Marczuk Robert
KL. V TK1
TEMAT: Rola przetworników C/A i A/C w technice cyfrowej.
Realizacja przetwornika magnetycznego i indukcyjnego.
We współczesnych układach i systemach elektronicznych często zachodzi konieczność przetwarzania informacji zarówno analogowej, jak i cyfrowej. Ma to na istotne znaczenie, gdy informacja będąca w naturalny sposób analogowa, jak np. sygnały akustyczne, wizyjne, pomiarowe itp. powinna być sterowana lub obrabiana za pomocą systemów mikroprocesorowych lub komputerowych. Należy wówczas sygnał sterujący przetworzyć z postaci cyfrowej na analogową, aby móc np. regulować wzmocnienie lub pasmo układu analogowego, stosując układy mnożące.
Podobnie, jeśli sygnał akustyczny chcemy zapisać w systemie cyfrowym lub dokonać jego obróbki za pomocą filtru cyfrowego, musi on być najpierw przetworzony na postać cyfrową.
Czynności tych dokonuje się za pomocą przetworników cyfrowo-analogowych (ang. Digital to analog converters -DAC) oraz analogowo-cyfrowych (ang. Analog to digital converters -ADC)
Jak każdy układ elektroniczny, wprowadzają one zniekształcenia sygnału i ograniczenie ilości zawartej w nim informacji. Spotyka się więc wiele realizacji przetworników, różniących się złożonością i dokładnością.
Przetwornik cyfrowo-analogowy jest układem elektronicznym o n wejściach, do których jest doprowadzane n-bitowe słowo cyfrowe będące informacją przetwarzaną, oraz o jednym, wyjściu, na którym jest otrzymywana przetworzona informacja analogowa. Słowo cyfrowe jest z reguły interpretowane jako liczba w naturalnym kodzie dwójkowym i napięcie wyjściowe jest proporcjonalne do tej liczby. W związku z tym, zależność między wejściem a wyjściem przetwornika C/A może być zapisana następująco:
Wzór 1.
przy czym Uref jest napięciem odniesienia, a1...an są bitami wejściowymi i mogą przyjmować wartość 1 lub 0. Znak zależy od tego, czy układ odwraca fazę bądź jej nie odwraca. Gdy wszystkie bity wejściowe są na poziomie jedynki logicznej wówczas:
Wzór 2.
Ze wzoru nr 1. wynika, że najmniejsza zmiana sygnału wyjściowego jest :
dU=Uref/2n, nie jest to więc sygnał ciągły. Bit a1 nazywa się najbardziej znaczącym bitem (ang. Most significant bit -MBS ), an zaś- najmniej znaczącym bitem (ang. Least significant bit -LBS).
Następujące parametry opisują przetworniki cyfrowo-analogowe:
-Rozdzielczość, wyrażana w woltach, jest to najmniejsza zmiana napięcia wyjściowego &U. Dla przetwornika 8- bitowego i napięcia Uref =5V wynosi ona ok. 20mV
-Błąd bezwzględny, wyrażany w woltach, jest największą różnicą między napięciem wyjściowym zmierzonym a idealnym otrzymanym ze wzoru nr 1
-Błąd względny jest błędem odniesionym do całej skali przetwornika, tzn. do Uref. Często też błąd względny odnosi się do rozdzielczości, tj. do napięcia &U odpowiadającego LBS.
Błędy przetwornika to szczególnie błędy nieliniowości, które można podzielić na:
-błąd różniczkowy, który określa największe odchylenie poszczególnych zmian napięcia wyjściowego od wielkości &U.
-błąd całkowy, który jest największym odchyleniem względnym wartości Uout od charakterystyki idealnej.
-błąd skalowania -wynika z błędu wartości napięcia Uref.
-błąd przesunięcia wynikający ze znierównoważenia wzmacniacza .
Kilka innych istotnych parametrów charakteryzujących przetworniki C/A to:
-stałość charakterystyki przetwornika przy zmianach temperatury i zasilania
-czas ustalania się odpowiedzi będący opóźnieniem uzyskania sygnału analogowego na wyjściu względem zmiany na wejściu cyfrowym. Czas ten zawiera się w granicach od kilkudziesięciu do kilku mikro sekund.
-przepięcia będące wyskokami wartości napięcia wyjściowego w czasie ustalania się odpowiedzi, wynikające z różnych opóźnień poszczególnych bitów. Można je wyeliminować, stosując na wyjściu przetwornika układ próbkująco - pamiętający, pobierający próbkę napięci wyjściowego po jego ustaleniu.
Przetwornik cyfrowo-analogowy ma cztery podstawowe części:
układ deszyfrujący poszczególne bity, tzn. Dzielący napięcie odniesienia odpowiednio przez 2 do potęgi k, jest to na ogół sieć rezystorów;
klucze włączające wartości bitów ak=0 lub ak=1;
napięcie odniesienia Uref;
wzmacniacz operacyjny.
Na rysunku 1 przedstawiłem dwie wersje jednego z najprostszych rozwiązań przetwornika C/A: z przełączeniami prądowym oraz napięciowym. W obu przypadkach na wejściu wzmacniacza operacyjnego są sumowane prądy z poszczególnych rezystorów R, 2R, itd., jeżeli odpowiedni przełącznik a1....an znajduje się pozycji prawej. Odpowiada to bitowi wejściowemu w stanie jedynki logicznej. Pozycja lewa odpowiada zerowej wartości bitu i odpowiedni prąd nie wpływa do wejścia wzmacniacza.
Rys.1
Najprostsze przetworniki C/A: z przełączaniem prądowym (a) oraz z przełączaniem napięciowym (b).
Wzmacniacz operacyjny pracuje w tym przypadku jako sumator analogowy, stąd, na podstawie wyników rozważań otrzymuje się:
Wzór 3.
Przy przełączaniu prądowym przez rezystory płynie zawsze taki sam prąd bez względu na położenie klucza, gdyż wejście odwracające wzmacniacza jest na potencjale ziemi wirtualnej. Na niskim poziomie napięcia znajdują się również klucze. Rozwiązanie to zapewnia mały wpływ pojemności pasożytniczych, a przez to szybsze działanie układu niż w przypadku przełączania napięciowego.
Rys.2
Różne rozwiązania kluczy przełączających w przetwornikach C/A
Istotnym elementem przetwornika C/A jest klucz analogowy sterowany jednym bitem cyfrowego słowa wejściowego. Na rysunku 2 przedstawionych jest kilka rozwiązań kluczy. Układy (a,b) stosują tranzystory MOS i są dostosowane do przetworników z przełączeniem napięciowym. Pierwszy z nich ma oba tranzystory z kanałem typu N, drugi stosuje technikę CMOS. Przełączają one rezystor wejściowy wzmacniacza operacyjnego do wejścia wzmacniacza lub do masy. Dobierając odpowiednio napięcie polaryzujące UB, można zmniejszyć różnicę napięć na wejściu a odpowiadających zeru i jedynce logicznym do kilkuset mV. Taki klucz jest szybszy, gdyż mniejsze są zmiany ładunku na pojemnościach pasożytniczych; utrzymuje on potencjał emiterów na mało zmieniającym się potencjale, co zapewnia lepszą stałość prądu I .
Najprostsze przetworniki C/A mają istotną wadę: wymagają zastosowania rezystorów o bardzo różniących się wartościach, dla 8-bitowego przetwornika stosunek największej do najmniejszej rezystancji wynosi w tym przypadku 2, a więc znacznie łatwiej je wykonać w postaci scalonej i uzyskuje się lepsze tolerancje względne i jednakowe zależności temperaturowe.
Z rys.1 można wyciągnąć wnioski dotyczące źródeł błędów przetwarzania przetworników C/A. Najistotniejszym są niedokładne wartości rezystorów, co prowadzi do współczynników wagowych. Szczególnie krytyczny jest przypadek w którym następuje zmiana słowa wejściowego ze stanu 011...1 na stan 100...0. Następuje to w środku charakterystyki przetwarzania. Zmiana napięcia na wyjściu powinna w tym przypadku wynosić tylko &U=Uref/2do n-tej., następuje tu jednak kumulacja błędów na wszystkich bitach przetwornika. W tym najkrytyczniejszym punkcie błąd może przekroczyć &U i charakterystyka staje się wtedy niemonotoniczna. Względna dokładność rezystorów jest więc najistotniejszym z kryteriów w jakości przetwornika C/A, przemawia to za stosowaniem drabinki rezystorowej, a nie rezystorów o ważonej współczynnikiem 2 do potęgi k wartości. Od dokładności rezystorów zależy liczba bitów n, którą można zrealizować utrzymując błędy nieliniowości na rozsądnym poziomie.
Błąd skalowania zależy od wzmocnienia wzmacniacza, a więc od wartości rezystora w gałęzi sprzężenia zwrotnego. Błąd przesunięcia zależy od napięcia i prądu niezrównoważenia wzmacniacza.
Częstotliwość graniczna wzmacniacza oraz stała czasowa rezystancji i pojemności pasożytniczych decydują o czasie ustalania się odpowiedzi.
Współczesne przetworniki cyfrowo-analogowe mają rozbudowane układy cyfrowe na wspólnej strukturze krzemowej. Przykładem może być 16-bitowy podwójny przetwornik TDA1543 firmy Philips, mający rejestry danych cyfrowych ładowane szeregowo, co wymaga jednego tylko zacisku wyjściowego bitowego. Blok sterownia i synchronizacji kontroluje pracę części cyfrowej układu.
Dla lepszego zobrazowania charakterystyki przedstawianych przetworników naszkicuję pobieżny schemat niektórych parametrów. Będą to:
właściwości różnych realizacji przetworników C/A.
Tabela 1
Rezystory
|
Rezystancja na kwadrat |
Współczyn. napięciowy |
Współczyn. temperaturowy |
Współbieżność temperaturowa |
Liczba bitów |
Rezystory dyfuzyjne |
200Ω |
250*10 |
1500*10 |
±15*10 |
8 |
Rezystory implantowane |
1-2 kΩ |
(300-800)*10 |
1000*10 |
±10*10 |
10 |
Rezystory cienkowarstwowe |
2 kΩ |
0 |
150*10 |
±1*10 |
12 |
Przetwornik analogowo-cyfrowy jest układem elektronicznym o jednym wejściu, na które jest podawany sygnał analogowy, oraz o n wyjściach, na których znajduje się przetworzona informacja cyfrowa o sygnale wejściowym. Przetwarzania dokonuje się na ogół w naturalnym kodzie dwójkowym, tzn. Liczba dwójkowa odpowiadająca słowu wyjściowemu jest proporcjonalna do wartości sygnału analogowego.
Funkcję przejściową przetwornika A/C opisuje następujące wyrażenie :
przy czym UA jest sygnałem analogowym na wejściu Uref -napięciem odniesienia, równym maksymalnemu sygnałowi, gdy n dąży do nieskończoności a1...an-zerowymi lub jedynkowymi stanami bitów wyjściowych.
Jest oczywiste, że ze względu na nieciągłość prawej strony wyrażenia nie ma jednoznaczej odpowiedniości między wejściowym sygnałem analogowym a wyjściowym sygnałem cyfrowym.
Na rys.3 przedstawiona jest charakterystyka przetwornika A/C (przykładowo dla trzech bitów).
Charakterystyka jest tak przesunięta aby zmiany bitów wyjściowych następowały dla napięć oddalonych o ± 1/2 &U od napięć spełniających dokładnie zależności.
Podstawowym parametrem przetwornika A/C jest błąd kwantyzacji, który jest maksymalną odchyłką charakterystyki (Rys.4 ) rzeczywistej od idealnej. Błąd ten wynosi ±&U na osi napięciowej lub 1/2 LBS na osi bitów wyjściowych.
Rys.4
Zakresem dynamiki przetwornika A/C nazywa się stosunek maksymalnego napięcia analogowego do &U i wynosi 2 do potęgi n-tej. Zarówno błąd kwantyzacji jak i zakres dynamiki polepszają się przy wzroście liczby bitów n.
Bardzo istotne w działaniu przetwornika A/C są efekty skończonego czasu konwersji. Wartość wejściowego sygnału analogowego jest próbkowana co okres Tk w odstępach między próbkowaniami jest dokonywane przetwarzanie analogowo-cyfrowe. Częstotliwość próbkowania jest więc ograniczona szybkością działania przetwornika.
Dla poprawnego działania przetwornika między pobraniami kolejnych próbek sygnał analogowy nie powinien się zmieniać o wartość większą niż &U, tzn. Powinna być spełniona nierówność :
Dla uA=1/2 Uref sinϖAt największa wartość pochodnej wynosi 1/2ϖA Uref, stąd częstotliwość próbkowania :
Wartość częstotliwości próbkowania jest niepraktycznie duża, dlatego na wejściu przetwornika A/C stosuje się na ogół układ próbkująco-pamiętający, utrzymujący stałą wartość sygnału na wejściu między próbkami. Zgodnie z prawem Nyquista o próbkowaniu częstotliwość wynosi wówczas:
fk>2fAmax
gdzie fAmax jest największą częstotliwością w widmie sygnału.
Parametry przetworników A/C.
Tabela 2
Typ |
Wykonanie |
Czas przetwarzania |
Technologia |
Zastosowanie |
||||||
|
|
6 bit |
8 bit |
10 bit |
12 bit |
14 bit |
|
|
||
Podwójne całkowanie |
tanie średnie drogie |
- - - |
20 1 0,3 ms |
30 5 1 ms |
100 20 5 ms |
250 100 30 ms |
MOS MOS MOS |
multimetry
telemetria |
||
Sukcesywna aproksymacja |
tanie średnie drogie |
60 30 5 μs |
100 50 10 μs |
120 60 15 μs |
150 80 20 μs |
- - - |
MOS MOS bipol i MOS |
przyrządy pomiarowe przetwarzanie danych, telekomunikacja |
||
Równolegle |
średnie
drogie |
100
20 ns |
200
50 ns |
-
- |
-
- |
-
- |
MOS i bipol bipol |
przetwarzanie video, szybkie łącza. |
||
Przetworniki A/C realizowane są w postaci scalonej realizują najczęściej zasadę sukcesywnej aproksymacji. Wymaga to wykonania na jednej strukturze precyzyjnych układów analogowych oraz szybkich układów cyfrowych. Stosowana jest zarówno technologia bipolarna, jak i MOS i CMOS.
Szczególnie korzystną realizację można otrzymać w technice przełączanych pojemności. Służy ona nie tylko jako przetwornik C/A, lecz również jako rejestr dynamiczny MOS, przez co realizacja układu może być znacznie uproszczona. W okresach między włączeniami pojemności może być dokonywane zerowanie komparatora.
Realizacja przetwornika indukcyjnego i magnetycznego.
Do pomiaru przemieszczeń i innych wielkości nieelektrycznych dających się przetworzyć na przemieszczenie np. siły, prędkości, przyśpieszenia, drgań, stosuje się przetworniki indukcyjne, magnetyczne i pojemnościowe.
W przetworniku indukcyjnym, pod wpływem przemieszczenia się ruchomego rdzenia, zmienia się indukcyjność własna i wzajemna cewek. Ze względu na szereg zalet (np. samoczynna kompensacja wpływu zmiany temperatury i zmian częstotliwości) najbardziej są rozpowszechnione indukcyjne przetworniki różnicowe, w których przy przemieszczeniu rdzenia zmieniają się w sposób przeciwny (gdy jedna zwiększa się to druga maleje) dwie indukcyjności własne lub dwie indukcyjności wzajemne (przetworniki różnicowe transformatorowe). Z uwagi na konstrukcję obwodu magnetycznego można rozróżnić:
przetworniki z zamkniętym obwodem magnetycznym (nazywane też przetwornikami ze zworą), które mają obwód magnetyczny wykonany z materiału ferromagnetycznego i niewielką szczelinę powietrzną.
przetworniki z otwartym obwodem magnetycznym, które mają rdzeń przemieszczający się wewnątrz cewki, przy czym strumień magnetyczny zamyka się głównie przez powietrze, nadające się do pomiarów dużych pomieszczeń (powyżej 1mm, do 500mm, a nawet większych ).
Rys.1 Schemat indukcyjnościowego czujnika różnicowego ze zworą.
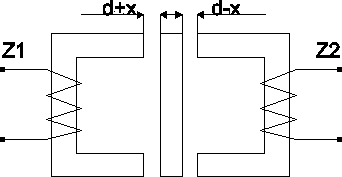
Przy symetrycznym położeniu zwory ( X=0), gdy szczeliny powietrzne &1 i &2 są jednakowe, strumienie magnetyczne również są jednakowe i jednakowe są indukcyjności oraz impedancje obu cewek. Gdy pojawi się np. Dodatnie przemieszczenie zwory (X>0), szczelina &1 zwiększa się, druga maleje. W związku z tym maleje strumień pierwszy oraz pierwsza indukcyjność i impedancja, zwiększają się odpowiednio druga indukcyjność, strumień i impedancja.
W praktyce do celów pomiarowych wykorzystuje się 0,6...0,8 długości szczeliny.
Przy większym przemieszczeniu charakterystyka czujnika jest bardzo nieliniowa. W rzeczywistości na skutek istnienia w napięciu wyjściowym wyższych harmonicznych, głównie trzeciej oraz składowej podstawowej przesuniętej w fazie o 90 stopni, spowodowanej nieuniknioną niesymetrią przetwornika, nie osiąga się idealnego zera, a zmiana fazy nie jest skokowa.
Zależność napięcia wyjściowego od parametrów elektrycznych przetwornika przedstawia następujący wzór.
W zakresie przemieszczeń rdzenia, w którym zachowana jest liniowa zależność M2-M1=cx , gdzie c oznacza stałą, liniowość funkcji U2 =f(x) zależna jest wyłącznie od mianownika prawej strony wzoru. Jak widać, główny wpływ ma opór obciążenia: dla R2→∞ ta zależność jest liniowa. W praktyce uzyskuje się nieliniowość nawet poniżej 0,1% zakresu pomiarowego.
Zasadą przetwarzania jest indukowanie SEM w obwodzie elektrycznym, który znajduje się w polu magnetycznym, wytwarzanym przez stałe źródło strumienia magnetycznego. Można wyróżnić dwa sposoby indukowania SEM w obwodzie, wykorzystywane do przetwarzania wielkości mechanicznych:
Element obwodu elektrycznego porusza się w polu magnetycznym o indukcji B z prędkością v, zatem powstaje w nim SEM. Taki układ nazywamy przetwornikiem elektrodynamicznym. Wielkością wejściową jest prędkość elementu obwodu elektrycznego.
Obwód elektryczny jest nieruchomy, a przemieszcza się źródło strumienia magnetycznego lub ferromagnetyczna kształtka, zmieniająca konduktancję obwodu magnetycznego. Powoduje to zmiany strumienia Φ sprzężonego z obwodem elektrycznym np. cewką.
Rys.2
Przykład zastosowania tego typu czujnika do pomiaru grubości taśmy metalowej przedstawia poniższy rysunek. Jest to prosty układ mostkowy, dla którego zależności podam poniżej.
Zaprezentowany układ mostkowy indukcyjnościowego przetwornika różnicowego, ma na celu ustalenie pewnych zasad rządzących w tej dziedzinie automatyki. Oto kilka wzorów odpowiedzialnych za taki stan rzeczy.
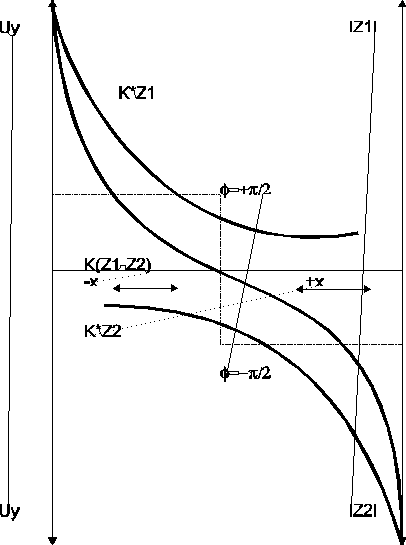
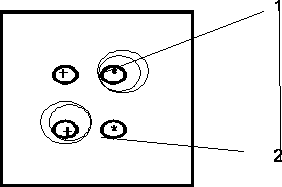
Na rys.3 przedstawiony jest schemat czujnika indukcyjnościowego transformatorowego z otwartym obwodem magnetycznym do pomiaru dużych przemieszczeń.
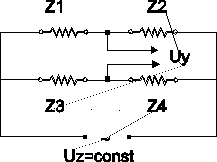
Czujnik ma uzwojenie pierwotne (magnesujące) -1 zasilane stabilizowanym prądem lub napięciem oraz dwa symetrycznie rozmieszczone uzwojenia wtórne 2i3. W przypadku położenia środkowego rdzenia (X=0) obydwa napięcia wtórne U1i U2 są jednakowe. Przy przesuwaniu rdzenia w kierunku dodatnich wartości X, napięci U2 wzrasta a jednocześnie napięcie U1 maleje. Przy przeciwnym kierunku przesuwania (X<0) zmiany napięć są przeciwne (U1 wzrasta, a U2 maleje). Obydwa napięcia wtórne mogą być w układzie pomiarowym wykorzystane osobno, jak jest w układzie mostkowym przedstawionym na rys.4.
Wówczas napięcie wyjściowe U przy położeniu środkowym rdzenia (X=0) jest praktycznie równe zero. Podczas przemieszczania się rdzenia napięcie Uy jest funkcją przemieszczania dodatnich (X>0), a fazę odwróconą o 180 stopni- przy przemieszczeniach ujemnych (X<0).
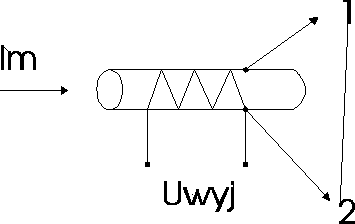
Rys.3
Czujnik indukcyjnościowy transformatorowy z otwartym obwodem magnetycznym. Schemat magneto elastycznych przetworników skrętnych.
Kąt θ odchylenia między Is a H jest proporcjonalny do σ: najkorzystniejszy kąt pomiędzy kierunkiem naprężenia a pola magnetycznego θo=45stopni; wartość λs powinna być duża, natomiast iloczynu IsH- mała. Ten ostatni warunek osiąga się przy największej przenikalności materiału, tj. W zakresie odpowiednio małego natężenia pola magnetycznego.
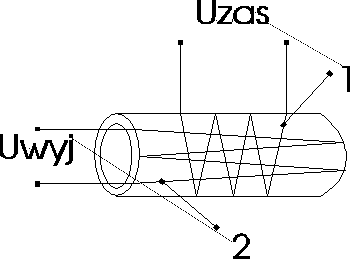
Schematyczny obraz przetwornika prętowego (ukazany w bardzo uproszczony sposób). Czujnik indukcyjnościowy transformatorowy w układzie pomiarowym :
1)-układ zasilający, przetwornica napięcia stałego na napięcie przemienne ;
2)-czujnik pomiarowy ;
3)-różnicowy układ wejściowy;
Rys.4a
Rys.4b
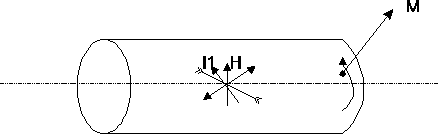
Rysunki 4a, oraz 4b to odpowiednio: przetwornik prętowy i schemat wektorów rozchodzących się w tym przetworniku. Zasadę tą stosuje się do pomiaru momentów skręcających i sił wielkości pochodnych. W stanie bez naprężenia nie ma sprężenia strumienia magnetycznego z uzwojeniem wtórnym. Moment skręcający wywołuje naprężenia ściskające i rozciągające działające pod kątem 45 st. W stosunku do osi rury lub pręta. Powoduje to skręcenie wektora magnetyzacji, sprzężenie składowej osiowej strumienia z cewką 2, w której indukuje się napięcie Uwy=kM gdzie k oznacza stałą, a M.-moment skręcający.
Napięcie wyjściowe dla dwu różnych momentów skręcających w funkcji prądu wzbudzającego przedstawia poniższy rysunek.
Rys.5
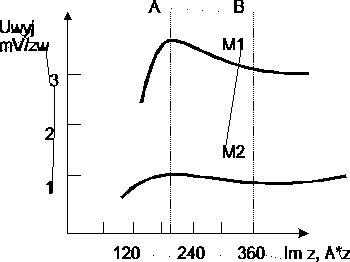
Jako obszar pracy wykorzystuje się łagodne maksimum (odcinek AB), dzięki czemu błąd wywołany zmianami napięcia zasilania jest mały,
Źródłem niedokładności są oprócz zmian napięcia zasilania zmiany częstości, temperatury, histereza magneto elastyczna i tarcie.
Rurowe przetworniki momentu skręcającego wykorzystano również do pomiaru małych i średnich sił w zakresie około 1 kG do 500kG przez umieszczenie ich w odpowiedniej obudowie, przekształcającej siłę F na moment. Zademonstruję to na rysunku, który przedstawia magneto elastyczny przetwornik blokowy do pomiaru dużych sił.
Rys.6
a)
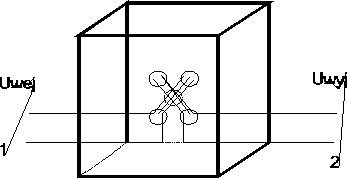
Schemat uzwojeń.
b)
Przebieg linii strumienia magnetycznego w stanie bez naprężenia.
c)
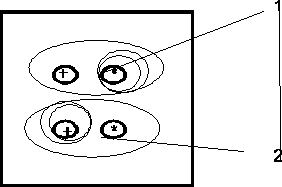
Przebieg linii strumienia magnetycznego w stanie z naprężeniem.
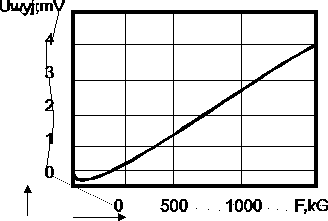
Do pomiaru dużych sił stosuje się bloki składane z blach żelazo krzemowych z dwoma uzwojeniami (zasilającym i wyjściowym) umieszczonymi symetrycznie pod kątem 45 st. w stosunku do kierunku siły. Pod działaniem naprężenia powstaje asymetria magnetyczna, powodująca sprzężenie między obu uzwojeniami, wskutek czego w uzwojeniu wyjściowym indukuje się napięcie proporcjonalne do siły. Rzeczywisty przebieg zależności Uwy=f(F) przedstawiony jest na następnym rysunku. Początkowe zakłócenie liniowej zależności spowodowane są nieuniknionymi asymetriami mechanicznymi i elektrycznymi. Dla uzyskania podzielni zaczynającej się od zera stosuje się nacisk wstępny siłą Fo oraz wprowadza napięcie kompensujące Uo. Układ ten potrzebuje do wprowadzania Ukomp oraz do kompensacji zmian częstotliwości przez obciążenie wyjścia indukcyjnością wraz z filtrem eliminującym wyższe harmoniczne .
Rys.7
Charakterystyka magneto elastycznego przetwornika blokowego.
Układy pomiarowe zawierające przetworniki indukcyjnościowe przeznaczone do pomiarów statycznych można zasilać napięciem przemiennym o częstotliwości sieciowej 50Hz.
Podczas pomiarów dynamicznych za pomocą czujników zminiaturyzowanych (o częstotliwości granicznej 1...10kHz) częstotliwość napięcia zasilającego musi być do dziesięciu razy większa od największej spodziewanej częstotliwości zmian przesunięcia mierzonego.
Rys.8
σ
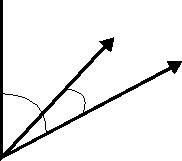
Wykres przedstawia wektory sił w ferromagnetyku.
Naprężenie δ skierowane pod kątem θo, wektor magnetyzacji Is odchyli się o kąt θ od kierunku H. Wymaga to wykonania pewnej pracy Eq kosztem naprężenia oraz pracy Em zewnętrznego pola magnetycznego.
Zależności owe przedstawiają poniższe wzory:
Błędy przetwarzania wynikają ze zmian napięcia i częstotliwości zasilania oraz zmian temperatury otoczenia. W dobrych warunkach klasę niedokładności przetwarzania można utrzymać w granicach od 1,5 do 2%. Zastosowanie metody zerowej, podobnej do tzw. transformatorowej, pozwala na polepszenie klasy do 1, a nawet 0,5.
Ograniczeniem przenoszonej częstotliwości jest przede wszystkim częstotliwość nośna. Przy wysokich częstotliwościach elementy ferromagnety-czne muszą być wykonane z materiału o małej stratności. Również rezonans mechaniczny przetwornika może w niektórych przypadkach stanowić czynnik ograniczający. Wtedy istotne jest zastosowanie dostatecznego tłumienia.
Bibliografia
Do pracy zostały użyte materiały zawarte w książkach:
Mikroelektronika
Encyklopedia automatyki
Sterowanie układami sterowania
Automatyka
Układy elektroniczne analogowe i cyfrowe.
Załączniki
Część rysunków do przetworników A/C i C/A zostaje dołączona oddzielnie, zgodnie z numeracją w pracy.
13
18
CHEŁM 1997
Wyszukiwarka
Podobne podstrony:
przetworniki indukcyjne
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Przetworstwo produktow rolniczych
MLEKO I PRZETWORY MLECZNE (2)
Ceny detaliczne i spożycie warzyw i ich przetworów
W10 Przetw A Cmin
W9 Przetw C A
przetworniki II opracowane
Przetwarzanie mleka koziego
dupont przetworstwo tworzyw4
Przetwornica buck id 406722 Nieznany
Materiały nieżelazne Tworzywa sztuczne Przetwórstwo Auto Expert
przetworka spr ostatnie
dupont przetworstwo tworzyw9
Przetwornica el
Przetwarzanie i utrwalanie żywności (2)
Przetwarzanie produktów pasiecznych
paliwa i przetwarzaie energii 6
więcej podobnych podstron