Podstawą naszych obliczeń była funkcja wyrażona wzorem:
y= (x1-A)2 + (x2+B)2 + C
gdzie:
A= 9
B= 12
C= 89
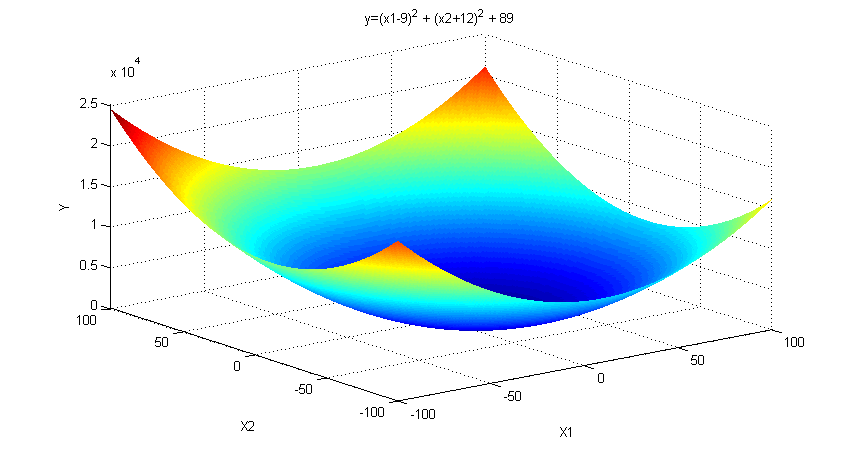
Wykres funkcji
Aby stworzyć wykres funkcji, przyjęliśmy przedziały argumentów:
x1=[-100:100]
x2=[-100:100]
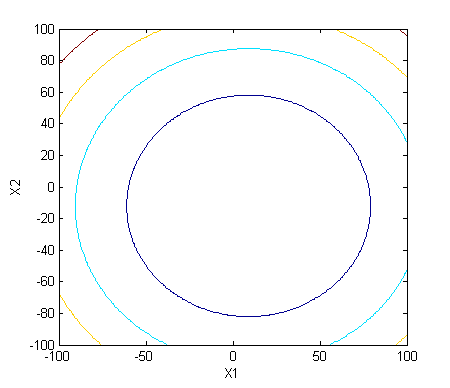
Poniższy fragment kodu spowodował wyświetlenie 2 wykresów:
-trójwymiarowego wykresu wywołanego funkcja surf
-wykresu poziomicowego - funkcja contour
A=9;
B=12;
C=89;
n1=100;
n2=-100;
x1=[-n1:n1];
x2=[-n1:n1];
[X1,X2]=meshgrid(x1,x2);
y=(X1-A).^2+(X2+B).^2+C;
figure(1)
surf(X1,X2,y);
shading flat
grid
figure(2)
contour(X1,X2,y);
Znalezienie minimum funkcji.
Do znalezienia minimum wykorzystaliśmy funkcję fminsearch:
fun = @ (X) (X(1)-A).^2+(X(2)+B).^2+C;
[min, fval] = fminsearch (fun, [-1, 1]);
min
fval
Wykonanie powyższego kodu spowodowało wyświetlenie współrzędnych:
min =
9.0000 -12.0000
oraz wartości minimum funkcji:
fval =
89.0000
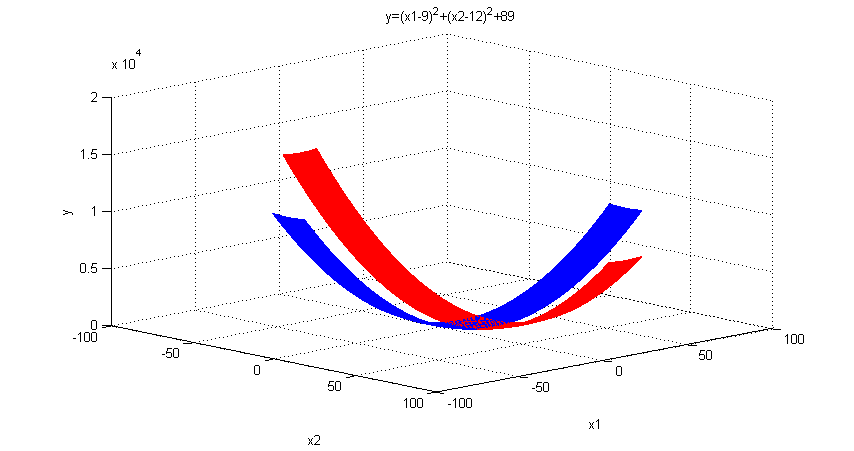
3. Przecięcie wykresu płaszczyznami
Celem tej części zadania było przecięcie wykresu funkcji w punkcie minimum 2 płaszczyznami prostopadłymi do siebie i płaszczyzny x1-x2. Wynikiem takiego działania są 2 przecinające się w punkcie minimum parabole. Przyjęliśmy tolerancję 10%
zb1=[A-10,A+10,n1,n2];
zb2=[n1,n2,B-10,B+10];
figure(3)
hold on
ezsurf('(x-9).^2+(y-12).^2+89',zb1);
ezsurf('(x-9).^2+(y-12).^2+89',zb2);
grid;
hold off
Wyszukiwarka
Podobne podstrony:
sprawko nowe, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce, labki
sprawko powell, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce, labk
moo1 barteksprawko, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce,
2Sprawozdanie z MOO, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce,
2analityczne, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce, labki
sprawozdanie-MaciejPawnukTomaszImiołek, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Opty
sprawko-6, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Laborki, lab6, got
sciaga kolos, Automatyka i Robotyka, Semestr III, Metody numeryczne
SPRAWKO 4 EiE nasze, Automatyka i Robotyka, Semestr III, Elektrotechnika i Elektromechanika, Gotowce
Mechanika - opracowanie, Automatyka i Robotyka, Semestr III, Mechanika, Gotowce, Mechanika, Mechanik
BD Lesiu, Automatyka i Robotyka, Semestr III, Bazy Danych, Gotowce
metody numeryczne wartosc funkcji, Automatyka i Robotyka, Semestr IV, Metody Numeryczne, Lab, lab2
Sprawko liniow, Automatyka i Robotyka, Semestr 5, EiN, sprawka
GR D, Automatyka i Robotyka, Semestr III, Bazy danych
sciaga a, Automatyka i Robotyka, Semestr III, Bazy danych
DAPTA spraweczko, Automatyka i Robotyka, Semestr III, Elektrotechnika i Elektromechanika, Gotowce, E
więcej podobnych podstron