2. STATYKA ELEKTRYCZNYCH UKŁADÓW NAPĘDOWYCH
Charakterystyki napędzanych urządzeń mechanicznych
Maszyny napędzane mają różne charakterystyki statyczne. Moment oporowy pochodzący od urządzenia napędzanego może być wielkością stałą lub zmienną. Zmienność momentu oporowego w funkcji czasu wiąże się przeważnie ze zmianami narzucanymi układowi elektromechanicznemu przez proces technologiczny. Moment oporowy może ulegać zmianom cyklicznym w funkcji drogi, jak to ma miejsce np. w mechanizmach o ruchu postępowo-zwrotnym, lub też może być zależny od prędkości obrotowej, jak np. w urządzeniach mechanicznych wirujących.
2.1.1. Maszyny napędzane o ruchu obrotowym
Maszyny napędzane o ruchu obrotowym charakteryzuje, między innymi, zmienność momentu oporowego w funkcji prędkości. Zależność momentu od prędkości nazywamy charakterystyką mechaniczną. Spotyka się urządzenia mechaniczne o różnorodnych charakterystykach mechanicznych. Większość, w przybliżeniu, urządzeń może być opisana wzorem ogólnym
(2.2)
W którym:
Mm0 - moment oporowy wywołany tarciem w częściach ruchomych,
Mmn - moment oporowy urządzenia przy prędkości znamionowej,
nn- prędkość znamionowa.
Wykładnik potęgowy X będzie miał zależnie od rodzaju urządzenia różne wartości. Należy zauważyć, że równanie (2.2) jest słuszne tylko wówczas, gdy n≠0. Jeżeli prędkość jest równa zeru, będzie występował inny moment oporowy niż Mm0, wywołany tarciem spoczynkowym. Moment ten w typowych łożyskach maszynowych jest większy od momentu tarcia ruchowego.
Można wyróżnić cztery grupy maszyn napędzanych, które opisane równaniem (2.2), różnić się będą wykładnikiem potęgowym X.
Gdy X = 0, moment oporowy jest niezależny od prędkości wirowania (krzywa 1 na rys. 2.1). Do tej grupy należą takie urządzenia mechaniczne jak suwnice, dźwigi, maszyny wyciągowe, obrabiarki, walcarki, przenośniki taśmowe.
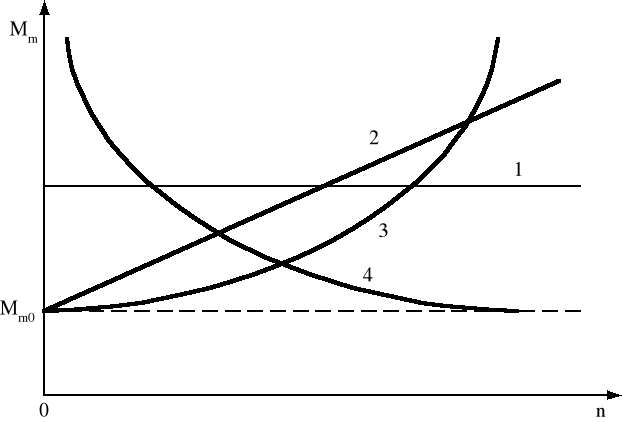
Rys. 2.1. Charakterystyki mechaniczne typowych urządzeń mechanicznych
Gdy X = 1 moment oporowy zmienia się liniowo w funkcji prędkości (krzywa 2 na rys. 2.1). Taką charakterystykę mechaniczną będzie miała obcowzbudna prądnica prądu stałego, obciążona stałą rezystancją.
Gdy X=2 uzyskuje się charakterystykę mechaniczną w kształcie paraboli (krzywa 3 na rys.2.1).
Do tej grupy należą urządzenia oparte na zasadzie siły odśrodkowej, a mianowicie pompy odśrodkowe, wentylatory, turbosprężarki, śruby okrętowe. Taką charakterystykę nazywamy w praktyce wentylatorową.
Gdy X=−1 uzyskuje się charakterystykę mechaniczną w kształcie hiperboli (krzywa 4 na rys.2.1). Tego typu charakterystykę wykazują urządzenia do nawijania i rozwijania taśm i wstęg, spotykane w przemyśle hutniczym, włókienniczym, papierniczym, węglowym itp. Z punktu widzenia technologicznego wymaga się, aby siła naciągu na obwodzie bębna zwijarki lub rozwijarki i prędkość styczna były wielkościami stałymi. W miarę jak wzrasta promień nawijania, prędkość obrotowa powinna maleć a moment oporowy będzie wzrastał.
Poza podanymi wyżej przebiegami typowymi, możliwe są przypadki pośrednie. Przy bardzo dużych prędkościach, np. w wirówkach lub turbodmuchawach o prędkościach rzędu n=105obr/min, współczynnik potęgowy X może być większy niż dwa i może osiągnąć wartość czterech.
2.1.3. Urządzenia mechaniczne o momencie aktywnym i reaktywnym.
Istnieje jeszcze jedno kryterium podziału urządzeń napędzanych ze względu na rodzaj momentu oporowego. Moment oporowy urządzeń, które bez względu na kierunek ich wirowania są zawsze odbiornikami energii mają moment oporowy nazywany momentem reaktywnym. Charakterystyka Mm=f(n) takiego urządzenia na płaszczyźnie przebiega przez ćwiartkę pierwszą i trzecią, moc bowiem, która jest proporcjonalna do iloczynu momentu oraz prędkości przy obu kierunkach wirowania jest dodatnia. Moment oporowy reaktywny wykazuje np. urządzenie jazdy w poziomie mostu suwnicowego; przebieg jego jest pokazany na rys. 2.2.
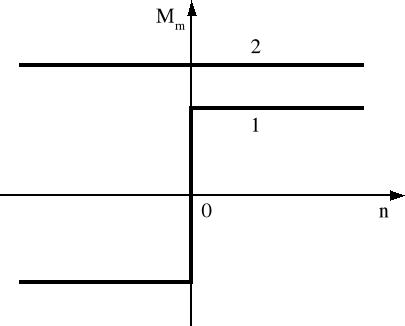
Rys. 2.2. Momenty oporowe: reaktywny (1) i aktywny (2)
W praktyce spotykamy również urządzenia mechaniczne o zmiennej energii potencjalnej. Dla przykładu rozpatrzymy pracę wciągarki w urządzeniach transportu pionowego. W trakcie podnoszenia ciężaru wzrasta jego energia potencjalna. Urządzenie jest odbiornikiem energii. Przy zmianie kierunku wirowania, w trakcie opuszczania ciężaru, mechanizm staje się wydajnikiem energii. Stąd wniosek, że ze zmianą kierunku wirowania zmienia się znak mocy na wale, a więc znak momentu oporowego nie ulega zmianie. Taki moment to moment aktywny. Przebieg momentu oporowego aktywnego wciągarki pokazano na rys. 2.2.
Charakterystyki mechaniczne silników elektrycznych i ich formatowanie
Zależności między momentem elektromagnetycznym rozwijanym przez silnik a prędkością obrotową wału silnika M=(n) nazywamy charakterystyką mechaniczną. W niektórych przypadkach wygodniej jest operować zależnością n=f(M). Charakterystyką mechaniczną nazywać również będziemy zależność pomiędzy rozwijanym momentem a poślizgiem silnika M=f(s).
Rozróżniamy charakterystyki mechaniczne naturalne i sztuczne. Charakterystyką mechaniczną naturalną nazywamy taką charakterystykę, która występuje przy znamionowych parametrach sieci zasilającej, przy normalnym włączeniu oraz braku elementów dodatkowych w obwodach elektrycznych. Wszystkie inne charakterystyki mechaniczne nazywamy sztucznymi.
Każda charakterystyka mechaniczna silnika ma pewne punkty szczególne, odpowiadające np. rozruchowi, prędkości idealnego biegu jałowego, stabilności układu.
Znajomość kształtu charakterystyki mechanicznej silnika i jej punktów szczególnych jest konieczna przy analizie statyki i dynamiki układu elektromechanicznego. Można, zmieniając elektryczne wielkości zewnętrzne wpływać na kształt charakterystyki mechanicznej, tzn. można ja odpowiednio formować (kształtować) i wtedy uzyskuje się całą rodzinę charakterystyk sztucznych, z których się korzysta przy regulacji układu elektromechanicznego.
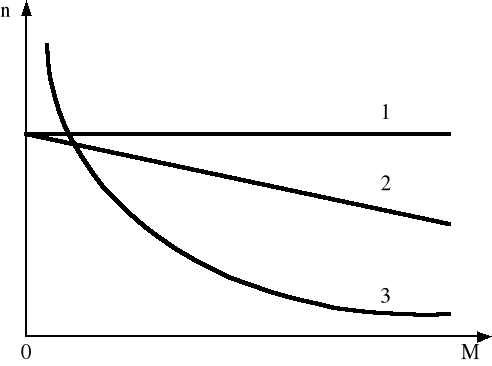
Rys. 2.3. Charakterystyki mechaniczne silników elektrycznych: 1 - idealnie sztywna, 2 - sztywna, 3 - podatna
Zasadniczo spotykamy się z trzema rodzajami charakterystyk mechanicznych silników elektrycznych, a mianowicie: idealnie sztywną, sztywną i podatną (rys. 2.3).
Prędkość obrotowa silnika o charakterystyce mechanicznej idealnie sztywnej jest stała i nie zależy do wielkości rozwijanego momentu. Taką charakterystykę mają silniki synchroniczne.
Jeżeli ze wzrostem obciążenia prędkość obrotowa silnika maleje nieznacznie, praktycznie biorąc liniowo i mówimy wtedy, że charakterystyka mechaniczna silnika jest sztywna. Do grupy tej zaliczmy silniki bocznikowe prądu stałego, silniki asynchroniczne i silniki bocznikowe komutatorowe prądu przemiennego. Taką charakterystykę nazywamy często bocznikową.
Jeżeli ze wzrostem obciążenia prędkość maleje bardzo znacznie, prawie hiperbolicznie, mówimy, że charakterystyka mechaniczna takiego silnika jest podatna (miękka).
Charakterystykę mechaniczną podatną mają silniki szeregowe prądu stałego i komutatorowe prądu przemiennego, jednofazowe oraz trójfazowe.
Wyszukiwarka
Podobne podstrony:
Wyklad 1, Semestr VII, EUT, Eksploatacja układów technicznych, Wykłady, materialy od zielinskiej, Zi
Opracowanie pytań ściąga, Semestr VII, Semestr VII od Grzesia, Eksploatacja układów technicznych. Wy
Rozruch silnika trójfazowego pierścieniowego, Semestr VII, Semestr VII od Grzesia, Eksploatacja ukła
ściąga uklad leonarda, Semestr VII, Semestr VII od Grzesia, Eksploatacja układów technicznych. Wykła
Wnioski sprawozdania - Lab 2, Politechnika Wrocławska - Inżynieria Lotnicza, Semestr VII, Podstawy e
Strona tyt sprawozdania - Lab 2, Politechnika Wrocławska - Inżynieria Lotnicza, Semestr VII, Podstaw
KOMUNIKACJA- skrót wykładów, materiały od Bartosza Wróblewskiego, komunikacja
dr M.Latos-Miłkowska Zwolnienia grupowe konspekt wykładu, materiały od wykładowców
EPS semestr VI, Politechnika Warszawska Wydział Transportu, Semestr VII, Eksploatacja Pojazdów Samoc
Materiały EPS, Politechnika Warszawska Wydział Transportu, Semestr VII, Eksploatacja Pojazdów Samoch
biotechnologia wykład pytania, Ogrodnictwo, Semestr VII, Biotechnologia
ZAGADNIENIA NA EGZAMIN Z MECHANIKI TECHNICZNEJ II DLA SEMESTRU III, sem III, +Mechanika Techniczna I
Wykład 1 psychologia małżeństwa i rodziny - Plopa 2011, SEMESTR VII, Psychologia małżeństwa i rodzin
Wykład II - Rynek usług transportowych, Politechnika Warszawska Wydział Transportu, Semestr VII, Tka
BIOTECHNOLOGIA wyklady przepisane, Ogrodnictwo, Semestr VII, Biotechnologia
Ekonomia wyklady, Ogrodnictwo, Semestr VII, Ekonomika, Ekonomika, Ekonomika
biotechnologia wykład test - pytania nie powtarzajace sie, Ogrodnictwo, Semestr VII, Biotechnologia
więcej podobnych podstron