony w położeniu „3” a przy pomiarze „ M ” w Pomierzone siły aerodynamiczne są wielkościami brutto. Należy je
położeniu „7”.
skorygować, odejmując od nich tarę wagi oraz siłę lub moment działającą na
Uwagi i ostrzeżenia
układ drutów mocujących model. Poprawki na druty, dla każdego ich układu i
standardowego ciśnienia dynamicznego q , podawane są w formie tablicy lub 1. Przy wszystkich czynnościach wymagających dotknięcia elementów
wykresu. Wykonując pomiary przy innych prędkościach przepływu poprawki
ruchomych wagi należy koniecznie blokować siłomierze tensometryczne.
na druty przelicza się proporcjonalnie do ciśnień dynamicznych. Tara wagi 2. Dopuszczalne obciążenia wynoszą odpowiednio: siłomierz „ Z ” do 200 N, wynika z faktu, że odpowiednie osie wagi nie pokrywają się ze środkiem siłomierze „ X ” i „ M ” 100 N.
ciężkości wagi oraz modelu. Tara wagi zależy od kąta natarcia. Wielkość tary
wyznaczamy dokonując pomiaru się i momentów bez włączania tunelu (bez
Jeśli siły aerodynamiczne przekraczają te wartości można dokonać
przepływu).
pomiarów, odciążając siłomierze za pomocą odważników kładzionych na
odpowiednie szalki.
3. Dopuszczalny zakres kątów natarcia wynosi tylko ±30°. Przekroczenie tych
4. Wykonanie ćwiczenia
wartości grozi uszkodzeniem wagi. W związku z tym, że waga nie ma
zabezpieczeń przed przekroczeniem dopuszczalnych kątów wychylenia,
Pomiaru sił dokonujemy z automatyczną, cyfrową rejestracją i obróbką danych
podczas automatycznej zmiany kąta natarcia należy obserwować wagę i w
poszczególnych składowych siły aerodynamicznej.
porę wyłączyć silnik zmiany kąta natarcia.
4. Przy zmianie sworzni należy pamiętać, że najpierw trzeba wsunąć te, które
Dla wybrane składowej aerodynamicznej należy:
będą używane a dopiero potem usunąć te, które były użyte poprzednio.
a) ustawić ramę wagi tak, aby kąt natarcia modelu wyniósł α
0
=
° ,
5. Aby otrzymać na rejestratorze XY prawidłowy wykres momentu
b) odblokowa
aerodynamicznego, zgodny z wy
ć siłomierz tensometryczny,
żej podaną konwencją znaków trzeba
zmienić polaryzację rejestratora w stosunku do tej, która była używana przy
c) wyzerować mostek tensometryczny,
pomiarze siły X .
d) wyskalować siłomierz tensometryczny używając do tego odważników.
6. Podczas pomiarów aerodynamicznych należy cały czas obserwować na
Wzmocnienie mostka należy dobrać tak, aby dla składowej „ Z ” masie 10
manometrze ciśnienie wskaźnika tunelu. Wszelkie jego zmiany powinny
kg na szalce odpowiadało 0,5 V na wyjściu z mostka, a dla składowej „ X ”
być natychmiast kompensowane.
i „ M ” odpowiednio 5 kg - 0,5 V,
e) wykonać pomiar tary wagi dla składowych X i Z w funkcji kąta natarcia.
W tym celu należy, po cofnięciu wagi do skrajnego położenia kątowego
4.1. Obliczenia współczynników aerodynamicznych
uruchomić automatyczną zmianę kąta natarcia i rejestrator „ X Y
”. Tempo
zmiany kąta natarcia nie powinno być większe niż 0,5°/s. Pomiar tary „ M ”
1. Siły netto mierzone na wadze obliczane są ze wzorów:
jest zbędny, gdyż nie zależy ona od kąta α , a więc można ją uwzględnić na
X
=
Z
,
B
- ZT
- Z D
drodze zerowania mostka tensometrycznego,
X
=
X
,
B
- X T
- X
f) cofn
D
ąć wagę do położenia początkowego, następnie uruchomić wentylator
tunelu i po osiągnięciu założonego ciśnienia wskaźnika tunelowego
M
=
M
,
B
- M T
- M D
włączyć silnik zmiany kąta natarcia i rejestrator. Tempo zmian kąta natarcia
gdzie: Z
- siły brutto będące funkcją kąta α ,
B
, X
B
, M
B
7
Z
- odpowiednie tary wagi, przy czym
i
są
T
, X T , M
T
ZT
X T
funkcją kąta natarcia, natomiast M jest staże,
T
Z
- poprawki na druty podane w formie wykresu lub tablic.
D
, X
D
, M
D
2. Składowe siły aerodynamicznej działającej na model oblicza się
uwzględniając przełożenia wagi. Są one odpowiednio równe
P
z
=
Z i z Px
=
X i x ,
gdzie:
i i
= 1,012 - jest to przełożenie mechanizmu wagi.
z
ix
Moment aerodynamiczny zaś równy jest
M
o
M
=
r
i m .
Dla wagi używanej w ćwiczeniu r
0
=
,196 m
a przełożenie i
.
m
1
=
,503
Odpowiednie współczynniki aerodynamiczne wynoszą:
Pz
Px
M
C
z
=
,
2
C
x
=
,
2
C
m
=
o
o
.
ρ V
ρ V
ρ V
2
S
S
c
S
2
2
2
3. Obliczenia wędrówki środka parcia wykonuje się wg wzoru (7) lub (8).
4. Położenie środka aerodynamicznego wyznacza się wg wzoru (11).
Sprawozdanie winno zawierać:
1. Protokół pomiarowy z wykresami otrzymanymi na rejestratorze.
2. Wykresy charakterystyk C α , C α C
, C
mo
(α)
mo (α )
x (
),
z (
)
0 2
. 5 c
3. Biegunową C
modelu z zaznaczeniem kątów natarcia jako
z (
C x )
parametrów tego wykresu.
4. Wykres
C
z ( α ) .
C x
t
5. Wykres wędrówki środka parcia
=
e
p z zaznaczeniem obu asymptot.
c
Wyszukiwarka
Podobne podstrony:
ćw 4 Profil podłużny cieku
biofiza cw 31
Kinezyterapia ćw synergistyczne
Cw 1 ! komorki
Pedagogika ćw Dydaktyka
Cw 3 patologie wybrane aspekty
Cw 7 IMMUNOLOGIA TRANSPLANTACYJNA
Cw Ancyl strong
Cw 1 Zdrowie i choroba 2009
Rehabilitacja medyczna prezentacja ćw I
ćw 2b
Ćw 3 Elektorforeza Bzducha
ćw 3 Projektowanie drenowania
ćw 3 dla studentów
więcej podobnych podstron