
Państwowa Wyższa Szkoła Zawodowa
w Lesznie
Instytut Politechniczny
Laboratorium z
Automatyki Systemowej
Temat: Modelowanie podstawowych członów dynamicznych automatyki oraz sprawdzanie odpowiedzi tego układu na wymuszenie skokowe i impulsowe.
Prowadzący: Wykonał:
Sławomir Stępień Marek Jańczak
Ocena:
..................
OPIS UKŁADU DYNAMICZNEGO TYPU WEJSCIE - WYJŚCIE
an ![]()
+ an-1![]()
+ ...+ an + aoy = bm ![]()
+ bm-1![]()
+ ...+ b1ń + bou
u(t) y(t)
u(0+) = 0 y0+) = 0
. ŷ0+) = 0
. .
. .
u(n-1)(0+) = 0 y(n-1)(0+) = 0
£[u(t)] = ![]()
e-stdt = U(s) ; £[y(t)] = ![]()
e-stdt = Y(s)
ansnY(s) + an-1sn-1Y(s)+…+a1sY(s) + a0Y(s) = bmsmU(s) + bm-1sm-1U(s)+…+b1sU(s) + b0U(s)
Y(s)[ ansn +…+a1s + a0] + U(s)[ bmsm+...+b1s+b0]
G(s)![]()
=
Transmitancja układu dynamicznego(operatorowa), jest to stosunek transformaty Laplace'a obiektu wyjściowego, do transformaty Laplace'a sygnału wejściowego przy zerowych warunkach początkowych.
1.
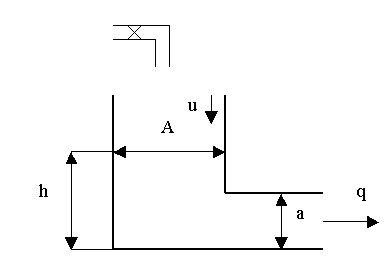

q(t) = a·v(t)
v(t) = ![]()
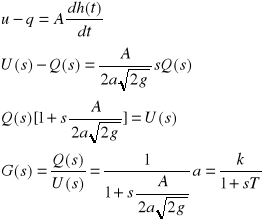
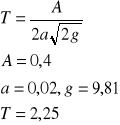
Transmitancja układu:
![]()
Równanie stanu
Równanie wyjścia
y = cx + du
y =x
A = [![]()
]; B = [![]()
]; C = [1]; D = [0];

2.
i(t) R L
![]()
Mop
J
ω
u(t) e(t) Mnap
u(t) = Ri(t) + L![]()
+ e(t)
Mnap - Mop = J·![]()
e(t) = k· ω(t)
Mnap(t) - Mop(t) = ![]()
Mnap(t) = k· i(t)
u-e = R·i + L
U(s) - E(s) = (R+sL)I(s)
![]()
=
x = Ax + Bu
![]()
= ![]()
![]()
= ![]()
ω = x1 x1=![]()
i = x2 x2 = - ![]()
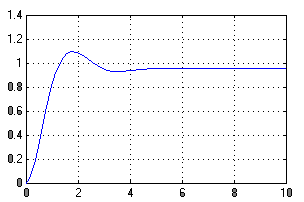
R = 1Ω; L = 0,5H; k = 1; J = 50
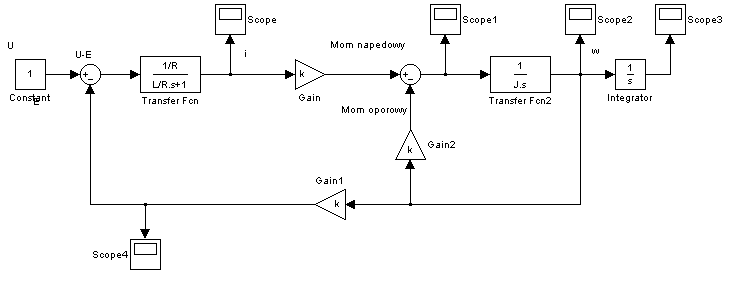
Oscyloskop Oscyloskop1
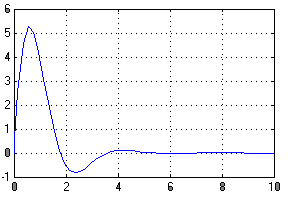
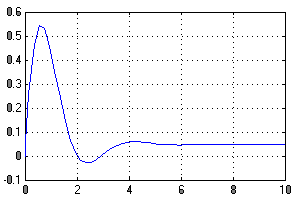
Oscyloskop2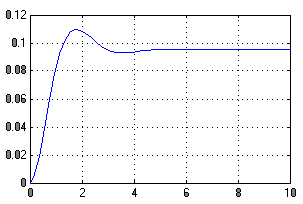
Oscyloskop3
Oscyloskop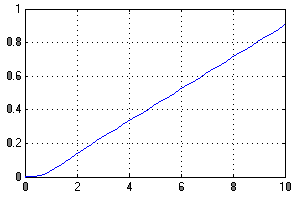
4
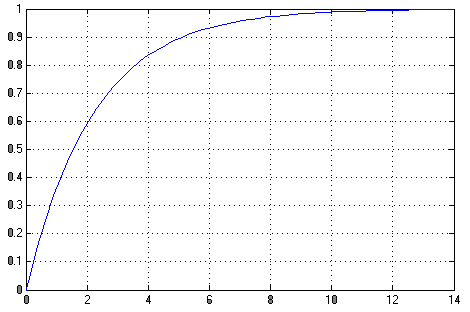
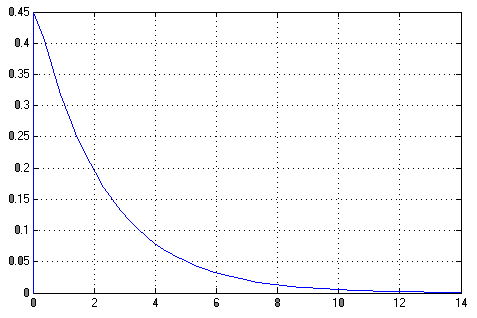
Wnioski:
M
Wyszukiwarka
Podobne podstrony:
Labolatoria Automatyzacja Pomiarów
WYDZIA~1, Labolatoria fizyka-sprawozdania, !!!LABORKI - sprawozdania, Lab, !!!LABORKI - sprawozdania
LABORKA2, Biotechnologia, Fizyka, Labolatorium
Tab 65, Studia, 1 rok, od Magdy, FIZYKA, Fizyka, Labolatorium
Ćwiczenie nr 50b, sprawozdania, Fizyka - Labolatoria, Ćwiczenie nr50b
03 - Pomiar twardości sposobem Brinella, MiBM Politechnika Poznanska, IV semestr, labolatorium wydym
Ćwiczenie 71, Studia, 1 rok, od Magdy, FIZYKA, Fizyka, Labolatorium
Szkoło labolatoryjne i jego przeznaczenie nieorganiczne, CHEMIA
307 (2), Politechnika Poznańska (PP), Fizyka, Labolatoria, fiza sprawka, optyka
LEPKOŚĆmm, Biotechnologia, Fizyka, Labolatorium
Doświadczalne spr p. Malusa, sprawozdania, Fizyka - Labolatoria, Ćwiczenie nr70
Fizyka 25a, Labolatoria fizyka-sprawozdania, !!!LABORKI - sprawozdania, 25 - Interferencja fal akust
Jednomodowe czujniki interferencyjne, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok 2, P
osir labolatoriun 1
CW Labolatoryjne Podstawowe prawa teorii obwodw
Labolatorium 2 sprawozdanie
Labolatorium Wymiany Ciep
Labolatorium obróbki skrawaniem szlifowanie (ATH)
więcej podobnych podstron