IV.1.Siły przekrojowe w prętowych ustrojach statycznie wyznaczalnych.
Definicje:
Pręt - bryła, której jeden wymiar (długość) jest nieporównywalnie duży w stosunku do pozostałych.
Oś pręta - miejsce geometryczne punktów, będących środkami ciężkości przekrojów pręta dowolnymi płaszczyznami przecinającymi jego tworzące
Przekrój poprzeczny pręta - przekrój płaszczyzną prostopadłą do osi pręta
Układ statycznie wyznaczalny - układ, dla którego można jednoznacznie wyznaczyć reakcje na podstawie równań równowagi sił =>
liczba reakcji równa jest liczbie niezależnych równań równowagi
liczba stopni swobody zapewniających geometryczną niezmienność układu równa się 0
Układ statycznie niewyznaczalny - układ, dla którego z równań równowagi otrzymuje się nieskończenie wiele rozwiązań na siły reakcji =>
liczba reakcji jest większa od liczby niezależnych równań równowagi
liczba stopni swobody zapewniających geometryczną niezmienność układu równa się 0
Układ chwiejny - układ, dla którego równania równowagi stanowią sprzeczny układ algebraicznych równań
liczba reakcji jest mniejsza od liczby niezależnych równań równowagi
liczba stopni swobody jest większa od 0
Siły przekrojowe
Założenia:
Założenie o continuum materialnym - każdy punkt geometryczny ciała ma przypisaną masę, która jest w sposób ciągły rozłożona w objętości konstrukcji.
Założenie o równowadze statycznej - zdolność powracania ustroju do położenia równowagi, z którego został wyprowadzony przez działanie dowolnej przyczyny.
Zasada zesztywnienia - wpływ przemieszczeń na obliczanie reakcji i sił wewnętrznych jest pomijalnie mały.
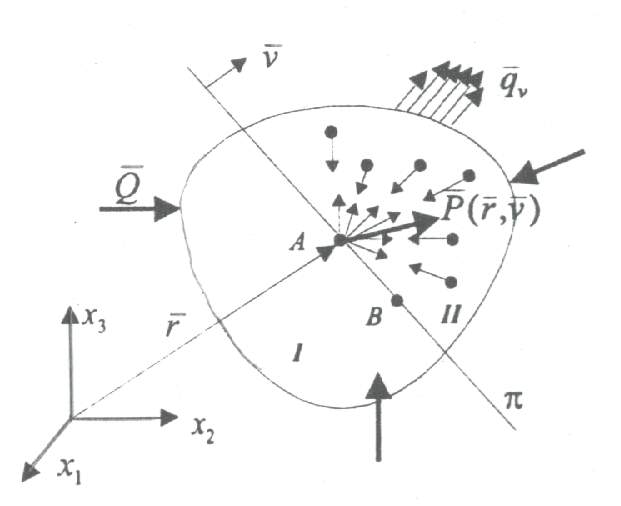
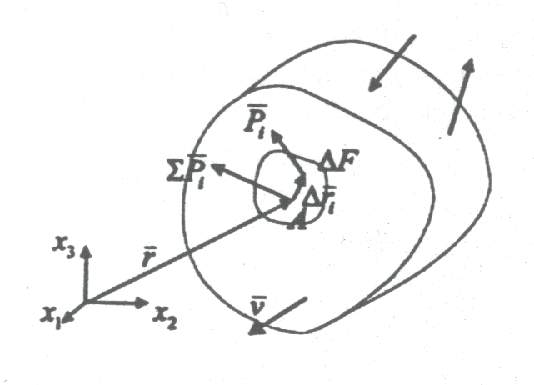
Weźmy pod uwagę bryłę sztywną pozostającą w równowadze statecznej, poddaną oddziaływaniu pewnego układu sił zewnętrznych
Wewnątrz wybieramy dowolny punkt A i prowadzimy przez niego płaszczyznę π o wersorze normalnym ν, która dzieli naszą bryłę na dwie części I i II. Przyjmujemy, że punkt A należy do I. Na punkt A działa pęk wektorów sił z jakimi wszystkie punkty materialne części II oddziałują na niego. Tworzą one zbieżny układ sił, którego suma stanowi wypadkową tego układu zaczepioną w punkcie A - to jest właśnie owa siła wewnętrzna. Siła ta jest funkcją :
Położenia punktu - bo gdy inny punkt to inne siły
Wektora normalnego płaszczyzny podziału
Siła wewnętrzna - funkcja wektorowa określająca wypadkową sił międzycząsteczkowych.
I tu pada pytanie jak ją wyznaczyć ? Skorzystamy z następujących twierdzeń:
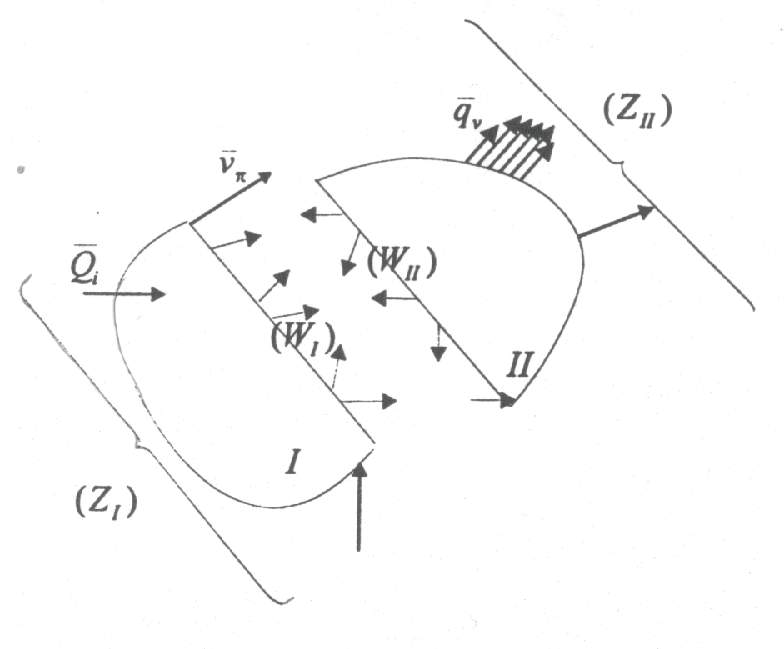
Twierdzenie 1 ( o układach sił wewnętrznych i zewnętrznych ):
Układ sił wewnętrznych przyłożonych do części I jest równoważny układowi sił zewnętrznych przyłożonych do części II
![]()
![]()
Twierdzenie 2 ( o układach równoważnych ):
Jeżeli dwa układy są równoważne to :
Sumy obu układów są sobie równe
Momenty liczone względem tego samego punktu są równe
![]()
⇒ 
jest to układ zredukowany w punkcie Q
Stąd otrzymujemy siły wewnętrzne w konstrukcjach prętowych
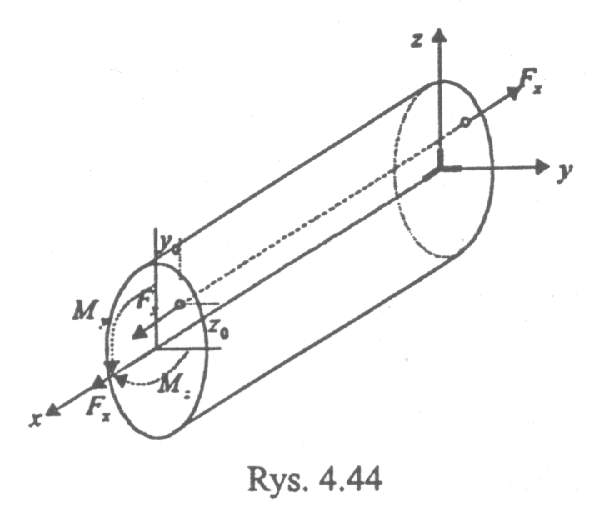
W konstrukcjach prętowych układ zredukowany sił wewnętrznych odnosić się będzie do przekroju poprzecznego pręta, ze środkiem redukcji w środku ciężkości przekroju poprzecznego.
Układ zewnętrzny może zredukować się w szczególnych przypadkach do :
Wypadkowej prostopadłej do przekroju poprzecznego pręta - siła podłużna ( osiowa, normalna ) N
Wypadkowej leżącej w płaszczyźnie przekroju poprzecznego - siła poprzeczna ( tnąca, ścinająca ) Q
Pary sił leżących w płaszczyźnie przekroju - moment skręcający
Pary sił w płaszczyźnie prostopadłej do płaszczyzny przekroju - moment zginający
Przypomnieć sobie jeszcze należałoby jakie znamy układy prętowe płaskie i przestrzenne. Metody rozwiązywania danego układu, twierdzenia dotyczące danych układów ( np. kratownic )
IV.2. Charakterystyki mechaniczne materiałów i ich doświadczalne wyznaczanie
Wytrzymałość mechaniczna - wytrzymałość mechaniczna jest to opór stawiany, przez materiał zniszczeniu jego struktury działaniem obciążenia (sił zewnętrznych). Ocenia się ją przez tzw. wytrzymałość doraźną lub długotrwałą (obciążenie działa na materiał dłuższy czas).
Rozróżnia się wytrzymałość na ściskanie, zginanie, ścinanie i inne.
Wytrzymałość na ściskanie
Badania przeprowadza się na próbkach przeważnie o kształcie sześcianów lub prostopadłościanów, ewentualnie walcowe, przy czym dla różnych materiałów wymiary są różne. Dla kamieni np. wymiar próbek wynosi 5,0 x 5,0 x 5,0 cm, dla drewna 2x2 cm itd.
Wytrzymałość na ściskanie określa się ze wzoru: ![]()
, kG/cm2 (N/m2)
gdzie: P - siła zgniatająca próbkę, kG( N ),
F - powierzchnia próbki, cm2 (m2 ).
Wytrzymałość na rozciąganie
Badania przeprowadza się na próbkach o kształtach zgodnych z zaleceniami w normach. Materiały kruche: kamień, beton mają małą wytrzymałość na rozciąganie, natomiast stal i drewno - dużą. Wytrzymałość na rozciąganie określa się ze wzoru: ![]()
, kG/cm2 (N/m2)
gdzie: P - siła rozrywająca próbkę, kG(N),
F - powierzchnia próbki, cm2(m2 )
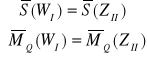
Doświadczalnie przeprowadza się na próbkach, które mają kształt pokazany na rys. nr l. Za długość pomiarową (bazę) uznajemy L0 (przekroje poprzeczne na końcach tej bazy możemy uznać za obciążone równomiernie). Wartości odczytane z maszyny wytrzymałościowej, dają obraz funkcji σ =f(ε). Charakterystyczne granice (wykres stali miękkiej ) przedstawia rys. nr 2.
rys. nr 1. rys. nr 2.
granica proporcjonalności RH - jest to przedział, w którym przyrostom odkształcenia odpowiadają proporcjonalne przyrosty naprężeń, (moduł Younga jest współczynnikiem kierunkowym prostej ).
granica sprężystości Rs - największe naprężenie, do którego materiał zachowuje się w sposób sprężysty. Inaczej, takie naprężenie w którym odkształcenie trwałe osiągnie wartość εtrw = 0.05% (R0.05).np. pręt o długości 1m wydłuży się o 0.5mm
Dla wielu materiałów powyższe granice RH ,Rs leżą bardzo blisko siebie i w praktyce ich nie rozróżniamy.
granica plastyczności Re - naprężenie, przy którym następuje przyrost odkształceń bez wzrostu siły, inaczej naprężenie przy którym odkształcenie trwałe wynosi εtrw =0,2% (R0.2),wydłużenie pręta metrowej długości o 2mm. (dla stali miękkiej granicy plastyczności towarzyszy tzw. zjawisko płynięcia materiału - niezauważalnemu wzrostowi naprężeń towarzyszą znaczne odkształcenia:10 do 15 razy większe niż odkształcenia przy granicy sprężystości. Dzieje się tak tylko do osiągnięcia pewnej wartości odkształcenia, od której następuje samowzmocnienie materiału. Do tego momentu materiał zachowuje się jak idealnie plastyczny, dalej próbka zaczyna się niebezpiecznie przewężać - powstaje tzw. szyjka.
granica wytrzymałości Rm - naprężenie, przy którym następuje zerwanie próbki, wartość naprężenia przy której rozpoczyna się przedział niebezpiecznego przewężania.
gdzie:
odcinek OA granica proporcjonalności - RH ; granica sprężystości -Rs ; odcinek BC - granica plastyczności -Re;
odcinek CD - samowzmocnienie materiału ; poniżej pkt. D - granica wytrzymałości - Rm
Wytrzymałość na zginanie
Badania przeprowadza się na beleczkach znormalizowanych wg zaleceń normy. Wytrzymałość na zginanie oblicza się z wzoru:
Rg = M/W kG/cm2 (N/m2)
gdzie: M - moment zginający, kGcm (Nm),
W - wskaźnik wytrzymałości, cm3 (m3).
U większości materiałów budowlanych, jak kamień, beton itp., pierwsze rysy pokazują się w dolnych partiach beleczek gdyż materiały te mają wielokrotnie mniejszą wytrzymałość na rozciąganie niż na ściskanie.
Sprężystość
Sprężystość jest to zdolność ciała do przyjmowania pierwotnej postaci o tych samych wymiarach po usunięciu obciążenia pomimo, że pod obciążeniem zmieniało ono swój kształt. Sprężyste właściwości danego materiału charakteryzuje się tzw. współczynnikami (modułem) sprężystości E w kG/cm2 (N/m2) ; `
Plastyczność
Plastyczność jest to zdolność materiału do zachowania odkształceń, tj. do zachowania trwałych zmian w jego postaci pomimo usunięcia sił, które odkształcenia te spowodowały.
Pełzanie
Pełzanie jest to zjawisko wywierające znaczny wpływ na wytrzymałość materiału, charakteryzujące się nieprzerwanym wzrostem odkształceń plastycznych przy niezmiennym obciążeniu. Wielkość pełzania zależy od struktury, wieku materiału i od czasu działania obciążenia.
Relaksacja
Relaksacja jest to zjawisko związane z pełzaniem, charakteryzuje się spadkiem wewnętrznych naprężeń przy stałym (niezmiennym) odkształceniu.
Ciągliwość
Ciągliwość charakteryzuje się tym, że materiały nie wykazują zniszczenia przy znacznym odkształceniu plastycznym.
Kruchość
Kruchość jest przeciwieństwem ciągliwości i charakteryzuje się tym, że materiał ulega nagłemu zniszczeniu bez wyraźnych odkształceń poprzedzających zwykle zniszczenie materiału. Określa się ją stosunkiem wytrzymałości na rozrywanie do wytrzymałości na ściskanie. W przypadku gdy stosunek ten jest mniejszy od 1/8, to materiały zaliczamy do kruchych.
Twardość
Twardość jest cechą charakteryzującą odporność badanego materiału na odkształcenie trwałe przy wciskaniu w niego ciała bardziej twardego. Im twardość jest większa, tym materiał jest trudniejszy w obróbce i tym odporniejszy na zarysowanie się, na zużycie od chodzenia itp. Na przykład twardość drewna oznacza się metodą Janki lub Brinella, kamienia wg skali Mohsa.
Ścieralność
Odporność na ścieranie bada się na tarczy Bohmego, a wyraża się, np. dla kamieni badanych na tej tarczy, stratą wysokości badanej próbki poddanej ścieraniu. Badania ścieralności przeprowadza się na sześcianach. Stratę wysokości s określa się jako ubytek ciężaru Gu próbki podzielonej przez jej przekrój F (cm2 ) i ciężar objętościowy γ0.
s = Gu/Fγ0 cm(m )
Odporność na uderzenie
Odporność na uderzenie, tj. zdolność wytrzymywania nagłych uderzeń dynamicznych, jest specjalnie ważna dla: posadzek na które mogą np. spadać ciężary, płyt chodnikowych, cienkich ścian (szczególnie zewnętrznych), okładzin itp. Miarą odporności na uderzenie jest praca potrzebna do stłuczenia płytki lub przełamania innych elementów. Badania wykonuje się na tzw. Przyrządzie Martensa i innych podanych w normach.
Wytrzymałością charakterystyczną - Ri nazywamy granice wyznaczone na podstawie badań dośw. (Rs, Re, Rm ).
Wytrzymałością obliczeniowa - R - nazywamy wytrzymałość, którą bierzemy od obliczeń projektowych i która uwzględnia czynniki przypadkowe tj. niedokładne dane o wymiarach geom. konstrukcji, niedokładnie przewidziane rzeczywiste obciążenia itp. Wytrzymałości obliczeniowe otrzymywane są z podzielenia wytrzymałości charakterystycznej przez współczynnik γ m >1, gdzie γ m współczynnik materiałowy.
IV.3. Analiza stanów naprężenia i odkształcenia w punkcie.
- Wstęp - co to jest naprężenie
Każdemu punktowi leżącemu na płaszczyźnie przekroju bryły przyporządkowana jest siła wewnętrzna. Naprężeniem nazywamy gęstość sił wewnętrznych.
Co to znaczy - weźmy :
dowolny przekrój bryły płaszczyzną o normalnej

, przechodzącej przez punkt A, o wektorze wodzącym
wokół punktu A element powierzchni ΔF

- suma sił wewnętrznych przyporządkowanych punktom powierzchni ΔF

- średnia gęstość sił wewnętrznych
naprężenie w punkcie A : ![]()
- Naprężenie jest funkcją dwóch wektorów ![]()
i ![]()
, ![]()
Stanem naprężenia w ustalonym punkcie ![]()
nazywamy zbiór wektorów naprężeń przyporządkowanych wszystkim płaszczyznom podziału bryły, przechodzącym przez dany punkt o wektorze wodzącym ![]()
- stanem naprężenia w punkcie nazywamy funkcję wektorową ![]()
Do określenia stanu naprężeń wystarcza znajomość macierzy naprężeń w punkcie i współrzędnych wersora
![]()
, bowiem
![]()
Macierz naprężeń - zbiór skalarnych funkcji trzech zmiennych ![]()
, które przedstawiają współrzędne naprężeń w punkcie o współrzędnych ![]()
, uporządkowanych w ten sposób, że wiersze są współrzędnymi naprężeń przyporządkowanych płaszczyznom przekrojów prostopadłych odpowiednio do osi ![]()
.



Elementy leżące na diagonalnej - naprężenia normalne ![]()
, - pozostałe naprężenia styczne ![]()
- macierz naprężeń jest uporządkowanym zbiorem liczb jeśli ustalimy współrzędne punktu
Transformacja macierzy naprężeń do innego układu
Jeśli przetniemy bryłę trzema innymi płaszczyznami, wówczas każdej z tych nowych płaszczyzn będą
przyporządkowane wektory naprężenia. Ponieważ macierz ![]()
jest tensorem - jej elementy ![]()
transformują się do nowego układu według prawa tensorowego :
![]()
(![]()
- jest j -tą współrzędną i-tego wersora osi ![]()
w układzie starym ![]()
)
• Ekstremalne naprężenia normalne
Mając macierz naprężeń ![]()
możemy obliczyć wektor naprężenia ![]()
przecinając bryłę płaszczyzną przechodzącą przez dany punkt i o normalnej ![]()
: ![]()
, problem polega na znalezieniu płaszczyzny lub - co na jedno wychodzi - taki wektor ![]()
do niej normalny, aby naprężenie ![]()
było do tego wektora równoległe. Problem ten nazywany jest w rachunku tensorowym szukaniem wektorów własnych i wartości własnych.
![]()
![]()
⇒ ![]()
, ![]()
, dalej otrzymujemy równanie zwane charakterystycznym, wiekowym lub sekularnym: ![]()
gdzie:
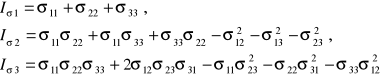
otrzymujemy pierwiastki : ![]()
. Mogą zaistnieć trzy przypadki

,wektory własne są wzajemnie prostopadłe
Macierz naprężeń w nowym układzie (układzie zbudowanego na wektorach własnych) :
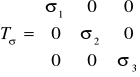
![]()
- ekstremalne naprężenia normalne lub naprężenia główne

(lub
,
) Wartości własnej
odpowiada wektor własny
, natomiast wartości własnej
odpowiada cała płaszczyzna wektorów własnych prostopadła do
. Przy przecięciu bryły każdą płaszczyzną równoległą do
otrzymujemy wektor naprężenia prostopadły do tej płaszczyzny, którego miara wynosi

, każdy wektor jest wektorem własnym, a zatem przy przecięciu bryły każdą płaszczyzną otrzymujemy wektor naprężenia prostopadły do przekroju, którego miara wynosi
.
• Ekstremalne naprężenia styczne ![]()
występują przy przekroju bryły płaszczyznami przechodzącymi przez jedną z osi
głównych i nachylonymi pod kątem 45° do pozostałych.
Wartości maksymalnych naprężeń stycznych :
![]()
, ![]()
,
![]()
• Nierówności i koła Mohra - metoda graficzna
Rozpatrujemy przypadek ![]()
, pierwiastki ![]()
(macierz naprężeń w osiach głównych układu) znajdziemy:
zbiór rozwiązań (

) dla dowolnych płaszczyzn przekroju bryły
mając

i wersor normalny do płaszczyzny - długość
• Równania równowagi Naviera
Elementy macierzy naprężeń muszą w każdym punkcie wewnętrznym bryły spełniać równania równowagi (równania Naviera) :

, i,j = 1, 2, 3
![]()
- macierz naprężeń wewnątrz bryły o trzech zmiennych niezależnych ![]()
- wektor sił masowych
• Statyczne warunki brzegowe
Zgodnie z twierdzeniem o równoważności układów sił zewnętrznych i wewnętrznych, układ sił działających na ciało jest równoważny układowi zerowemu, stąd na powierzchni ciała statycznie obciążonego muszą być spełnione statyczne warunki brzegowe :
![]()
i,j= l, 2, 3
![]()
- macierz naprężeń na powierzchni bryły o dwóch zmiennych niezależnych , ![]()
- współrzędne wersora normalnego
do powierzchni przekroju
• Przemieszczenia
Z ciała określonego w układzie (![]()
), wybierzmy punkt A o wektorze wodzącym ![]()
, po przyłożeniu obciążenia punkt
ten przemieści się w nowe położenie A' o wektorze wodzącym ![]()
. Wektor ![]()
nazywamy wektorem
przemieszczenia. Funkcja wektorowa u = u (r) określa pole wektorowe przemieszczeń. Współrzędne tej funkcji, będące
funkcjami skalarnymi r lub (![]()
) oznaczamy przez ![]()
i nazywamy przemieszczeniami.
• Odkształceniem liniowym włókna nazywamy względną zmianę jego długości na skutek przyłożonych sił
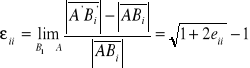
gdzie: ![]()
• Odkształceniem kątowym nazywamy połowę kąta o jaki zmieni się kąt prosty po odkształceniu między dwoma włóknami
przechodzącymi przez wspólny punkt i wzajemnie prostopadłymi przed przyłożeniem obciążenia.

gdzie: 
Gdy i,j = 1, 2, 3 mamy 6 nieliniowych równań geometrycznych
• Z założenia o małych pochodnych przemieszczeń wynikają równania geometryczne, liniowe Cauchy'ego
![]()
![]()
![]()
Przemieszczenia muszą spełniać kinematyczne warunki brzegowe - są to warunki jakie narzucają więzy na przemieszczenia.
• Odkształcenia liniowe i kątowe stanowią zbiór funkcji, które przedstawiamy w postaci macierzy odkształceń
na przekątnej odkształcenia liniowe, poza nią odkształcenia kątowe 
• Analiza stanu odkształceń w punkcie
Macierz odkształceń jest symetryczna i jest tensorem przy założeniu małych pochodnych przemieszczeń. To pozwala
dokonać analizy stanu odkształceń w punkcie, tzn.
znaleźć odkształcenie włókna
,znaleźć ekstremalne odkształcenie włókna - jest to zagadnienie poszukiwania wartości i wektorów własnych. Macierz odkształceń w układzie osi własnych :
elementy tensora muszą spełniać warunki nierozdzielności:
dla: i, j, k, r =1, 2, 3
których jest ![]()
, i z których 6 jest niezależnych
• związki pomiędzy ![]()
i ![]()
to równania fizyczne
• równania Hooke'a podają związki pomiędzy naprężeniami, a odkształceniami w dowolnym układzie współrzędnych
![]()
i, j = 1, 2, 3
G,λ - współczynniki Lamego
IV.4. Wymiarowanie przekrojów prętów przy obciążeniach prostych i złożonych
Zasada superpozycji
Jeśli do danej bryły o ustalonych więzach przyłożono, w dowolnej kolejności, układy sił zewnętrznych ![]()
; k =1,2...n i dla każdego układu znane jest rozwiązanie zagadnienia brzegowego liniowej teorii sprężystości : ![]()
,to pola tensorowe naprężeń i odkształceń oraz pole wektorowe przemieszczeń określają relacje:
![]()
; ![]()
; ![]()
Zasada de Saint Venanta
Jeżeli do bryły przyłożone jest na małej powierzchni ΔS << S obciążenie wywołujące pewien stan naprężenia, odkształcenia i przemieszczenia i jeśli na tej powierzchni ΔS obciążenie zastąpimy innym, ale statycznie równoważnym, to wartości naprężeń, odkształceń i przemieszczeń wywołanych drugim obciążeniem, w dostatecznej odległości od miejsca przyłożenia sił, będą się różnić dowolnie mało od wartości odpowiednich wielkości wywołanych obciążeniem pierwszym.
Stan graniczny - stan, w którym konstrukcja lub jej część przestaje spełniać swoje funkcje lub gdy nie odpowiada założonym warunkom użytkowania.
Stan graniczny nośności - utrata stateczności, zniszczenie najbardziej wytężonych przekrojów
Stan graniczny użytkowania obejmuje : ugięcia, zarysowanie, drgania
Rodzaje obciążeń :
Czyste i proste rozciąganie i ściskanie:
Czyste rozciąganie - pręt obciążony tylko na ściankach poprzecznych siłami o równomiernie rozłożonej gęstości ( q=const )
Macierz naprężeń Macierz odkształceń
Proste rozciąganie - rozwiązanie czystego rozciągania redukujemy do środka ścianki poprzecznej (N=qA => q=N/A )
N -siła , A- powierzchnia ścianki poprzecznej
Warunki projektowania: -stan graniczny zniszczenia ![]()
; - stan graniczny użytkowania ![]()
Czyste zginanie
Przy prostym zginaniu : 
Warunki projektowania: -stan graniczny zniszczenia : 
; wskaźnik wytrzymałości 
; wytrzymałość na :![]()
- rozciąganie, ![]()
-ściskanie
- stan graniczny użytkowania : 
,![]()
- max. ugięcie (strzałka ugięcia )
Zginanie ukośne
Mimośrodowe rozciąganie i ściskanie
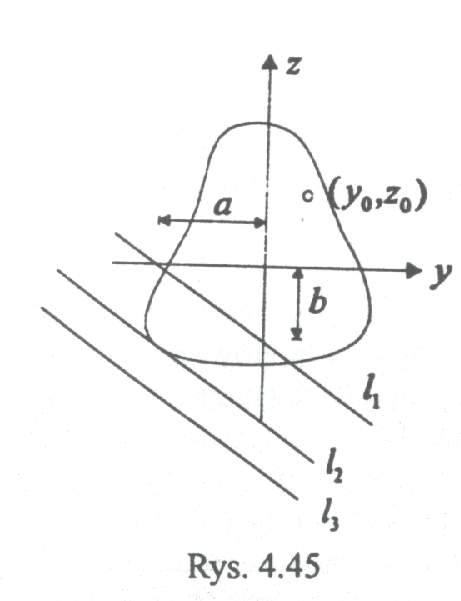
Oś obojętna - krawędź przecięcia płaszczyzny naprężeń z płaszczyzną przekroju poprzecznego. Równanie osi obojętnej σx =0
Może zajmować trzy położenia:
Przechodzi przez przekrój poprzeczny - prosta l1 - dzieli pole przekroju poprzecznego na dwie części, w których naprężenia σx mają przeciwne znaki (σx dodatnie czyli rozciąganie nad osią, część poniżej osi jest ściskana ( - ).
Jest styczna do konturu przekroju poprzecznego - prosta l2 naprężenia we wszystkich punktach przekroju
Przechodzi poza przekrojem poprzecznym - prosta l3 poprzecznego są tego samego znaku (+)rozciąganie
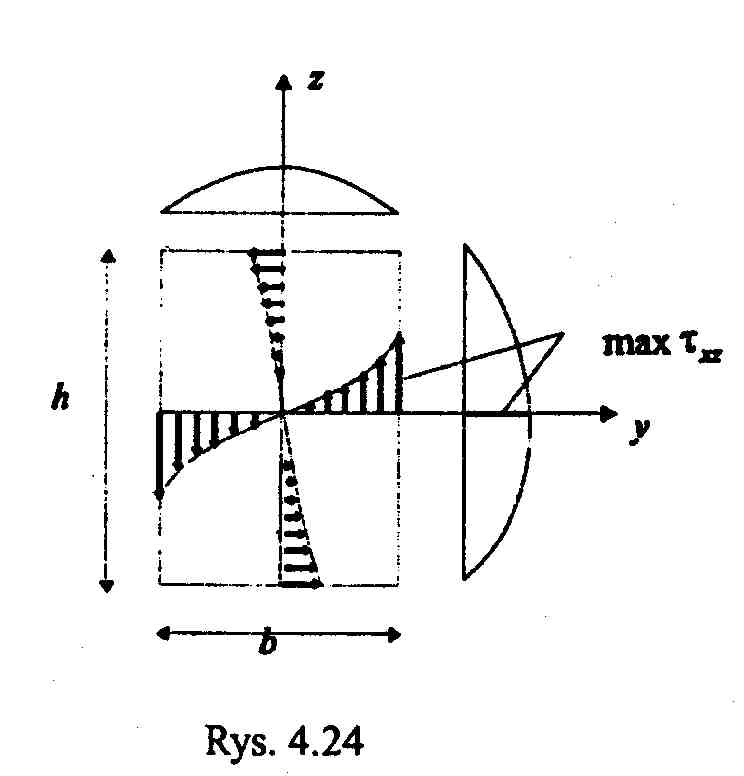
Zginanie poprzeczne - pręt pryzmatyczny, prosty, o przekroju poprzecznym symetrycznym wzgl. osi z , obciążenie przyłożone symetrycznie wzgl. płaszczyzny xz na pobocznicy i ściankach poprzecznych
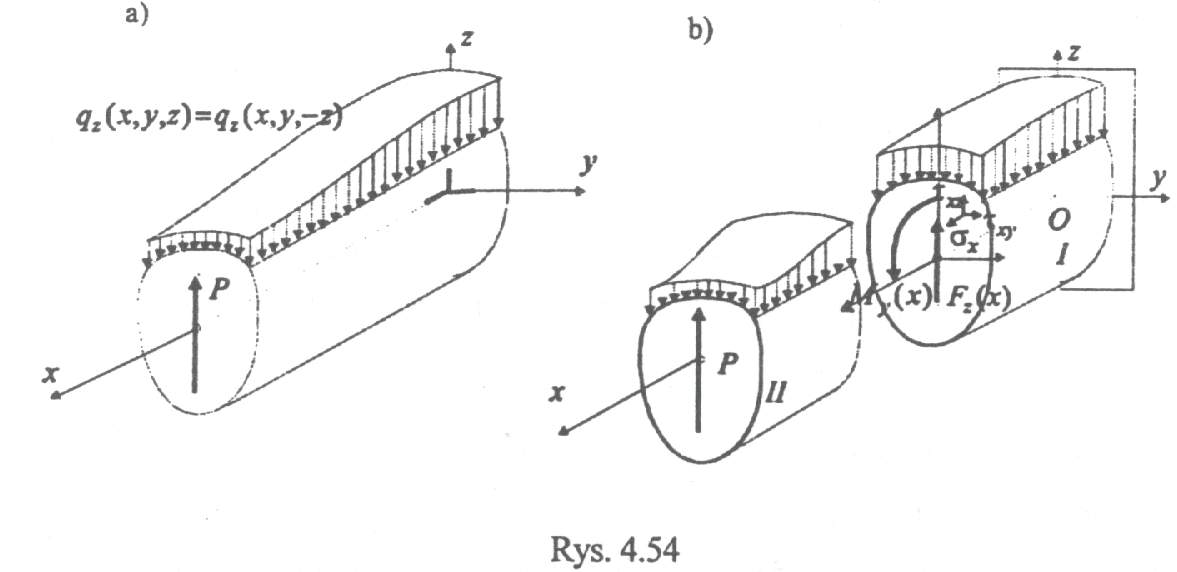
ugięcie belki zginanej poprzecznie
; krzywizna ugiętej belki: 
-wyrażenie ![]()
jest pomijalnie małą wielkością w stosunku do jedności (założenia o małych przemieszczeniach i małych pochodnych przemieszczeń )
( * ) 
-przemieszczenia punktów na osi belki
metoda analityczna (Clebscha ) - rozwiązanie równania różniczkowego ( * ) + kinematyczne warunki brzegowe
metoda graficzno-analityczna (Mohra) - wykorzystanie dwóch równań różniczkowych :
![]()
; 
;
kolejno fikcyjne: obciążenie, moment, siła poprzeczna ![]()
; ![]()
; ![]()
tok postępowania: wyznaczenie funkcji momentów dla danej belki, określenie belki fikcyjnej, obciążenie belki fikcyjnej obciążeniem fikcyjnym ![]()
, znalezienie równania momentów i sił poprzecznych dla belki fikcyjnej od obciążenia fikcyjnego, które wprost przedstawia funkcje ugięcia i kąta ugięcia.
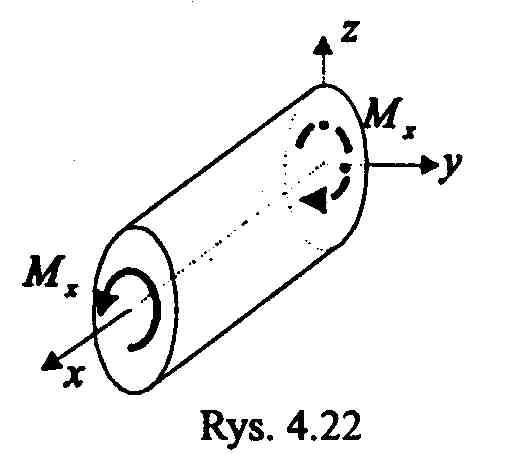
czyste i proste skręcanie
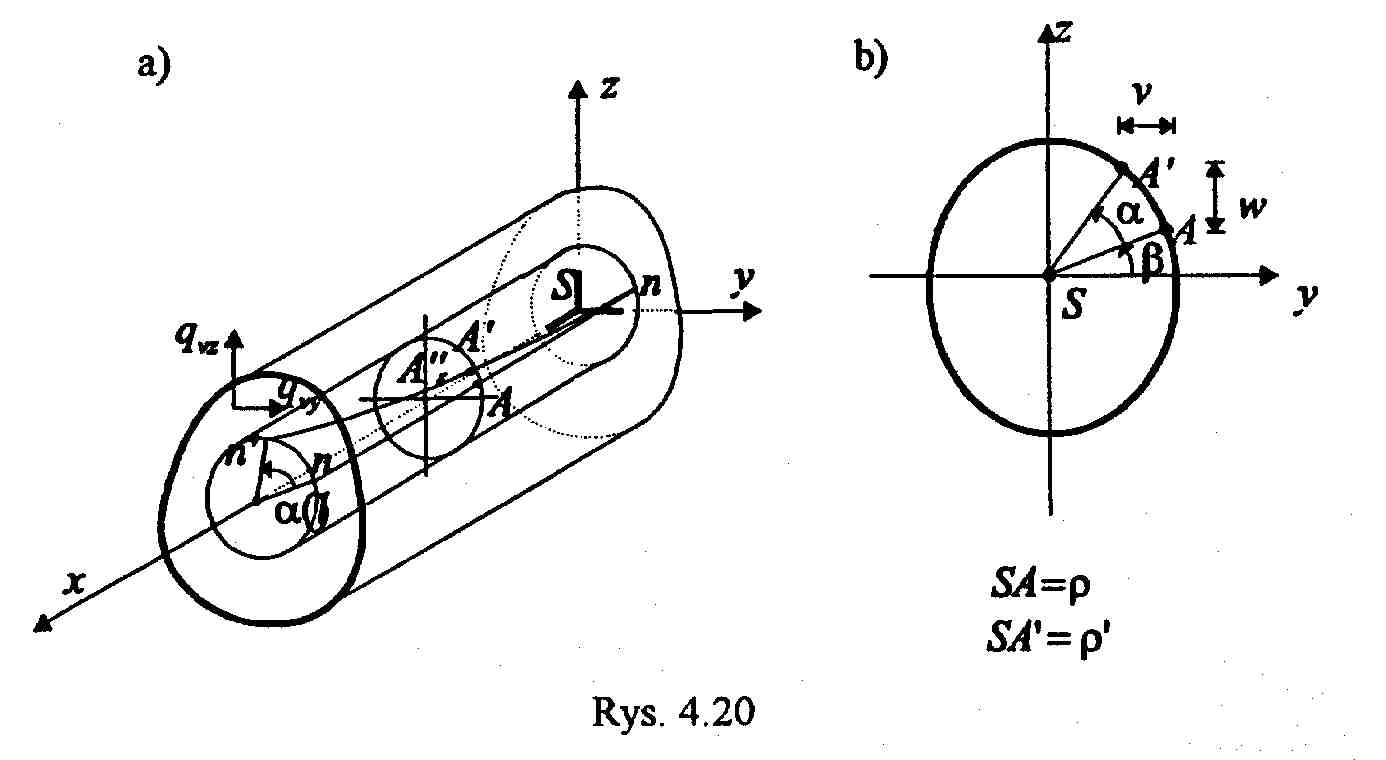
czyste skręcanie - pręt prosty, pryzmatyczny, o dowolnym przekroju poprzecznym, obciążony siłami o gęstości

,przyłożonymi na ściankach poprzecznych.
Z pręta wycinamy walec, którego tworzące, po przyłożeniu obciążenia stają się liniami krzywymi,( na rys. linia n-n, krzywa n-n' ), w dowolnym przekroju poprzecznym, punkt A przemieści się do p.A”, który wychodzi poza płaszczyznę przekroju, p.A' oznacza rzut p.A'' na naszą płaszczyznę przekroju poprzecznego.
![]()
-kąt skręcania : ![]()
, ![]()
-jednostkowy kąt skręcania
funkcje przemieszczeń : ![]()
, ![]()
, ![]()
pole odkształceń: z równań Cauchy'ego 
otrzymujemy ![]()
, ![]()
, ![]()
,
, ![]()
, ![]()
pole naprężeń: z równań Hooke'a ![]()
mamy ![]()
, ![]()
, ![]()
,
, ![]()
, ![]()
zagadnienie brzegowe - spełnienie równań Naviera i statycznych warunków brzegowych zależy od odpowiedniego doboru
funkcji ![]()

, ![]()
, i,j =1,2,3 czyli 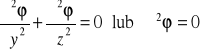
zagadnienie Neumanna
proste skręcanie -obciążenie momentami skupionymi równoważnymi z obciążeniem jak przy czystym skręcaniu
![]()
podstawiając jednostkowy kąt skręcania ![]()
do czystego skręcania otrzymujemy rozwiązanie przemieszczeń, odkształceń i naprężeń
skręcanie pręta o przekroju kołowym
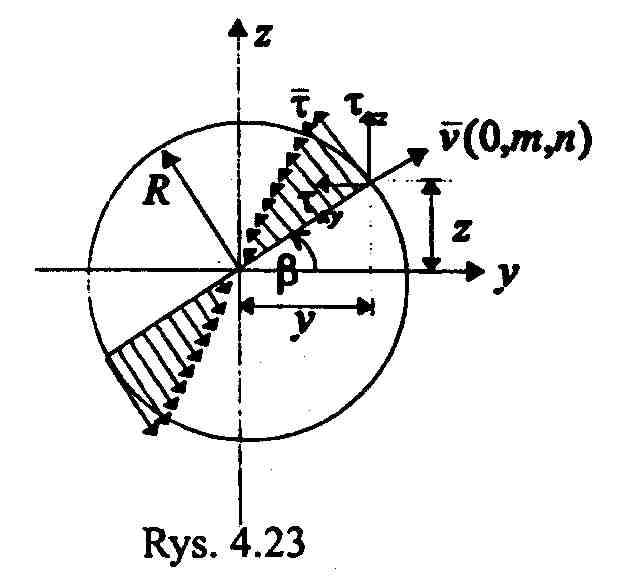
![]()
- biegunowy moment bezwładności
przemieszczenia : ![]()
, ![]()
, ![]()
odkształcenia : ![]()
, ![]()
, ![]()
, ![]()
naprężenia : ![]()
, ![]()
, ![]()
, ![]()
![]()
warunek projektowania : -stan graniczny zniszczenia ![]()
(![]()
wskaźnik wytrzymałości przy skręcaniu) ; -stan graniczny użytkowania - nieprzekroczenie dopuszczalnego kąta skręcania ![]()
: ![]()
skręcanie pręta o przekroju prostokątnym
![]()
( ![]()
wskaźnik wytrzymałości przy skręcaniu pręta prostokątnego )
warunek projektowania : -stan graniczny zniszczenia ![]()
Hipotezy wytężeniowe -o wytężeniu materiału decyduje:
Rk = ( RH , Rs , Re , Rm )
Galileusz - maksymalna, bezwzględna wartość naprężenia głównego
![]()
Coulomb-Tresca-Guest - maksymalna, bezwzględna wartość największego naprężenia stycznego
![]()
np. betonowa próbka w kształcie walca poddana ściskaniu(ekstremalne naprężenia styczne leżą w płaszczyznach przekroju, które przechodzą przez jedną z osi głównych, a do pozostałych nachylone są pod kątem 45° - tworzą się dwa charakterystyczne stożki),zniszczenie następuje na pobocznicy tych stożków.
Huber-Mises-Hencky - ilość nagromadzonej w nim energii odkształcenia postaciowego
![]()
Niezależnie czy wartość ta powstała w wyniku prostego czy złożonego obciążenia
Wytrzymałość
11
L0
Rs
z q=const. z
N N
x
x
q=const. czyste rozciąganie proste rozciąganie
z z
M zg
x y
zd
czyste zginanie zginanie proste
z
Mz
My y
Wyszukiwarka
Podobne podstrony:
tensometry1, ZiIP, II Rok ZIP, wytrzymalosc, WYDYMA ROK II semestr III-IV
bel zesp, AGH, Semestr IV, Różne, Wytrzymalosc
Laboratorium Wytrzymalosci Materialow-cw7, ZiIP, II Rok ZIP, wytrzymalosc, WYDYMA ROK II semestr III
charakterystyka sprężyn(1), Studia Politechnika Poznańska, Semestr IV, Wytrzymałość Materiałów, Labo
Clebsch, STUDIA, SEMESTR IV, Wytrzymałość materiałów, wytrzymalosc materialow
WarZal IV IM(1), szkoła, mechanika-wytrzymka
szczegółowa próba rozciagania, AM Gdynia, Sem. III,IV, Wytrzymałość materiałów - laborki
Wytrzymałość materiałów egzamin reka, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, S
Wytrzymałość materiałów egzamin, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, SEMEST
Martyna - WYTRZYMAŁOŚĆ MAT. - SPRAWKOcw 2, Prywatne, Budownictwo, Materiały, IV semestr, od Beaty, S
Zasady statyki wizy i ich reakcje-cigag, inżynieria ochrony środowiska kalisz, a pwsz kalisz ioś, IV
Laboratorium Tensometria-raport moj, ZiIP, II Rok ZIP, wytrzymalosc, WYDYMA ROK II semestr III-IV
TEMATY EGZAMINACYJNE Z PBU pwsz ioś kalisz, inżynieria ochrony środowiska kalisz, a pwsz kalisz ioś,
Lab.-Statyczna proba skręcania, ZiIP, II Rok ZIP, wytrzymalosc, WYDYMA ROK II semestr III-IV, WYDYMA
Test DA DB IV, BUDOWNICTWO, Wytrzymałość materiałów, Wytrzymałość Materiałów pul
kolokwium zaliczeniowe wytrzymalosc (2), Studia, IV semestr, Wytrzymałość materiałów 2, wytrz
więcej podobnych podstron