PYTANIA NA EGZAMIN Z GEODEZJI SATELITARNEJ
Krótko omówić altymetrię satelitarną.
Altimetria satelitarna polega na wyznaczenia odległości impulsowego nadajnika-odbiornika radarowego umieszczonego na orbicie (o wysokości ok. 700 do 1500 km) od rzeczywistej, chwilowej powierzchni morza. Do satelitarnych pomiarów altimetrycznych stosuje się radary pracujące w zakresie częstotliwości 14 GHz. Precyzję radarów altimetrycznych można obecnie szacować w przedziale +/- (0,1-0,03) m. Wynik pomiaru jest wartością uśrednioną do kręgu powierzchni morza o średnicy kilku do kilkunastu kilometrów.
Podstawowe równanie altimerii:
N = | r - R | - H - Δh
gdzie: N - wysokość geoidy na elipsoidą (undulacje dochodzą do 100 m), r - promień wodzący satelity (wektor), R - promień wodzący punktu na elipsoidzie (wektor), H - mierzona wysokość, Δh - różnica wysokości powierzchni wody i geoidy (osiąga średnio wartości ok. 1 m. - można zaniedbać przy dokładności 1 m).
Pomiar altimertyczny pozwala na wyznaczenie wysokości satelity nad powierzchnią morza z dokładnością 1 cm. Najpowszechniej znane są wyznaczenia geoidy z misji satelitów: Skylab dokładność mierzonych wysokości szacuje na ok. 3m., GEOS-3 ok. +/-0,5 m., SEASAT ok. +/-0,1 m, GEOSAT. Pomiar altimetryczny pozwala wyznaczyć kształt powierzchni wód oceanicznych. Kształt powierzchni wód odbiega od kształtu geoidy ze wzg. na występowanie: prądów morskich, falowania wód oceanicznych, wiatrów, różnic ciśnień atmosferycznych, różnic zasolenia wód itd. Altimetria satelitarna ma znaczący udział w tworzeniu coraz dokładniejszych modeli potencjału grawitacyjnego Ziemi.
Wymienić i opisać segmenty składowe systemu GPS.
segment kosmiczny
Segment ten składa się z satelitów operacyjnych poruszających się po półsynchronicznych orbitach wokół kuli ziemskiej. Satelity nadaja z pokładu dwie częstotliwości radiowe z kodowanymi informacjami o czasie oraz z depesza satelitarna - zbiorem informacji niezbędnych dla użytkownika
segment kontrolny
Segment ten składa się z głównej stacji kontrolnej i kilku stacji monitorujących rozmieszczonych w róznych częsciach kuli ziemskiej.
Stacja główna MCS sledzi, monitoruje i zarządza cala konstelacja satelitów. Do jej zadan należy uaktualnianie danych nawigacyjnych.
System stacji kontrolnych sklada się z pieciu stacji monitorujących oraz trzech stacji kontrolnych, wyposażonych w anteny telemetryczne utrzymujące łączność z satelitami
Stacje monitorujące wyposażone sa w precyzyjne wzorce cezowe oraz odbiorniki majace możliwość generowania kodu P, wykonuja nieprzerwanie obserwacje wszystkich satelitów systemu, rejestruja kolejne pomiary co 1,5s i lacza pomiary w zbiory 15 minutowe.
Stacje kontrolne zapewniaja lączność miedzy satelitami z główna stacja kontrolną. Odpowiadaja za przesylanie informacji o efemerydach satelitów i danych dotyczących korekty zegarów satelitów.
Stacja główna zawiera wszystkie dane z satelitów, oblicza orbity satelitów i parametry ich zegarów, nastepnie przesyła je do trzech stacji kontrolnych.
segment użytkowników
segment ten składa się z wielu różnych odbiorników radionawigacyjnych, specjalnie przystosowanych do odbioru, dekodowania i przetwarzania sygnałów satelitarnych oraz obliczania parametrów nawigacyjnych - pozycji, prędkości, kursu itp.
Segment użytkownika można podzielic na dwie grupy: Precise Positioning Servise oraz Standard Positioning Service.
Opisz cechy charakterystyczne konstelacji satelitów GPS.
Satelity GPS poruszają się po orbitach prawie kołowych oddalonych od Ziemi o ponad 20 000 km, okres jednego obiegu takiego satelity wokół Ziemi wynosi około 12 godzin. Takie rozmieszczenie satelitów w przestrzeni zapewnia możliwość jednoczesnego śledzenia (widzenia) przynajmniej czterech satelitów GPS z dowolnego punktu na powierzchni Ziemi.
Na dzien dzisiejszy konstelacje stanowia: 1 satelita z bloku II, 15 satelitów z bloku IIa, 12 satelitów z bloku IIR oraz 3 satelity z bloku IIR-M. na 8 satelitach wykorzystywany jest wzorzec cezowy na reszcie wzorzec rubidowy. Podstawowe parametry orbitalne konstelacji to
- mimośród bliski zeru ( odbita prawie kolowa )
- okres obiegu ok. 12h - orbita półsynchroniczna
- równomierne cofanie się węzłów wstępujących 6 plaszczyzn orbitalnych
- znikomy wpływ perturbacji od atmosfery
Prawa Keplera w opisie ruchu sztucznych satelitów Ziemi.
I prawo Keplera mowi o tym, ze ruch satelity względem ciala centralnego ( Ziemi ) odbywa się po orbicie będącej krzywa stożkową , przy czym cialo centralne znajduje się w jednym z ognisk orbity.
Równanie orbity satelity :
r = p/ (1+e cosδ)
r - promien wodzacy satelity, δ - anomalia prawdziwa, p - parametr ogniskowej orbity
e = ( (a2 - b2)/a2)1/2 p = a (1 - e2)
II prawo Keplera mówi o tym, ze promien wodzący satelity zakresla podczas obiegu Ziemi wycinki powierzchni o równych polach, co oznacza ze istnieje stała prędkość polowa satelity. Powierzchnia sektora zmienia się proporcjonalnie do czasu.
III prawo Kelera mowi o tym, ze cialo centrale (Ziemia) o masie MZ i satelita S o masie m krążą wokół umownego wspólnego środka mas ŚMzm z prędkością kątowa ωk
MZ ωk2 r1 = m ωk2 r2 = GMZm/r2
Kwadraty okresów obiegu P dwóch planet maja się do siebie w takim stosunku. jak sześciany ich średnich promieni wodzących (wielkich półosi elips, a).
Podstawowe cechy charakteryzujące satelity systemu GPS i GLONASS.
|
GPS |
GLONASS |
Rozmieszczenie: |
|
|
Liczba satelitów (aktywne) |
24 (28) |
24 (18) |
Średnia masa satelity (kg) |
815 |
700 |
Liczba planów orbitalnych |
6 |
3 |
Rozmieszczenie satelitów na orbicie (deg) |
60 |
120 |
Inklinacja* (deg) |
55 |
65.8 |
Wysokość orbit (km) |
20200 |
19100 |
Czas okrążenia Ziemi (hr:min) |
11:58 |
11:16 |
Geodezyjny układ odniesienia |
WGS 84 |
PZ 90 (SGS 85) |
Charakterystyka sygnału: |
|
|
Częstotliwość nośna (MHz) SPS |
L1: 1575.42 |
L1: 1602+0.5625n |
Częstotliwość nośna (MHz) PPS |
L2: 1227.60 |
L2: 1246+0.4375n, |
Częstotliwość sygnałów (MHz) |
C/A code: 1.023 |
C/A: 0.511 |
Transmisja danych (bity/s) |
50 |
50 |
Metoda kodowania |
CDMA |
FDMA |
Dokładność systemu (standard) |
Pozioma (m): 100 |
Pozioma (m): 57 - 70 |
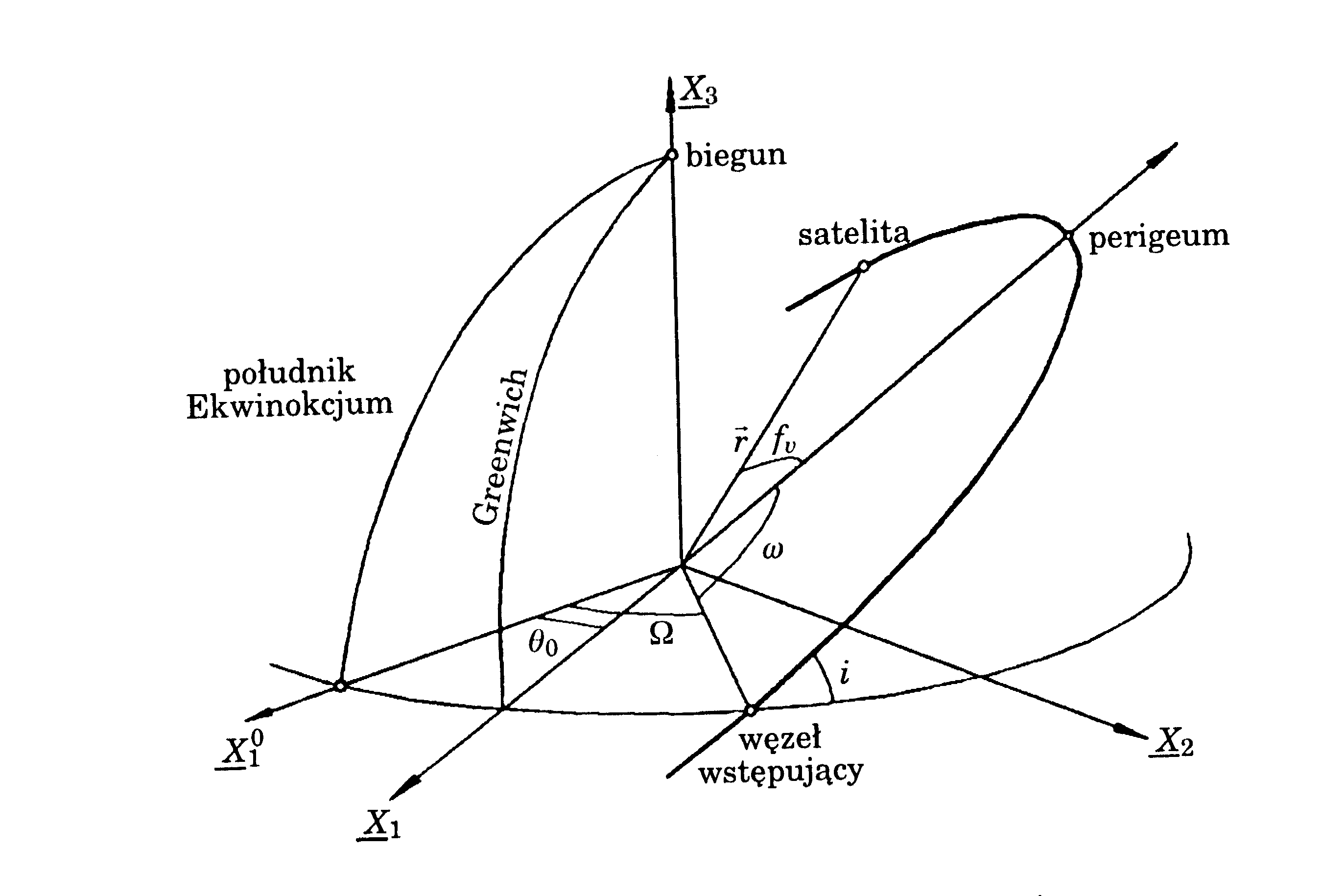
Co to są keplerowskie elementy orbity?
Parametr |
Znaczenie |
|
długość ekliptyczna węzła wstępującego |
|
kąt nachylenia płaszczyzny orbity do równika |
|
kąt między perycentrum i węzłem wstępującym, argument perygeum |
|
półoś wielka orbity |
|
mimośród orbity |
|
moment przejścia przez perycentrum |
Wykaż różnicę między orbitą keplerowską a oskulacyjną.
Można powiedzieć, że satelita porusza się po orbicie keplerowskiej o stale zmieniających się parametrach. Rzeczywista orbita satelity jest zawsze ściśle styczna do coraz to innej, zmieniającej się orbity keplerowskiej, a punktem styczności jest punkt, w którym znajduje się satelita. Taką ciągle zmieniającą się orbitę nazywamy orbitą oskulacyjną (chwilową), a jej elementy obliczone przez scałkowanie równań elementami oskulacyjnymi.
Wymień źródła perturbacji satelitarnych , oszacuj ich wielkość.
Rodzaj perturbacji |
Maksymalne przyspieszenie perturmbacyjne (m/s2) |
Dominujący okres perturbacji długookresowej (h) |
Wielkość perturbacji |
||
|
|
|
Po 1h |
po 3h |
po 2 dniach |
Pole grawitacyjne Ziemii: -Wpływ splaszczenia (J) wpływ innych harmonik Wpływ mas Słońca i Księżyca Ciśnienie światła słoneczego |
5 10-5
3 10-7
5 10-6
1 10-7 |
+6
+12
+3 |
=300
0.6-5
=50
0.6 |
=2000
5-80
5-150
5-10 |
=14000
100-1500
1000-3000
100-800 |
Perturbacje wiekowe trzech kątowych elementów orbity satelitów GPS wynoszą około:
Ogólna charakterystyka systemu GLONASS.
Orbita satelity Glona jest orbita kołową e = 0.01 o średniej wysokości 19 100 km i kacie inklinacji 64.8. wysokość ta została tak dobrana aby możliwe bylo wykorzystywanie sygnałow satelity n wysokości 2 000 km nad powierzchnia Ziemi. Czas jednego obiegu Ziemi przez satelite wynosi w przybliżeniu 11h 15m 44s. na każdej z 3 orbit znajduje Sie 8 rownomiernie rozmiesczonych 8 satelitów. Argument szerokości dwoch sąsiednich róznic sie o 45 st. Różnica argumentu szerokości na drugiej i trzeciej obice wzgledem satelitów na orbicie pierwszej wynosi + 15 st i - 15 st. Róznica długości geograficznej wezla wstępującego dla każdej orbity wynosi 120 st.kazdy satelita na orbicie którego długość wezla wstępującego wynosi B ma swojego odpowiednika na orbicie o długości wezla wstępującego B+120 oraz sam jest odpowiednikiem dla satelity na orbicie o długości geograficznej wezla wstępującego B-120 st.
Charakterystyka częstotliwości sygnałów GPS.
Satelity systemu GPS emituja nieprzerwanie sygnały na dwoch częstotliwościach nosnych z pogranicza fal mikrofalowych L i S:
L1 = 154 * 10.23 MHz
L2 = 120 * 10.23 MHz
Obie częstotliwości SA zgodne w fazie z sygnałem oscylatora. SA to fale koherentne, dzieki czemu możliwe jest określenie grupowego opóźnienia fali nośnej wywołanego wpływem jonosfery. Wszystkie satelity dodatkowo emituja sygnal na częstotliwości 135 * 10.23 MHz dla celów innych niz określanie pozycji.
W jaki sposób jest modulowana fala nośna w systemie GPS?
Fale nosne GPS podlegają modulacji:
- amplitudy
- częstotliwości
- fazy
Częstotliwości nosne podlegaja modulacji kodami C/A oraz P/Y. kod C/A jest pseudoprzypadkowym szumem indywidualnym dla każdego satelity, o bardzo krotkim czasie powtarzania - 1 milisekunda Kod P/Y jest pseudoprzypadkowym szumem, indywidualnym dla każdego satelity. Jest wytwarzany za pomoca modulacji fali i ma bardzo dlugi okres trwania - 266,4 dnia. Każdy z satelitow transmituje tygodniowy fragment całego okresu kodu P/Y. ostatecznie satelita nadaje fale L1 modulowana kodem P i L1 obrcona w fazie o 90st modulowana kodem C/A oraz fala L2 modulowana kodem P możliwością przelaczenia na modulacje kodem C/A.
Co zawiera depesza satelitarna GPS.
Depesza satelitarna zawiera:
- efemeryde - szczegółowe elementy orbitalne satelity, niezbędne do obliczenia na dany moment jego współrzędnych, do określenia momentu wyslania sygnalu oraz ustalenia czasu systemu GPS
- almanach - elementy dotyczące aktualnego stanu systemu, w tym miedzy innymi przybliżone elementy orbitalne ( 6 elementów orbity eliptycznej )wszystkich znajdujących się a orbitach satelitów systemu. Ich znajomość umozliwia określenie konfiguracji całego systemu oraz przyspiesza proces akwizycji, tym samym możliwe jest obliczenie z mniejsza dokładnością współrzędnych wszystkich satelitów.
Jakie dane są przesyłane z satelity GPS do odbiornika?
Odbiorniki systemu GPS ciągle odbierają informację o pozycji satelitów w formie zmodulowanego sygnału bitowego o prędkości 50 bitów na sekundę. Informacja ta zawiera:
- system czasu;
- poprawkę zegara;
- informację o kodach P i C/A nałożonych na częstotliwości L1 i L2.
Jest ona standardowo podzielona na 5 podtablic. Pierwsza podtablica niesie w sobie podstawowe wskaźniki ( kody, częstotliwości, rodzaj danych, numer tygodnia, itp.) i poprawki zegarów satelitów. Druga i trzecia podtablica zawiera efemerydy.
Czwarta składa się z almanachów dla satelitów o numerach 25-32, informacji o modelu jonosferycznym, danych UTC, konfiguracji satelitów i informacji o ich stanie. Posiada również strony zarezerwowane oraz miejsca wolne. Piąta podtablica składa się z almanachów oraz informacji o stanie satelitów o numerach 1-24.
Co to jest precyzyjny serwis pozycyjny GPS?
PPS dostarcza informacji o pozycji z dokładnością nie gorszą niż 16 metrów (50%,3D) i informacji o czasie z dokładnością nie gorszą niż 100 nanosekund (1 sigma) w stosunku do czasu UTC(USNO) (Universal Coordinated Time US Naval Observatory. PPS dostępny jest jedynie dla autoryzowanych użytkowników i przeznaczony głównie dla celów wojskowych. Do autoryzowanych użytkowników należą: Siły Zbrojne USA i NATO. O autoryzacji użytkownika decyduje Departament Obrony USA.
Dostęp do PPS kontrolowany jest dwiema metodami:
Ograniczony Dostęp (SA - Selective Availability) pozwala na zmniejszenie dokładności pozycji i czasu dostępnych dla nieautoryzowanych użytkowników. SA działa poprzez wprowadzanie kontrolowanych błędów do sygnałów satelity i depeszy satelitarnej. Departament Obrony zadeklarował, iż w czasie pokoju SA zmniejszy dokładność pozycji dla użytkowników SPS do 100 metrów (95%, 2D).
Anti-spoofing (A-S) jest włączany bez ostrzeżenia by uniemożliwić imitowanie sygnałów PPS przez nieprzyjaciela. Technika ta zmienia kod P, szyfrując go, w kod oznaczony jako kod Y. Nie ma to wpływu na odbiór kodu C/A. Klucz do szyfru dostępny jest wyłącznie autoryzowanym użytkownikom umożliwiając im usunięcie wpływu SA i A-S. W ten sposób uzyskują oni maksymalną dostępną dokładność.
Odbiorniki PPS mogą używać kodu P(Y), kodu C/A lub obydwu. Największa dokładność uzyskiwana jest przy użyciu kodu P(Y) sygnałów o częstotliwościach L1 i L2. Różnica w czasie propagacji sygnałów o różnych częstotliwościach używana jest do wyznaczenia poprawki jonosferycznej. Zazwyczaj odbiorniki PPS używają kodu C/A w celu inicjacji śledzenia sygnałów satelitów i wyznaczenia przybliżonej fazy kodu P(Y).
Co to jest standardowy serwis pozycyjny GPS?
SPS - Standardowy serwis pozycyjny dostarcza informacji o pozycji z dokładnością nie gorszą niż 100 metrów (95%,2D) w rozwiązaniach dwuwymiarowych i 156 metrów (95%,3D) w rozwiązaniach trójwymiarowych. Dokładność informacji o czasie określona jest na nie gorszą niz. 337 nanosekund (95%) w stosunku do skali UTC(USNO). SPS przeznaczony jest głównie dla użytkowników cywilnych. Wymieniona dokładność zawiera wpływ SA, który jest głównym źródłem błędów SPS. Rozkład błędów wyznaczenia pozycji przypomina rozkład normalny z długookresową średnią równą zeru.
A-S uniemożliwia użytkownikom SPS dostęp do kodu Y. Tak więc użytkownicy SPS nie mogą opierać się na bezpośrednim pomiarze kodu P, by zmierzyć dokładnie różnice w propagacji częstotliwości L1 i L2, a zatem określić wielkość poprawki jonosferycznej - kod C/A nadawany jest tylko na częstotliwości L1. Typowy odbiornik SPS do wyznaczenia poprawek jonosferycznych używa modelu jonosfery transmitowanego w depeszy satelitarnej, jest to procedura znacznie mniej dokładna niż pomiar na dwóch częstotliwościach. Dokładność pozycji przy użyciu SPS podana na początku tego punktu uwzględnia też błąd modelowania jonosfery. Odbiorniki geodezyjne używają rozmaitych wyrafinowanych metod do określenia różnicy czasów propagacji, bez jawnej znajomości transformacji kodu P do Y.
Sztucznie wprowadzone i niektóre naturalne ograniczenia dokładności mogą być w dużym stopniu wyeliminowane przy użyciu technik różnicowych. Techniki te polegają na wykorzystaniu poprawek wyznaczanych przez precyzyjnie zlokalizowane odbiorniki, zwane stacjami referencyjnymi. Poprawki różnicowe mogą być wprowadzane po pomiarze, lub w czasie rzeczywistym, w tym ostatnim wypadku do ich transmisji wykorzystuje się łącza radiowe. W najbliższym czasie przewiduje się upowszechnienie systemów dystrybucji poprawek różnicowych z pokładu satelitów komunikacyjnych.
Przedstaw ogólną zasadę działania odbiornika GPS.
Zasada dzialania odbiornika nawigacyjnego polega na odbiorze sygnalu, identyfikacji satelity nadającego sygnal, oraz na przeprowadzeniu synchronizacji kodu wytwarzanego przez lokalny oscylator z sygnalem odbieranym z satelity, tak aby możliwy był pomiar czasu kreslający pseudoodległość odbiornika od satelity oraz rozkodowanie wszystkich informacji przesylanych przez satelite.
Podaj źródła błędów ograniczających dokładność pomiarów GPS.
- sztucznie wprowadzone zniekształcenia sygnalu i informacji satelitarnej
- zmienne opóźnienie jonosferyczne - najpowazniejsze, zalezne od gęstości swobodnych elektronow na drodze sygnalu wynosi 10- 50 m
- zmienne opóźnienie troposferyczne - zmienne w przedziale 2- 3 m
- odbior sygnalów obitych - sygnaly odbite od powierzchni ziemi oraz konstrukcji otaczających antene, wpływa na pomiar pseudoodległości , dochodzi do 10 m bład fazy nosnej może wynosic kilka cm
Podaj algorytm wyznaczania pozycji z obserwacji pseudoodległości.
odbior depeszy nawigacyjnej przez odbiornik
wyznaczenie satelit będących w zasiegu odbiornika
pomiar pseudoodległości do satelitów
wyznacznie współrzędnych satelitów do których mierzona była pseudoodleglosc
rozwiązanie układu równań z min 4 niewiadomymi ( wciecie wstecz)
Co to są nieoznaczoności fazy i w jaki sposób można je eliminować?
Nieoznaczoność fazy jest liczbą całkowitą interpretowaną jako różnica początkowej fazy i odległości. Zachowuje ona stałą wartość podczas całego procesu pomiarowego do momentu, w którym nie nastąpi przerwa w śledzeniu sygnału satelitarnego. Wystąpienie takiego zaburzenie powoduje powstanie nieciągłości fazy (ang. cycle slip), czyli zmianę rejestrowanej fazy o całkowitą liczbę cykli, podczas, gdy ułamkowa część fazy pozostaje niezmienna.
Istnieją dwie metody eliminacji przesunięcia cykli. Po pierwsze zakłócenie to powinno być usuwane w czasie obróbki danych, po drugie zaś można precyzować dla każdej pseudoodległości nową nieoznaczoność fazy. Znacznym ułatwieniem w wykrywaniu i eliminacji utraty cykli jest ułożenie podwójnych lub potrójnych różnic, gdyż generalna zasada jest taka, że przesunięcie cykli jest zawarte we wszystkich pojedynczych i podwójnych różnicach zaczynających się w epoce t, ale już tylko w jednej z potrójnych różnic.
Omów różnicowanie obserwacji GPS.
W stacji referencyjnej dla wszystkich widocznych satelitów porównywana jest zmierzona w jej odbiorniku pseudoodległość ρz z odległością ρo obliczoną na podstawie rozkodowanych efemeryd i parametrów samej stacji. Na tej podstawie wyznaczana jest poprawka Δρ, oznaczona symbolem PRC ( Pseudo-Range Correction ), równa różnicy między odległością ρo, a pseudoodległością ρz:
Δρ = ρo - ρz
Po uwzględnieniu dodatkowego błędu w pomiarze pseudoodległości z powodu błędu efemeryd Δεs poprawkę można przedstawić w postaci:
Δρ = ρo - ρz + Δεs
Z uwagi jednak na to, że obliczona przez stację w chwili t0 poprawka PRC zostaje uwzględniona w odbiorniku użytkownika dopiero po upływie pewnego czasu - w chwili t, w stacji referencyjnej dla każdego obserwowanego satelity na chwile t0 obliczana jest również, oznaczana symbolem RRC ( Rate of Pseudo-Range Correction ), poprawka dotycząca prędkości zmian poprawki PRC. Tym samym wartość poprawki PRC w ruchomym odbiorniku użytkownika w chwili t określa zależność:
PRC(t) = PRC(t0) + RRC(t0)( t - t0 )
Z uwagi jednak na to, że dla każdego satelity poprawki PRC i RRC obliczono na podstawie znajomości efemeryd i odchyłki przesunięcia w czasie powstałego w wyniku szumów własnych odbiornika, odbić wielokrotnych itp, poprawki te związane są z parametrem IOD
( Issue of Data ) określającym moment, w którym ową efemerydę i ową odchyłkę wyznaczono. Dlatego też dla każdego satelity parametr IOD dotyczący odebranej przez użytkownika poprawki powinien być ten sam co parametr IOD dotyczący zmierzonej w tym odbiorniku pseudoodległości. W stacji referencyjnej obliczana jest więc jeszcze jedna poprawka, zwana poprawką delta-różnicową, przeznaczona dla tych odbiorników, które nie dekodują nowych efemeryd niezwłocznie po ich otrzymaniu. Z uwagi na to, że stacja referencyjna dekoduje efemerydy natychmiast, może zdarzyć się sytuacja, w której IOD danych przez nią użytych i IOD danych użytych przez odbiornik użytkownika będą się różnić. Tym samym określona w ten sposób pozycja DGPS obarczona zostanie dodatkowym błędem.
W idealnym przypadku pomiary (błędy pomiaru) użytkownika są w pełni skorelowane z pomiarami (błędami pomiarów) stacji referencyjnej, w praktyce jednak korelacja zaczyna zanikać. Występują dwa rodzaje dekorelacji, tzw. dekorelacja błędów pomiarowych - czasowa i przestrzenna. Pierwsza z nich polega na pogarszaniu dokładności określanej przez użytkownika wraz z upływem czasu, druga z oddalaniem się użytkownika od stacji referencyjnej. Dzieje się tak gdyż efemerydy satelity oraz parametry charakteryzujące troposferę, a w szczególności jonosferę, zależą nie tylko od miejsca ale i od czasu.
Co to jest współczynnik PDOP, od czego zależy i co charakteryzuje?
Niedokładność samego wyznaczania pozycji względem położenia satelitów nazywa się rozmyciem dokładności (Dilution of Precision - DOP). W przypadku PDOP rozmycie to dotyczy pozycji (Position DOP - PDOP) - stosunek pomiędzy błędem w obliczeniu pozycji użytkownika a błędem w obliczeniu pozycji satelity. Informuje ona o tym, kiedy rozmieszczenie satelitów pozwoli uzyskać najdokładniejszy wynik. Pożądana jest wartość PDOP mniejsza od 3.
Scharakteryzuj zaburzenia jonosferyczne.
Opóźnienie to powstaje w wyniku przejscia sygnalu przez warstwe jonosfery dla której współczynnik zalamania jest < 1. w jonosferze opoznienie sygnalu zalezy od dnia - dzien 150 ns w nocy 30 ns oraz od wysokości topocentrycznej - nisko nad horyzontem ok. 3 razy wieksze niż w dla satelitow znajdujących się w zenicie ( 50 ns i 10 ns )największy bład wystepuje dla użytkowników dla których odległość od satelity jest najwieksza. Opóźnienie to może być wyeliminowane poprzez stosowanie odbiornikow dwuczęstotliwościowych.
Podaj metody eliminowania wpływu refrakcji jonosferycznej z obserwacji GPS.
tworzenie modeli jonosfery
wykorzystywanie odbiornikow dwuczęstotliwościowych, tworzenie równań roznicowych
Jaki jest wpływ troposfery na obserwacje GPS?
Opóźnienie powstaje przy przejsciu sygnału przez troposfere, dla której współczynnik zalamania wynisi >1. największe wydłuzenie drogi sygnalu wystepuje gdy satelita jest nisko nad horyzontem a użytkownik na biegunie, najmniejsze gdy użytkownik znajduje wie w wysokisz szerokościach geograficznych a satelita w zenicie. Wydłużenie dla h = 5st wynosi 25 m a dla zenitu 2.4 m, wynika z tego ze bład pseudoodległości dla użytkowników PPS i SPS jest taki sam i wynosi ok. 1,5 m
Wymień metody pomiarowe GPS i krótko je scharakteryzuj.
Metoda statyczna
Najszerzej stosowaną i najbardziej znaną jest technika obserwacji statycznych. Klasyfikując ją wśród innych można powiedzieć, iż jest to metoda typu postprocessing, wykorzystująca pomiary fazowe.
Zapewnia ona najwyższe, możliwe do osiągnięcia w pomiarach GPS, dokładności pozycjonowania. Błędy średnie położeń punktów wyznaczonych tą techniką są rzędu 2-5 mm, wymaga ona jednak dość długich jednoczesnych obserwacji na obu punktach.
Współrzędne przybliżone punktów obliczane są na podstawie zmierzonych pseudoodległości do przynajmniej 4 satelitów. Na podstawie ułożonych równań, po jednym dla każdego satelity dla danej epoki obserwacyjnej, obliczane są współrzędne przybliżone obu pomierzonych punktów oraz poprawki zegarów obu odbiorników, tak jak w metodzie autonomicznej. W kolejnym kroku wykonywane są już obliczenia różnicowe (jeden z punktów wektora zostaje przyjęty za stały i uzyskuje współrzędne obliczone poprzednio), z wykorzystaniem pomiarów fazowych. Następnie program oblicza tzw. podwójne różnice z pomiarów fazowych.
Tradycyjnie, metoda statyczna stosowana jest do aplikacji precyzyjnych, jak wyznaczanie współrzędnych punktów geodezyjnych wysokich klas, do badania stałości punktów, przemieszczeń i deformacji powierzchni terenu lub obiektów inżynierskich.
Należy tu wspomnieć także o nowocześniejszej metodzie pozycjonowania, zwanej metodą „szybką statyczną” (ang. „Rapid Static”). Metoda ta może być stosowana, jeśli mamy do dyspozycji odbiorniki z kodem precyzyjnym „P”. Dodatkowe ograniczenia to ilość satelitów (minimum 5, zalecane więcej) oraz długość wyznaczanego wektora (nie powinna przekraczać 10 km). Jeśli wszystkie te warunki są spełnione, można uzyskać najwyższe, milimetrowe dokładności na podstawie 10-15 -minutowych sesji obserwacyjnych.
Metoda RTK
Antena GPS stacji bazowej umieszczona jest nad punktem o znanych współrzędnych w układzie WGS-84. Odbiornik tej stacji mierzy i rejestruje fazy sygnałów nośnych oraz pseudo-odległości do śledzonych i widocznych satelitów. Natychmiast po pomiarze, odbiornik ten transmituje drogą radiową pomierzone dane do zestawu ruchomego.
Radiomodem zestawu ruchomego odbiera przesłane ze stacji bazowej pomiary. W tym samym czasie co stacja bazowa, odbiornik ruchomy mierzy i rejestruje: fazy sygnałów nośnych oraz pseudo-odległości do śledzonych i widocznych przez zestaw ruchomy satelitów. Odbiornik zestawu ruchomego wyznacza swoją pozycję, wykorzystując zsynchronizowane w czasie pomiary ze stacji bazowej i pomiary własne. Zastosowanie zaawansowanych procedur obliczeniowych i dobre jakościowo pomiary satelitarne pozwalają na uzyskanie pozycji własnej anteny odbiornika ruchomego w stosunku do pozycji stacji bazowej, z dokładnością kilku centymetrów.
Jakie elementy wchodzą w skład procesu wyznaczania współrzędnych metodą satelitarną GPS?
Co zawiera analiza warunków pomiarowych ( z wykorzystaniem techniki GPS)?
- możliwości techniczne odbiornikow GPS
- analiza warunków obserwacji w miejscu pomiaru
- liczbe możliwych do uzyskania pomiarów
- geometryczny rozklad obserwowanych satelitow względem miejsca obserwacji
Podaj metody wyznaczania wysokości normalnych z wykorzystaniem techniki GPS.
Wyznaczenie wysokości elipsoidalnych i przeliczenie na wysokości normalne uwzględniając numeryczny model geoidy oraz odstep elipsoidy WGS 84 od przyjętego modelu geoidy
Podaj związek miedzy ziemskim układem odniesienia a quasi-inercjalnym układem odniesienia.
Scharakteryzuj ITRF i ITRS.
Podstawę systemu EUREF stanowi geocentryczny układ globalny definiowany przez ITRS (International Terrestrial Reference System). Ze względu na wzajemne ruchy jednostek tektonicznych, pociągające za sobą zmiany współrzędnych stacji, zaistniała konieczność odnoszenia układu do określonej epoki. Taka reprezentacja układu ITRS, w postaci zbioru współrzędnych na epokę np. 1989.0, nosi nazwę układu odniesienia ITRF-89 (International Terrestrial Reference Frame). Na terenie Europy znajduje się kilkadziesiąt stacji GPS, SLR i VLBI, które definiują system europejski (ETRS - European Terrestrial Reference System), zaś ich współrzędne odtwarzają układ ITRF w zakresie ograniczonym do kontynentu europejskiego w postaci zbioru współrzędnych stacji tworząc w ten sposób tzw. ETRF (Europen Terrestrial Reference Frame). Nie uwzględniając lokalnych zmian tektonicznych, a biorąc pod uwagę jedynie ruchy płyt kontynentalnych, można uważać, że współrzędne ETRF-89, sztywno związane z naszym kontynentem będą się zmieniały względem ITRF w granicach 1-3 cm rocznie.
Wyjaśnienia wymaga problem niewielkich rozbieżności pomiędzy układami ITRF i ETRF. Współrzędne w układzie ETRF będą mogły być wyznaczane z dokładnością, która jest ograniczona przez ruch płyt kontynentalnych. Aby zmniejszyć ten nieuchronny efekt, układ ETRF jest czasowo synchronizowany z układem ITRF. Odbywa się to przez ponowny pomiar na stacjach EUREF w celu ich dowiązania do ITRF. Wynika z tego nowy zbiór obserwacji i wyników w postaci katalogu współrzędnych stacji EUREF, aktualny dla danej epoki i realizacji układu ITRF. W ten sposób, w wyniku okresowych aktualizacji układu ETRF, rozbieżność pomiędzy tym układem, a ściślej jego reprezentacją przez współrzędne stacji EUREF i układem globalnym ITRF, w którym są wyrażone współrzędne satelitów GPS, jest okresowo redukowana. Oczywiście, tą niewielka rozbieżność w wielu praktycznych zastosowaniach można bez większych strat na dokładności pomijać
Z czego wywodzi się system ETRS?
32. Scharakteryzuj sieci WSSG, EUREF-POL, POL-REF.
W połowie roku 1992 EUREF został rozszerzony na terytorium Polski. Do włączenia wytypowano 11 punktów równomiernie rozmieszczonych na terenie Polski: Borowiec, Grybów, Zubowice, Rogaczew, Studnice, Józefosław, Borowa Góra, Czarnkowo, Masze, Lamkówko i Rozewie. Stabilizację wykonano w postaci postumentu betonowego o wysokości ok. 100 cm nad poziomem gruntu z centrowaniem wymuszonym. Punkty EUREF-POL wyznaczone są w klasie B dokładności, co oznacza dokładność 1 cm, oszacowaną błędem średnim każdej współrzędnej X,Y i Z na epokę 1989.0, tzn. bez gwarancji niezmienności w określonym przedziale czasu (w klasie A, przy tej samej dokładności, stabilność jest określana przedziałem dziesięcioletnim).
W 1993 roku rozpoczęto prace związane z utworzeniem nowej osnowy podstawowej kraju - POLREF. Wszystkie punkty osnowy I klasy na których możliwe było wykonanie pomiarów GPS, stały się jednocześnie punktami POLREF. Nastąpiła jednak wymiana znaków naziemnych. Przy stabilizacji nowej sieci brano pod uwagę fakt, iż na punktach tych będą wykonane pomiary niwelacyjne oraz grawimetryczne. Nowa osnowa geodezyjna I rzędu POLREF wyznaczona techniką GPS jest:
precyzyjna
trójwymiarowa
jednorodna
Powierzchniowa
Ogółem sieć POLREF składa się z 348 zespołów (punkt główny i kierunkowy), które nawiązane są do 11 punktów sieci EUREF-POL
Nawiązanie do istniejących osnów SAG i SW:
209 punktów POLREF identycznych z osnową SAG i SW w tym:
195 punktów I klasy
14 punktów II klasy
160 punktów kierunkowych POLREF identycznych z osnową SAG i SW w tym:
150 punktów I klasy
14 punktów II klasy
Sieć WSSG została założona dla potrzeb automatycznej nawigacji. Składa się z 554 zespołów po 2 punkty (główny i bliźniaczy, czyli kierunkowy, w odległości 500-1000 m). Zespoły punktów znajdują się w pobliżu dróg krajowych i wojewódzkich (25-100 m od osi drogi), w odległości 25-30 km od siebie. Tylko część z nich została dowiązana do państwowego systemu wysokości Kronsztad '86 przy zachowaniu kryteriów niwelacji technicznej III klasy. Dla punktów użytecznych do modelowania geoidy niwelacyjnej wymagane było obliczenie wysokości elipsoidalnych, jednorodnych z układem EUVN (ITRF-96 na epokę 1997.4). Należy tu wyjaśnić, że wyrównanie WSSG pierwotnie zostało wykonane w nawiązaniu do stacji sieci globalnej IGS.
33.Omów układ współrzędnych 2000, 1992, UTM.
Układ "1992" - utworzony w oparciu o jednostrefowe dla obszaru Polski (w szerokim 10o pasie południkowym) odwzorowanie Gaussa - Krügera elipsoidy GRS-80 z południkiem osiowym (środkowym) Lo=19o i przy założeniu skali długości na tym południku (skali kurczenia) mo = 0.9993. Przyjęta skala aplikacyjna odwzorowania Gaussa-Krügera ma na celu kompromisowe rozłożenie liniowych zniekształceń odwzorowawczych, które wynoszą od -70 cm/km na południku środkowym do ok. +90 cm/km w skrajnych, wschodnich obszarach Polski. Współrzędne pełne w układzie 1992 oblicza się z formuł:
Układ "2000" jest złożony z czterech stref, z których każda powstała jako odwzorowanie Gaussa - Krügera elipsoidy GRS-80 w pasie południkowym 3o ze skalą kurczenia na południku osiowym każdej strefy mo = 0.999923. Dla kolejnych stref przyjęto następujące południki osiowe: 15o , 18o , 21o , 24o . Powstałe układy oznaczamy odpowiednio:
2000/15 2000/18 2000/21 2000/24
Współrzędne pełne (cechowane) w układzie 2000 wyznacza się z zależności:
Przyjęta skala na południku środkowym każdej strefy oznacza, że zniekształcenia odwzorowawcze na tym południku wynoszą -7.7 cm/km. Na styku sąsiednich stref w obszarze Polski wynoszą one maksymalnie ok. + 7 cm/km. Układ 2000 jest przeznaczony dla map gospodarczych wielkoskalowych.
Wymień przykłady zastosowania GPS.
Wyszukiwarka
Podobne podstrony:
satelitarna opracowanie, PYTANIA NA EGZAMIN Z GEODEZJI SATELITARNEJ
PYTANIA NA EGZAMIN Z GEODEZJI SATELITARNEJ, Geodezja, 03sem, ges
Przykładowe pytania na egzamin z geodezji II, AGH, Geodezja II
Pytania na egzamin z geodezji
Przykładowe pytania na egzamin z geodezji II, AGH, Geodezja - AGH
Pytania na egzamin z filozofii wraz z opracowaniem, Filozofia(1)
pytania na egzamin z chemii kosmetycznej opracowania
Przykładowe pytania na egzamin z geodezji II, GEODEZJA, Geodezja 1
Pyt przyklad z Geod IS WSZS12, Geodezja, Opracowane pytania na egzamin
Medycyna Katastrof pytania na egzamin (opracowane)
1.Rodzaje i geneza gruntów budowlanych, Opracowane pytania na egzamin
Pytania na egzamin do opracowania
Opracowane pytania na egzamin z TWN u
opracowane pytania na egzamin
opracowane pytania na egzamin, Zootechnika SGGW, semestr VI, rozród
opracowane pytania na egzamin, 1
Opracowane pytania na egzamin z fizy
4. Ruch wody w gruncie, Opracowane pytania na egzamin
POLITYKA GOSPODARCZA - opracowane pytania, POLITYKA GOSPODARCZA - PYTANIA NA EGZAMIN
więcej podobnych podstron