1
ĆWICZENIE 4
AKWIZYCJA SYGNAŁÓW POMIAROWYCH
4.1. Wstęp
Zadaniem bloku akwizycji sygnałów pomiarowych jest zbieranie sygnałów pomiarowych i przetwarzanie ich
na postać cyfrową. Najczęściej w układach pomiarowych stosuje się przetwarzanie napięcie-cyfra. Czasami, gdy
mierzona wielkość związana jest z czasem (np. pomiar odcinka czasu, częstotliwości, okresu), stosowane jest
przetwarzanie czas-cyfra.
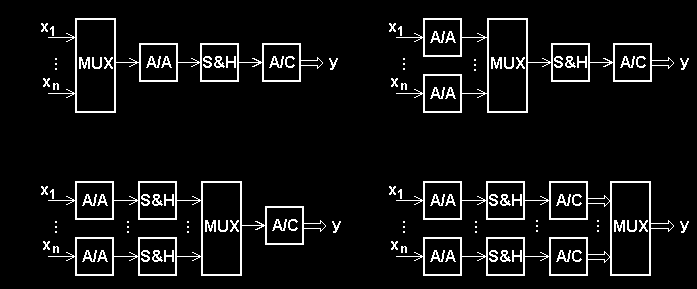
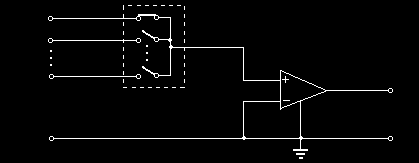
Na rys. 4.1 przedstawione są podstawowe konfiguracje bloku akwizycji sygnałów pomiarowych. W skład tego
bloku wchodzą przełączniki kanałów, układy formujące, układy próbkująco-pamiętające i przetworniki analogowo-
cyfrowe.
a)
b)
c)
d)
Rys. 4.1. Podstawowe konfiguracje bloku akwizycji sygnałów pomiarowych;
MUX - przełącznik kanałów, A/A - układ formujący, S&H - układ próbkująco-pamiętający,
A/C - przetwornik analogowo-cyfrowy
Przełącznik kanałów (MUX) służy do przyłączenia do wyjścia jednego z kanałów wejściowych, w zależności
od stanu sygnału sterującego.
Zadaniem układu formującego (A/A) jest wstępna obróbka i normalizacja sygnału wejściowego
(kondycjonowanie sygnału). Jako układy formujące stosuje się m.in. wtórniki napięciowe, wzmacniacze, filtry
dolnoprzepustowe.
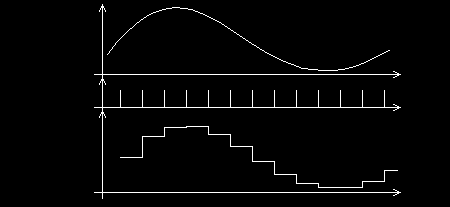
Układ próbkująco-pamiętający (S&H) służy do pobrania próbki napięcia wejściowego i zapamiętania jej na
określony czas. Zasada działania przedstawiona jest na rys. 4.2.
U wej
t
impulsy
próbkujące
t
U wyj
t
Rys. 4.2. Zasada działania układu próbkująco-pamiętającego
Układy S&H stosuje się, gdy szybkość zmian mierzonego napięcia jest większa od dopuszczalnej dla
przetwornika analogowo-cyfrowego. Układ zabezpiecza przed błędami, jakie mogą wystąpić, gdy w trakcie
przetwarzania analogowo-cyfrowego zmienia się napięcie na wejściu przetwornika.
Głównym elementem układu akwizycji sygnałów pomiarowych jest przetwornik analogowo-cyfrowy.
Zachodzi w nim konwersja sygnału analogowego na kod cyfrowy. W zależności od wymagań dotyczących
rozdzielczości, dokładności i szybkości stosuje się różne metody przetwarzania analogowo-cyfrowego, np.
z równoczesną komparacją (duża szybkość), z komparacją wagową, przetworniki integracyjne (wolniejsze, ale
większa rozdzielczość i odporność na zakłócenia o częstotliwości technicznej, a tym samym i dokładność), czy
spotykane obecnie najczęściej w układach akwizycji przetworniki nadpróbkujące (sigma-delta).
2
Wybór konfiguracji układu akwizycji sygnałów pomiarowych uzależniony jest od wymagań stawianych temu
układowi. Konfiguracja z rys. 4.1a jest najtańsza, najwięcej elementów jest wspólnych dla wszystkich kanałów.
Ponieważ wstępna obróbka sygnału wykonywana jest za przełącznikiem kanałów, konfiguracja może być
stosowana w przypadku sygnałów o takiej samej postaci i zbliżonym poziomie, np. pomiar sygnału z jednakowych
przetworników. W konfiguracji tej stosowane jest sekwencyjne zbieranie sygnałów (z rozdziałem czasowym), nie
może być więc wykorzystywana, gdy wymagane jest jednoczesne zbieranie sygnałów z kilku kanałów.
W konfiguracji na rys. 4.1b każdy kanał posiada własny układ formujący, dlatego konfiguracja ta może być
wykorzystana przy różnych postaciach sygnałów wejściowych w różnych kanałach. Również tutaj występuje
sekwencyjne zbieranie sygnałów.
W konfiguracjach na rys. 4.1c i 4.1d w torze przetwarzania występuje mniej wspólnych elementów. Ponieważ
w każdym kanale jest własny układ próbkująco-pamiętający, możliwe jest jednoczesne zbieranie sygnałów w wielu
kanałach. W konfiguracji na rys. 4.1d wykorzystywany jest cyfrowy przełącznik kanałów, dzięki czemu występują
mniejsze błędy niż w przypadku zastosowania przełącznika analogowego. Wiąże się to jednak z koniecznością
zastosowania własnego przetwornika analogowo-cyfrowego w każdym kanale.
Układy akwizycji sygnałów pomiarowych wykonywane są często w postaci modułów (kart pomiarowych),
które można umieścić bezpośrednio w komputerze. Karty takie zwykle wyposażone są dodatkowo w przetworniki
cyfrowo-analogowe (umożliwiające np. rekonstrukcję mierzonego sygnału lub generację wymuszeń), wejścia
i wyjścia cyfrowe oraz układy czasowo-częstotliwościowe.
4.2. Właściwości kart pomiarowych
4.2.1. Częstotliwość próbkowania
Ważnym parametrem karty pomiarowej jest częstotliwość próbkowania wejścia analogowego ( sampling rate).
Do pomiaru sygnału o dużej częstotliwości należy wykorzystać kartę pomiarową o dużej maksymalnej
częstotliwości próbkowania. Obecnie produkowane karty pomiarowe posiadają maksymalną częstotliwość
próbkowania od kilkudziesięciu kiloherców do kilku megaherców. Częstotliwość próbkowania określa, ile próbek
jest pobieranych w jednostce czasu.
Podawana przez producentów maksymalna częstotliwość próbkowania odnosi się do jednego kanału.
Wykonując pomiar w kilku kanałach, otrzymamy maksymalną częstotliwość próbkowania proporcjonalnie
mniejszą. Przykładowo dla karty o maksymalnej częstotliwości próbkowania 100 kHz, przy wykorzystaniu
czterech kanałów częstotliwość ta zmniejsza się do 25 kHz.
Jeżeli w próbkowanym sygnale występują składowe o częstotliwości większej od połowy częstotliwości
próbkowania fs, to część mocy z pasma powyżej fs/ 2 zostaje „przesunięta” do zakresu częstotliwości mniejszych od fs/ 2. W rezultacie składowe te nałożą się na składowe występujące wcześniej w tym zakresie, powodując
deformację kształtu mierzonego sygnału.
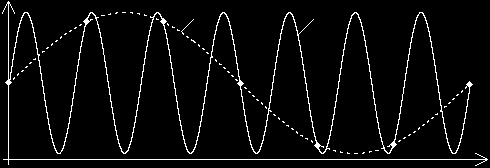
Jeżeli w wyniku próbkowania z częstotliwością fs częstotliwość mierzonego sygnału została zinterpretowana
jako f (0 < f < fs/ 2), to przy nieodpowiednio dobranej częstotliwości próbkowania nie jesteśmy w stanie określić, czy mierzony sygnał miał rzeczywiście częstotliwość f, czy częstotliwość większą: fs ± f, 2 fs ± f, ... , nfs ± f (gdzie n jest liczbą naturalną) (rys. 4.3).
b
a
U
t
Rys. 4.3. Zjawisko nakładania się widm przy próbkowaniu z częstotliwością fs = 6 kHz:
a - sygnał mierzony o częstotliwości f = 7 kHz, b - sygnał odtworzony o błędnie zinterpretowanej częstotliwości fs – f =1 kHz Zgodnie z twierdzeniem Shannona-Kotielnikowa dla uniknięcia zjawiska nakładania się widm (ang. aliasing)
częstotliwość próbkowania musi być co najmniej dwa razy większa od maksymalnej częstotliwości występującej
w mierzonym sygnale.
Jeżeli częstotliwości składowych występujących w mierzonym sygnale są większe od częstotliwości
próbkowania, należy zastosować filtr dolnoprzepustowy.

3
4.2.2. Typy wejść
Sygnały analogowe można podłączyć do wejścia karty pomiarowej w układzie symetrycznym (różnicowym)
lub niesymetrycznym.
Wejścia symetryczne stosowane są w przypadku, gdy sygnały wejściowe spełniają przynajmniej jeden
z warunków:
• mały poziom sygnału wejściowego (poniżej 1V),
• długie lub nieekranowane przewody połączeniowe,
• przewody połączeniowe są narażone na indukowanie się w nich zakłóceń,
• sygnały wejściowe mają oddzielne masy.
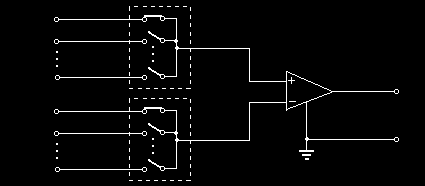
Dla wejścia symetrycznego każdy sygnał wykorzystuje dwa wejścia przełącznika kanałów (rys. 4.4). Z tego
powodu liczba dostępnych wejść jest dwa razy mniejsza niż w przypadku używania wejść niesymetrycznych.
Wej 1 +
Wej 2 +
Wej n +
Wej 1 -
Um
Wej 2 -
Wej n -
Rys. 4.4. Wejście symetryczne karty pomiarowej
W przypadku wejść niesymetrycznych wszystkie sygnały wejściowe odniesione są względem jednej wspólnej
masy. Wejścia niesymetryczne mogą być stosowane, gdy wszystkie sygnały spełniają następujące warunki:
• napięcie wejściowe jest nie mniejsze niż 1 V,
• przewody połączeniowe są krótkie i ekranowane,
• wszystkie sygnały wejściowe mogą mieć wspólną masę.
Wej 1
Wej 2
Wej n
Um
Rys. 4.5. Wejście niesymetryczne przy dołączeniu sygnałów ze źródeł nie połączonych z masą
Rys. 4.5 przedstawia wejście niesymetryczne przy dołączeniu sygnałów ze źródeł nie połączonych z masą (np.
wyjście transformatora, czujnika termoelektrycznego, wzmacniacza z izolacją galwaniczną). Połączenie z masą
w takim przypadku musi być wykonane na karcie pomiarowej.
Wej 1
Wej 2
Wej n
Um
Rys. 4.6. Wejście niesymetryczne przy dołączeniu sygnałów ze źródeł połączonych z masą
Rys. 4.6 przedstawia wejście niesymetryczne w przypadku dołączenia sygnałów z drugim przewodem
połączonym do wspólnej masy. W tej sytuacji różnica potencjałów między masą sygnału i masą wzmacniacza
pojawia się zarówno na wejściu odwracającym, jak i nieodwracającym wzmacniacza. Dzięki temu nie wpływa ona
na wyjście wzmacniacza, w przeciwieństwie do układu, w którym do masy połączone jest jedno z wejść
wzmacniacza.

4
4.2.3. Rozdzielczość i zakres
Rozdzielczość przetwornika analogowo-cyfrowego jest to liczba stanów wyjściowych wyrażona w bitach.
Czym większa rozdzielczość, tym zakres przetwarzania podzielony jest na więcej poziomów. Liczba stanów
wyjściowych wynosi 2 n, gdzie n jest liczbą bitów.
Stosowane w kartach pomiarowych przetworniki analogowo-cyfrowe posiadają zwykle rozdzielczość od 12
do 16 bitów. Przetwornik 12-bitowy dzieli zakres pomiarowy na 212 = 4096 poziomów (słowa kodowe od
000000000000 do 111111111111).
Zakres przetwornika określa minimalne i maksymalne napięcie, jakie może być przetworzone. Karty
pomiarowe dają zwykle możliwość wyboru zakresu, np.: -5...+5 V, -10...+10 V, 0...+10 V. Zmianę zakresu
wykonuje się przełączając przełączniki lub zwory na karcie, lub w nowszych typach kart posługując się programem
konfiguracyjnym.
Od zakresu i rozdzielczości zależy przedział kwantowania, tzn. różnica między dwoma sąsiednimi poziomami
progowymi. Dla przetwornika 12-bitowego na zakresie 0...+10 V lub -5...+5 V przedział kwantowania wynosi
10 V / 212 = 2,44 mV, a na zakresie 0...+5 V lub -2,5...+2,5 V wynosi 5 V / 212 = 1,22 mV.
Z procesu kwantowania wynika błąd kwantowania, którego wartość bezwzględna jest nie większa niż połowa
przedziału kwantowania.
Zakres powinien być dobrany tak, by zmiany mierzonej wielkości nie były większe od zakresu, ale z drugiej
strony, ze względu na błąd kwantowania, powinien być możliwie mały. Wybór zakresu zależy też od tego, czy
mierzymy sygnał unipolarny (np. 0...+5V) czy bipolarny (np. -5...+5V).
4.2.4. Błędy przetwornika analogowo-cyfrowego
W idealnej charakterystyce przetwarzania przetwornika analogowo-cyfrowego uwzględniony jest jedynie błąd
kwantowania. W rzeczywistości występują dodatkowe błędy, przez co rzeczywista charakterystyka przetwornika
może różnić się od idealnej. Błędy przetwornika analogowo-cyfrowego (przy pominięciu błędu kwantowania)
można podzielić na 3 grupy: błędy przesunięcia zera, błędy skalowania (wzmocnienia) i błędy nieliniowości
(rys. 4.7).
a) b) c)
N
N
N
charakterystyka
idealna
charakterystyka
rzeczywista
Uwej
Uwej
Uwej
Rys. 4.7. Błędy przetwornika analogowo-cyfrowego:
a) błąd przesunięcia zera, b) błąd skalowania, c) błąd nieliniowości
Błąd przesunięcia zera odpowiada wartości sygnału na wejściu przy zerowym sygnale wyjściowym. Błąd ten
spowodowany jest napięciami dryftu wynikającymi ze starzenia lub zmian temperatury we wzmacniaczach
i komparatorach. Błąd przesunięcia zera będąc błędem addytywnym powoduje przesunięcie charakterystyki. Jego
wpływ jest szczególnie znaczący przy małych wartościach napięcia wejściowego.
Błąd skalowania odpowiada nachyleniu charakterystyki rzeczywistej względem idealnej. Błąd ten
spowodowany jest zmianami wzmocnienia wzmacniacza lub napięcia wzorcowego, powodującymi zmianę
stromości charakterystyki przetwarzania. Błąd skalowania jest błędem multiplikatywnym.
Błąd nieliniowości określa się jako maksymalną różnicę między charakterystyką rzeczywistą i idealną, przy
założeniu, że błędy przesunięcia zera i skalowania są równe zero.
Wyznaczając całkowity błąd pomiaru przy użyciu karty akwizycji należy uwzględnić podawane w katalogach
dla danego zakresu pomiarowego składowe: błąd części analogowej toru pomiarowego określany w procentach
wartości mierzonej, błąd przesunięcie zera, błąd wynikający z szumu i kwantowania oraz błąd wynikający ze
zmiany temperatury. Błąd wynikający z szumu i kwantowania przy pomiarze napięcia stałego może być
ograniczony przez wykonanie serii pomiarów i obliczenie wartości średniej.
4.2.5. Bezpośredni dostęp do pamięci
Bezpośredni dostęp do pamięci (DMA - Direct Memory Access) polega na przesyłaniu danych bezpośrednio
z urządzenia (np. karty pomiarowej) do pamięci komputera lub z pamięci do urządzenia, bez pośrednictwa
procesora. Metoda ta umożliwia szybsze przesyłanie danych, dzięki czemu można np. wykonywać pomiary z dużą
częstotliwością.

5
5. Transmisja danych pomiarowych z wykorzystaniem interfejsów szeregowych
5.1. Interfejsy szeregowe RS-232 i RS-485
Standard RS-232 został określony w 1962 roku, a w 1969 ustalono jego poprawioną wersję RS-232C.
Najczęściej stosowanym sposobem transmisji przy wykorzystaniu tego interfejsu jest transmisja start-
stopowa, w której słowa w postaci ciągu bitów przesyłane są asynchronicznie, jeden za drugim, z czasem trwania
wynikającym z prędkości transmisji.
Na liniach danych obowiązuje logika ujemna, tzn. jedynce logicznej odpowiada stan niski, na pozostałych
liniach obowiązuje logika dodatnia. Stanowi niskiemu odpowiada napięcie -15...-3 V, wysokiemu 3...15 V.
Między przesyłanymi danymi na linii występuje stan niski (logiczne „1”). Przesyłanie danych rozpoczyna się
bitem startu o poziomie logicznym „0”. Po narastającym zboczu bitu startu odbiornik odczytuje stany wszystkich
spodziewanych bitów danego słowa z przesunięciem o czas trwania przesłania połowy bitu. Po bicie startu
przesyłanych jest od 5 do 8 bitów danych (począwszy od bitu najmniej znaczącego), a po nim może być (ale nie
musi) przesłany bit kontrolny (kontrola parzystości lub nieparzystości). Przesłanie słowa kończy się przesłaniem
jednego lub dwóch bitów stopu o poziomie logicznym „1”. Po odebraniu bitów stopu odbiornik gotowy jest do
odebrania kolejnego słowa.
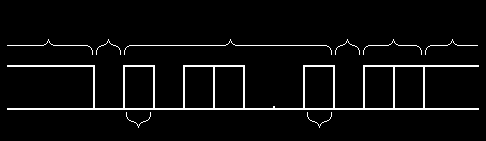
bit kontroli 1 lub 2
przerwa
przerwa
bit
parzystości
bity
między
między
startu
5 do 8 bitów danych
(opcjonalnie) stopu
słowami
najmniej znaczący bit
najbardziej znaczący bit
Rys. 5.1. Przykładowy format przesyłanego słowa
Dla prawidłowego odbioru informacji nadajnik i odbiornik muszą pracować z tą samą prędkością. Odbiornik
musi znać również format przesyłanego słowa, tzn. liczbę bitów danych, występowanie i znaczenie bitu
kontrolnego ( even parity - kontrola parzystości lub odd parity - kontrola nieparzystości) oraz liczbę bitów stopu.
Maksymalna prędkość transmisji zależy od długości połączeń i pojemności elektrycznej obciążającej źródło
sygnału (CLmax=2500 pF). Zalecane są prędkości do 20 kbodów (kbitów/s), m.in.: 150, 300, 600, 1200, 2400, 4800,
9600, 19200 bodów. Długość połączeń nie powinna zwykle przekraczać 15 m. Przy krótkich połączeniach można
z powodzeniem zwiększyć prędkość transmisji nawet do 100 kbodów.
Zwiększenie zasięgu ponad 15 m możliwe jest przy zastosowaniu tzw. pętli prądowej.
W przypadku, gdy wymagany jest większy zasięg, większa szybkość transmisji i większa odporność na
zakłócenia, można zastosować inny interfejs szeregowy. Do popularniejszych należą: RS-422A, RS-423A
i RS-485. Używają one organizację logiczną przesyłanych znaków, taką jak w RS-232C, różnią się natomiast
realizacją obwodów interfejsu i parametrami elektrycznymi.
Obwód transmisyjny interfejsu RS-423A składa się (rys. 5.2) z niesymetrycznego nadajnika i różnicowych
odbiorników (maksymalnie 10 odbiorników).
nadajnik
odbiorniki
Rys. 5.2. Obwód interfejsu RS-423A
Różnicowe obciążenie pozwala zmniejszyć przesłuchy między kanałami oraz wpływ napięcia wynikającego
z różnicy potencjałów masy nadajnika i odbiornika. Maksymalna szybkość transmisji wynosi 100 kbodów przy
odległości do 30 m, przy odległości 1200 m szybkość ulega ograniczeniu do 3 kbodów.
6
Znaczne zwiększenie szybkości transmisji w interfejsie szeregowym umożliwia wykorzystanie
symetrycznego, zrównoważonego obwodu transmisji, tzn. takiego, w którym obydwa przewody mają taką samą
impedancję do ziemi i do innych przewodów.
Zastosowanie w standardach RS-422A i RS-485 różnicowego nadajnika, dwuprzewodowego
zrównoważonego obwodu transmisji i różnicowego odbiornika pozwala zwiększyć szybkość transmisji nawet do
10 Mbodów. Maksymalna długość kabla wynosi tutaj 1200 m.
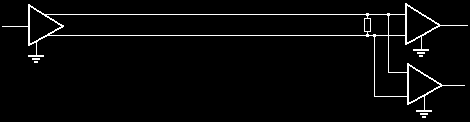
Standard RS-422A (rys. 5.3) pozwala wykorzystać jeden nadajnik i maksymalnie 10 odbiorników.
rezystor
nadajnik
odbiorniki
dopasowujący
Rys. 5.3. Obwód interfejsu RS-422A
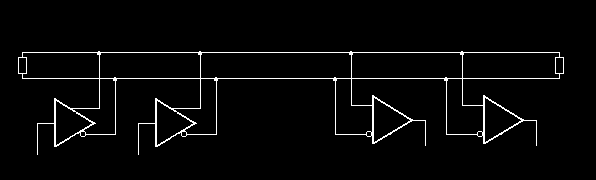
W interfejsie RS-485 (rys. 5.4), stanowiącym rozwinięcie standardu RS-422A, dopuszcza się połączenie do 32
nadajników i do 32 odbiorników. Jest to możliwe dzięki zastosowaniu urządzeń trójstanowych. W danej chwili
może nadawać tylko jeden nadajnik, pozostałe muszą być w stanie wysokiej impedancji.
rezystor
rezystor
dopasowujący
dopasowujący
nadajniki
odbiorniki
Rys. 5.4. Obwód interfejsu RS-485
5.2. Obsługa miernika PROTEK 506
Miernik PROTEK 506 jest cyfrowym wielofunkcyjnym multimetrem. Miernik ten posiada wbudowany
interfejs RS-232C. PROTEK 506 umożliwia pomiar napięcia, prądu, częstotliwości, rezystancji, pojemności,
indukcyjności i temperatury. Wybór mierzonej wielkości dokonywany jest przełącznikiem obrotowym.
Tablica 5.1
Format danych i liczba słów przesyłanej informacji z miernika PROTEK 506
Funkcja Format danych
Liczba
Funkcja
Format danych
Liczba
słów
słów
DC 3.999 V↵
11
RES 3.999 MOHM↵
15
DC V
DC -3.999 V↵
12
RESISTANCE
RES 399.9 OHM↵
14
DC OL↵
6
RES OL↵
7
AC V
AC 3.999 V↵
11
CONTINUITY
BUZ SHORT↵
10
AC OL↵
6
BUZ OPEN↵
9
DC mV DC 399.9 mV↵
12
DIO OPEN↵
9
DC -399.9 mV↵
13
DIODE
DIO SHORT↵
10
AC mV AC 399.9 mV↵
12
DIO GOOD↵
9
DC µA DC 399.9 µA↵
12
LOG LOW↵
8
DC -399.9 µA↵
13
LOGIC
LOG HIGH↵
9
AC µA AC 399.9 µA↵
12
LOG UNDET↵
10
DC mA DC 399.9 mA↵
12
FREQUENCY
FR 9.999 MHz↵
13
DC -399.9 mA↵
13
FR 9.999 KHz↵
13
AC mA AC 399.9 mA↵
12
CAPACITANCE
CAP 99.99 µF↵
13
DC 20A DC 39.99 A↵
11
CAP OL↵
7
DC -39.99 A↵
12
INDUCTANCE
IND 99.99 H↵
12
AC 20A AC 39.99 A↵
11
IND OL↵
7
TEMPERATURE TEMP 0025 ^C↵
13
TEMP -0025 ^C↵
14
Przygotowanie miernika PROTEK 506 do przesyłania danych do komputera polega na połączeniu miernika
z gniazdem szeregowym komputera, a następnie kilkakrotnym naciśnięciu klawisza „ menu key” miernika do
chwili, gdy na wyświetlaczu zacznie migać napis RS-232. Naciśnięcie klawisza „ return key” (↵) przełącza miernik
w tryb komunikacji z komputerem. Komunikacja z miernikiem jest możliwa przy prędkości 1200 bodów,
w przesyłanym słowie znajduje się 7 bitów danych i 2 bity stopu. Słowo nie zawiera bitu parzystości. Liczba słów
przesyłanej informacji zależy od mierzonej wielkości i jej zakresu (tablica 5.1) i może wynosić od 6 do 15.
Pierwsze słowa zawierają informację o mierzonej wielkości, następnie przesyłana jest zmierzona wartość i jej
jednostka. Ostatnie słowo odpowiada powrotowi karetki (kod ASCII 13).
Do zestawienia transmisji danych pomiarowych z miernika PROTEK 506 można wykorzystać program,
opracowanego przez producenta przyrządu pomiarowego. Aplikacja ta realizuje funkcje akwizycji danych
pomiarowych, z wykorzystaniem interfejsu RS-232 i protokołu opisanego powyżej.
5.3. Przebieg ćwiczenia.
Do pierwszego wejścia analogowego karty pomiarowej NI USB 9221, wskazanej przez prowadzącego
ćwiczenie, należy podłączyć napięcie z zasilacza, do drugiego wejścia napięcie z generatora sygnału. Dokonać
pomiaru napięcia stałego i przemiennego, wykorzystując oprogramowanie dostępne na komputerze. Wartości
napięć oraz sposób obsługi programu komputerowego zostaną podane przez prowadzącego zajęcia.
Wyniki zapisać w tablicy 5.2.
Tablica 5.2.
Lp.
Napięcie zmierzone
Napięcie zmierzone
Błąd
Błąd względny
woltomierzem
przyrządem
bezwzględny
cyfrowym
wirtualnym
V
V
V
%
1
2
...
6
...
11
Następnie należy wykonać serię pomiarów z wykorzystaniem miernika cyfrowego PROTEK 506. Po
włączeniu zasilania miernika konieczne jest przełączenie go w tryb współpracy z interfejsem RS-232. W tym celu
należy wykonać kroki opisane w punkcie 5.2. Zapoznać się z obsługą programu „DMM506” i sprawdzić jego
działanie dla różnych wielkości mierzonych. Wyniki pomiarów zapisać w tablicy 5.3.
Tablica 5.3.
Lp.
Napięcie zmierzone
Napięcie zmierzone
Błąd
Błąd względny
miernikiem
przyrządem
bezwzględny
PROTEK 506
wzorcowym
V
V
V
%
1
2
...
6
...
11
5.4. Pytania kontrolne
1. Przedstawić i porównać podstawowe konfiguracje bloku akwizycji sygnałów pomiarowych.
2. Przedstawić zasadę działania i przeznaczenie układu próbkująco-pamiętającego.
3. Na czym polega i kiedy występuje zjawisko nakładania się widm?
4. Kiedy stosowane jest wejście symetryczne karty pomiarowej?
5. Opisać wejście symetryczne i niesymetryczne karty pomiarowej.
6. Co to jest rozdzielczość, zakres i przedział kwantowania przetwornika analogowo-cyfrowego?
7. W jaki sposób dobiera się zakres przetwornika analogowo-cyfrowego?
8. Omówić błędy przetwornika analogowo-cyfrowego.
9. Na czym polega i w jakim celu się stosuje bezpośredni dostęp do pamięci (DMA)?
10. Przedstawić format przesyłanego przez interfejs RS-232 słowa.
11. Jaki jest maksymalny zasięg i prędkość transmisji przy wykorzystaniu interfejsu RS-232?
12. Opisać interfejs RS-423A.
13. Opisać interfejs RS-422A.
14. Opisać interfejs RS-485.
15. Od czego zależy liczba słów przesyłanego wyniku pomiaru z miernika PROTEK 506? Podać przykładowy
format danych.
Instrukcja powstała na podstawie ćwiczenia nr 3 „Układy akwizycji sygnałów pomiarowych” i ćwiczenia nr 5 „Interfejsy szeregowe RS-232
i RS-485” ze skryptu „Systemy pomiarowe – laboratorium” dr hab. inż. D. Świsulskiego.
Wyszukiwarka
Podobne podstrony:
c4 87w 100A
so c4
Fizyka j c4 85drowa
Laboratorium jezyk c4 2013
c4, elektrotechnika, elektroenergetyka, 3 4
poj c4 99cia 1
SPECYFICZNO c5 9a c4 86 ENZYMU
mechanika 2 c5 9aci c4 85ga
Citroen C4 Picasso Datasheet
C4
Kaba c5 82a Niezale c5 bcno c5 9b c4 87+jednostki
C4 5
PRZEJAWY+I+FORMY+AGRESJI++W+SZKOLE++ORAZ+SPOSOBY+ICH+PRZEZWYCI c4 98 c5 bbANIA(1), pedagogika
c4 (2)
naprawa licznik audi 80 b3, b4, audi 100 c3, c4 (146504970) aukcje intern
Anestezjologia C4, Anastezjologia
c4 87w7
analiza sensoryczna c5 9bci c4 85ga
Pe c5 82noziarniste tartaletki z dietetyczn c4 85 nutell c4 85
więcej podobnych podstron