Nośnikami prądu elektrycznego mogą być elektrony, jony bądź dziury, czyli puste miejsca po elektronach. W metalach swobodnie przemieszczają się jedynie elektrony, dlatego prąd elektryczny w metalach jest ruchem elektronów przewodnictwa. W półprzewodnikach nośnikami prądu są elektrony i dziury. W rozrzedzonych gazach nośnikami ładunku elektrycznego są elektrony i jony.
Natężenie prądu elektrycznego I definiuje się jako stosunek ładunku elektrycznego q, który przepływa przez poprzeczny przekrój przewodnika, do czasu t przepływu tego ładunku:
Jednostką natężenia prądu elektrycznego w układzie SI jest amper [A]. Bardzo często używa się tego wyrażenia zamiennie z natężeniem prądu.
2. Prawo Ohma natężenie prądu stałego I jest proporcjonalne do całkowitej siły elektromotorycznej w obwodzie zamkniętym lub do różnicy potencjałów (napięcia elektrycznego) między końcami części obwodu niezawierającej źródeł siły elektromotorycznej:
Zatem wzór przyjmuje najczęściej używaną postać:
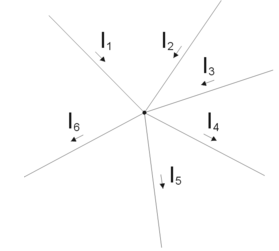
Prawo Kirchoffa: suma algebraiczna wszystkich natężeń prądów dopływających do rozgałęzienia jest równa zeru.
2 prawo Kirchoffa: suma napięć źródłowych w oczku obwodu elektrycznego równa się sumie spadków napięć na rezystancjach oczka.
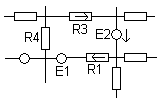
E1-U1+E2+U3-U4=0
E1-I1R1-E2-I3R3-I4R4=0
3. Moc prądy elektrycznego jest to stosunek energii (pracy) do czasu.
Moc jest liczbowo pracy wykonanej albo energii wydatkowanej w jednostce czasu.
Moc elektryczna jest równa iloczynowi napięcia i prądu P=U*I [W] [1W]=[1J/s]
Moc czynna P=U*I*cosφ
Moc bierna Q=U*I*sinφ
Moc pozorna S=U*I
Pracę wykonaną przez siły elektryczne przy przenoszeniu ładunku podczas przepływu prądu nazywamy pracą prądu elektrycznego. Jest ona równa iloczynowi napięcia, natężenia prądu i czasu jego przepływu.
W = U * I * t
[W] = 1J = 1VAs = 1Ws co po przeliczeniu możemy wyrazić w [kWh]
4. Za obwód elektryczny będziemy uważać takie połączenie elementów ze sobą, że istnieje możliwość przepływu prądu w tym połączeniu.
Gałąź obwodu jest tworzona przez jeden lub kilka elementów połączonych za sobą w określony sposób. Węzłem obwodu jest zacisk będący końcówką gałęzi do którego można dołączyć następną gałąź lub kilka gałęzi. Gałąź obwodu tworzą elementy ograniczone dwoma węzłami. Oczko obwodu to zbiór gałęzi połączonych ze sobą i tworzących drogę zamkniętą dla prądu elektrycznego. Oczko ma tę właściwość, że po usunięciu dowolnej gałęzi ze zbioru pozostałe gałęzie nie tworzą drogi zamkniętej. Element jest częścią składową obwodu niepodzielną pod względem funkcjonalnym bez utraty swych cech charakterystycznych. Na elementy obwodu składają się źródła energii elektrycznej oraz elementy akumulujące energię lub rozpraszające ją.
5. W połączeniu szeregowym elementów koniec jednego elementu jest bezpośrednio połączony z początkiem następnego.
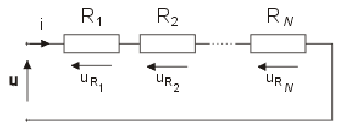
Rezystancja zastępcza R jest równa:
R=R1+R2+…+RN
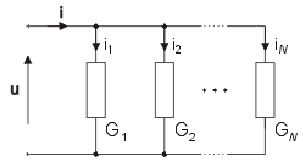
W połączeniu równoległym początki i końce wszystkich elementów są ze sobą bezpośrednio połączone, jak na rysunku.
Przy 2 rezystorach
6. Prawo indukcji elektromagnetycznej polega na powstawaniu siły elektromotorycznej w dowolnym obwodzie przy zmianie strumienia magnetycznego skojarzonego z obwodem. Siła elektromagnetyczna powstaje niezależnie od tego czy zmiana ta wynika ze zmiany strumienia magnetycznego skojarzonego w czasie.
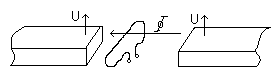
Warunki: nieruchomy przewód w zmiennym polu magnetycznym, ru7chomy przewód w polu stałym.
7. Indukcja własna (samoindukcja)- polega na indukowaniu się elektromotorycznej w cewce pod wpływem zmian prądu płynącego przez tę cewkę.
Siła elektromotoryczna indukcji własnej jest proporcjonalna do szybkości zmian prądu w czasie
wielkość ta nazywa się indukcyjnością własną cewki.
Indukcja wzajemna- polega na indukowaniu się siły elektromotorycznej w cewce pod wpływem zmian prądu w innej cewce z nią sprzężonej ( pole magnetyczne jednej z nich przenika choćby częściowo przez cewkę drugą). Gdy prąd płynie tylko w cewce 1 to:
a gdy prąd płynie tylko w cewce 2, to
; M- indukcyjność wzajemna
8. Rodzaje prądów zmiennych.
Prąd zmienny- prąd elektryczny gdzie natężenie i biegunowość zmieniają się w funkcji czasu
Prąd przemienny- prąd zmienny okresowo, którego wartość średnia wynosi zero w przedziale.
9. Napięcie sinusoidalne zmienne- wielkości charakteryzujące
- pulsacja prądu zmiennego
- częstotliwość f
- okres
- wartość max (amplituda)
10. Wartość średnia i skuteczna prądu sinusoidalnie zmiennego
Wartość skuteczna danego prądu sinusoidalnego jest równa pierwiastkowi kwadratowemu ze średniej kwadratów obliczonej dla całego okresu
Wartość średnia
Jest to wartość prądu stałego, który płynąc przez pół okresu przeniesie taki sam ładunek, jak dany prąd sinusoidalny
11. Szeregowe i równoległe połączenie elementów RLC- impedancja zastępcza, trójkąt impedancji, wykresy wskazowe.
W szeregowym połączeniu ten sam prąd I płynie przez wszystkie elementy, a napięcie zasilające Uz jest sumą geometryczną spadków napięć UR, UL, UC poszczególnych elementów.
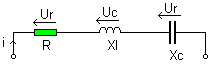
Rezystancja zastępcza ukł. Szereg. Dowolnej liczby rezystorów jest równa sumie ich rezystancji.
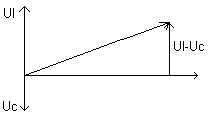

Wykres wektorowy prądu i napięć

Trójkąt impedancji
W równoległym połączeniu napięcie U jest takie samo na poszczególnych elementach, a prąd I pobierany ze źródła jest sumą geometryczną prądów IR IL IC płynących przez te elementy
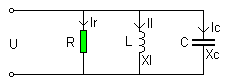
I=IR+IL+IC
U=UR=UL=UC
Wykres prądów taki jak wyżej dla napięć tylko U zmienić na I
12. Moc prądu przemiennego, trójkąt mocy.
Moc czynna P=U*I*cosφ [W]
Moc bierna Q=U*I*sinφ [war]

Moc pozorna S=U*I iloczyn wartości skutecznej napięcia i prądu sinusoidalnego [V*A]
13. Napięcie trójfazowe.
gwiazda
If=Imf
Umf=√3Uf
Trójkąt
Umf=Uf
Imf=√3If
14. Układ jednego watomierza- stosuje się przy symetrycznym obciążeniu, gdy moce pobierane we wszystkich fazach są jednakowe. Można wtedy zmierzyć moc w dowolnej fazie i wskazania watomierza pomnożyć przez 3 P=3Uf*If*cosφ
Układ 3 watomierzy- mierzą moc czynną w trzech fazach. Polega ta metoda na tym, że cewki prądowe są włączone szeregowo w każdą fazę, a cewki napięciowe na Uf odpowiedniej fazy.
Moc układu trójfazowego jest równa sumie mocy mierzonych przez trzy watomierze.
Układ dwóch watomierzy tzw. Układ Arona jest stosowany do pomiaru mocy czynnej ukł. Trójfazowych trójprzewodowych. Układ można stosować, wtedy gdy w sieci suma wartości chwilowych prądów przewodowych jest równa 0.
Układ Arona polega na ty, że cewki prądowe oraz początki cewek napięciowych włącza się w dwie dowolne fazy, a końce cewek napięciowych przyłącza się do fazy pozostałej.
15. Stała miernika jest to stosunek zakresu pomiarowego np. amperomierza, woltomierza do max liczby działek skali miernika np. skali woltomierza.
Ia- zakres pomiarowy αmA- max liczba działek skali miernika
16. Transformator
Jest statycznym urządzeniem elektrycznym, działającym na zasadzie indukcji elektromagnetycznej wzajemnej. Zadaniem jest podwyższenie lub obniżenie napięcia co jest związane odpowiednio ze zmniejszeniem lub zwiększeniem prądu przy zachowaniu stałej częstotliwości. Składa się z uzwojenia pierwotnego i wtórnego i rdzenia magnetycznego.
Wielkości charakteryzujące to: SN- moc pozorna, U1N- nap. pierwotne, U2N-nap. wtórne, I0- prąd jałowy, P0- moc przy stanie jałowym, Uz- nap. zwarcia, Pz- moc zwarcia
17. Podział maszyn elektrycznych:
Ze względu na prąd: maszyny prądu stałego, prądu zmiennego, prądu przemiennego, generatory, silniki.
Ze względu na wielkość silników:
mikrosilniki- do 1 kW
makrosilniki- do kilkuset kW
niskonapięciowe, wysokonapięciowe
18. Rodzaje pracy maszyn elektrycznych wirujących.
Stan jałowy silnika występuje jeżeli na jego zaciskach panuje napięcie znamionowe a wał
nie jest obciążony momentem. Z sieci pobierany jest prąd wytwarzający strumień
magnetyczny i pokrywający straty jałowe. Wirnik wiruje z prędkością bardzo zbliżoną do
synchronicznej a wartość prądu w klatce jest bliska zeru.
Stan zwarcia
Silnik indukcyjny jest w stanie zawarcia jeżeli do uzwojenia stojana dołączone jest
napięcie znamionowe a wirnik jest nieruchomy. Prąd pobierany przez maszynę przekracza
kilka (kilkanaście) razy wartość znamionową i jest ograniczony jedynie rezystancją i
reaktancją rozproszeniową uzwojeń. Stan ten występuje naturalnie w pierwszej chwili po
bezpośrednim włączeniu silnika do sieci ale może spowodować cieplne uszkodzenie izolacji
uzwojeń stojana jeżeli występuje przez dłuższy okres czasu np.: po utknięciu maszyny. Z tego
względu stosuje się odpowiednie zabezpieczenia przetężeniowe odłączające napięcie jeżeli
prąd przekracza ustaloną wartość przez czas dłuższy od założonego.
Stan obciążenia znamionowego
W stanie znamionowego obciążenia wirnik obraca się z prędkością nieco mniejszą od
prędkości wirowania pola magnetycznego. Względna różnica tych prędkości zwana jest
poślizgiem. Typowa wartość poślizgu przy obciążeniu znamionowym wynosi
kilka, czasami kilkanaście procent. Wynika stąd, że na wirnik oddziałuje pole o częstotliwości
równej fr=sfs.
19. Charakterystyka elektromechaniczna to zależność obrotów wirnika n w funkcji momentu M lub, przy stałej wartości prądu wzbudzenia Iw, w funkcji prądu It. Jeżeli napięcie zasilające wirnik ma wartość znamionową U=UN oraz prąd wzbudzenia jest znamionowy Iw=IwN, to charakterystyka elektromechaniczna nosi nazwę charakterystyki naturalnej.
20. Typy maszyn prądu stałego
Silnik
- obcowzbudne
Rodzaj pracy:
*prądnicowa It=I
*silnikowa It=I
-bocznikowa
*prądnicowa It=I+Iw
*silnikowa It=I-Iw
-szeregowa
*prądnicowa It=I=Iw
*silnikowa It=I=Iw
- szeregowo- bocznikowa
Wyszukiwarka
Podobne podstrony:
9 PODZIAú TEMATYCZNY ZAJ Ă
ZZL USWyklad 1 Wprowadzenie do tematyki
2014 AON Gotowość obronna państwa zestawienie tematyczne
6 podzial tematyczny zadan
na egzamin opracowane 24 tematy
PRACA DYPLOMOWA BHP - ORGANIZACJA PRACY W PSP, TEMATY PRAC DYPLOMOWYCH Z BHP
Tematy ćwiczeń - SD, WAT, SEMESTR V, systemy dialogowe
tematy na teorie panstwa i prawa, EWSPIA kier. PRAWO, sem I
TEMATY NA ZAL WYK Z MASZYN 2013, Mazynoznastwo
przyroda naszym przyjacielem, różna tematyka
Serce ma swoje racje których rozum nie zna, SZKOŁA, język polski, ogólno tematyczne
miała baba koguta, Prezentacje, Bloki tematyczne do zajęć
Droga do Hogwartu, METODYKA, ZABAWY TEMATYCZNE
tematy POiZ, ZARZĄDZANIE
Szczegółowe tematy ćwiczeń Ped.Specj, Akademia Pedagogiki Specjalnej, rok I, Semestr II, biomedyczne
Tematy, dom, STUDIA, semestr I, Filozofia
Radość życia i cierpienia-dwa źródła i dwa tematy twórczości artystycznej, wszystko do szkoly
więcej podobnych podstron