
Współczynnik powrotu w zabezpieczeniu nadmiarowym
Współczynnik powrotu jest konieczną cechą zabezpieczeń nadmiarowych i
niedomiarowych umożliwiających ich prawidłową pracę.
Do zrealizowania współczynnika powrotu można posłużyć się przerzutnikiem RS.
Przerzutnik ten jest podobny do układu samo-podtrzymania stycznika, gdzie wciskając jeden przycisk (START) załączamy stycznik. Po puszczeniu przycisku stycznik nadal pozostaje zamknięty.
Stan ten trwa do czasu wciśnięcia drugiego przycisku (STOP).
Przerzutnik RS posiada dwa wejścia – wejście ustawiające (SET) i wejście zerujące (RESET).
Podając impuls na wejście SET wprowadzamy przerzutnik w stan wysoki.
Przerzutnik będzie w tym stanie pozostawał mimo zaprzestania podawania impulsu na
wejście ustawiające.
Aby przerzutnik powrotem zmienił swój stan na niski należy podać impuls na wejście RESET.
Oczywiście może zdarzyć się i tak, że na oba wejścia zostanie doprowadzony sygnał.
Mamy wówczas odczynienia ze stanem zabronionym, który nie będzie rozważany.
Zastanówmy się nad realizacją przerzutnika RS.
Konieczne są dwa wejścia (SET, RESET) i co najmniej jedno wyjście.
W przerzutnikach oferowanych w postaci układów scalonych najczęściej mamy dwa wyjścia: Q − wyjśyjście " Q "
Q − wyjśyjście " Nie Q "
Wyjście „Nie Q” jest po prostu logiczną negacją wyjścia „Q”.
Nam wystarczy tylko jedno wyjście – wyjście „Q”.
Konieczne będzie też dodatkowe wejście, które dzięki pętli sprzężenia zwrotnego
umożliwi zrobienie „podtrzymania”.
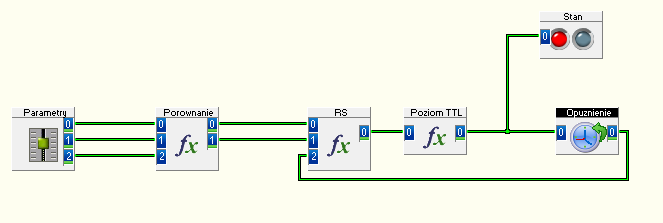
Propozycja układu:
motorniczy
Formułę „RS” należy tak oprogramować aby przy stanach niskich na obu wejściach przekazywała na swe wyjście sygnał otrzymywany ze sprzężenia zwrotnego realizowanego poprzez opóźnienie.
Gdy na wejściu SET pojawi się stan wysoki formuła „RS” powinna podać na swe wyjście stan wysoki.
Będzie on utrzymywany przez podtrzymanie nawet po zaniku sygnały wysokiego na wejściu SET.
Należy też tak zrobić aby podanie sygnału wysokiego nadejście RESET spowodowało, że formuła „RS” poda na swe wyjście logiczne zero.
Wprowadzamy formułę:
(IN(0) >0) OR (IN(2) >0) AND (NOT IN(1) )
Pierwsza część formuły (IN(0) >0) OR (IN(2) >0) umożliwia przepisywanie na wyjście logicznej sumy sygnałów z wejścia SET i ze sprzężenia zwrotnego.
Formuła ta zwraca jedynkę logiczną gdy chociaż jeden z elementów ma stan wysoki.
Czyli wystarczy by albo wejście SET było jedynką albo wejście ze sprzężenia zwrotnego.
Oczywiście gdy oba te sygnały będą jedynkami logicznymi również otrzymamy z formuły logiczną jedynkę.
Oznacza to, że gdy układ był w stanie niskim – miał na wyjściu zero, podanie jedynki na wejście SET spowoduje jej przepisanie na wyjście.
A ponieważ układ potem sam będzie sprawdzał co miał na wyjściu i wykonywał operację OR
z wejściem SET to ostatecznie układ pozostanie w stanie wysokim.
Druga część formuły (NOT IN(1) ) zwraca jedynkę tylko wtedy gdy na wejściu RESET jest stan niski. Ta jedynka mnożona logicznie z pierwszą częścią formuły umożliwia zerowanie przerzutnika.
Gdy wejście RESET jest w stanie niskim wynikiem operacji (NOT IN(1) ) jest jedynka logiczna. Wykonując operację AND tej jedynki z pierwszą częścią formuły nie zmieniamy opisanego wcześniej działania układu – jest wstanie się pobudzić po otrzymaniu jedynki na wejście SET i pozostawać w stanie wysokim.
Gdy na wejście RESET zostanie podana jedynka logiczna to wynikiem operacji (NOT IN(1) ) jest zero logiczne.
To zero logiczne mnożone logicznie z pierwszą częścią formuły sprawi, że układ przejdzie w stan niski.
motorniczy


Zadaniem bloczku „Poziom TTL” jest zamiana sygnału zero jedynkowego na sygnał
odpowiadający poziomom TTL (w przybliżeniu 0÷5V). Realizuje on mnożenie przez pięć.
Sprawdźmy działanie układu.
motorniczy
Teraz możemy przystąpić do właściwego zadania – realizacji współczynnika powrotu.
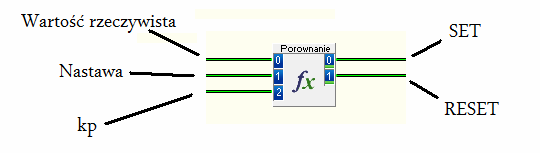
Należy zbudować formułę, do której doprowadzone będą trzy sygnały:
- wartość rzeczywista wielkości mierzonej
- nastawa
- zadany współczynnik powrotu
Formuła będzie miała dwa wyjścia. Jedno będzie doprowadzone do wejścia SET przerzutnika RS, drugie do wejścia RESET tego przerzutnika.
Na pierwszym wyjściu formuły ma się pojawić stan wysoki gdy wartość rzeczywista będzie większa lub równa nastawie.
IN(0) >= IN(1)
Na drugim wyjściu ma się pojawić jedynka logiczna gdy wartość rzeczywista będzie mniejsza lub równa nastawie przemnożonej przez współczynnik powrotu
IN(0) <= (IN(1) *IN(2) )
Pozostaje zbudować próbny układ. W układzie tym wszystkie trzy wielkości będą zadawane suwakami.
Należy teraz już tylko sprawdzić poprawność układu.
Wielkość rzeczywistą zwiększamy aż do nastawy. Gdy zrówna się z nastawą zabezpieczenie powinno się pobudzić.
Gdy będziemy teraz zmniejszać wartość rzeczywistą – odwzbudzenie nastąpi gdy wartość rzeczywista osiągnie k nastawy.
p
motorniczy
Wyszukiwarka
Podobne podstrony:
Bielik-Robson Powrot mesjanskiej obietnicy, Filozofia współczesna, Adorno
Przejawy i rozmiary brutalizacji we współczesnym świecie2
E learning Współczesne metody nauczania
Współczesne systemy polityczne X
współczesne nurty pedagogiczne
Problemy współczesnego świat
RI 12 2010 wspolczesne koncepcje
współczesne postrzseganie BN
Uklad wspolczulny sympatyczny
Współczesne zarządzanie strategiczne
06 Napięcie powrotneid 6337 ppt
ukl wspolczulny zapis 2003
WSPÓŁCZESNE ID ED
Najnowsze osiągnięcia współczesnej kardiologii
więcej podobnych podstron