Sprawozdanie z laboratorium elektroniki
Badanie sterownika tyrystorowego
Sekcja 5
Andrzej Wjcik
Damian Ukleja
Licencjat Zaoczny
1. Układy sterownicze (sterowniki) prądu zmiennego
Warunki pracy sterowników. W wielu urządzeniach przemysłowych zachodzi konieczność uzyskania zmian natężenia prądu zmiennego w obwodzie odbiornika energii, np. silnika, grzejnika pieca elektrycznego itd. Zmiany takie można uzyskać prrzez zastosowanie transformatora regulacyjnego, regulatora indukcyjnego lub dławika nasyconego, jednakże często wygodniej jest do tego celu użyć układu elektronicznego, ze względu na jego małe opóźnienie działania i łatwość regulacji w szerokich granicach. W układach takich, zwanych sterownikami prądu zmiennego, wykorzystuje się między innymi właściwości tyrystorów do zmiany skutecznej wartości prądu; uzyskuje się ją przez opóźnienie zapłonu poszczególnych elementów prostowniczych.
Najprostszym układem sterowania prądu zmiennego jest tzw. układ odwrotnie-równoległy w, którym w obwód zasilania są włączone przeciwsobnie dwa jednakowe sterowane elementy prostownicze. Oba te elementy są sterowane w ten sposób, że uzyskują jednakowe opóźnienie zapłonu o kąt α, przy czym jeden z nich przewodzi prąd w dodatniej, drugi zaś w ujemnej połowie okresu napięcia zasilania. jeżeli obwód obciążajacy zawiera tylko rezystancję R, to impulsy prądu obciążenia wyrażają się (przy pominięciu spadku napiecia na elementach prostowniczych) wzorem
dla θz ≤ ωt ≤ π oraz π+θz ≤ ωt ≤ 2π
Wartość skuteczna prądu
przy czym
Moc czynną odbiornika można wyrazić w postaci
Moc pozorna pobierana z sieci wynosi
2. Tyrystor jako element układów sterowniczych
Tyrystor - budowa i zasada działania. Tyrystor jest elementem półprzewodnikowym, czterowarstwowym typu p-n-p-n (patrz rys.1.1),
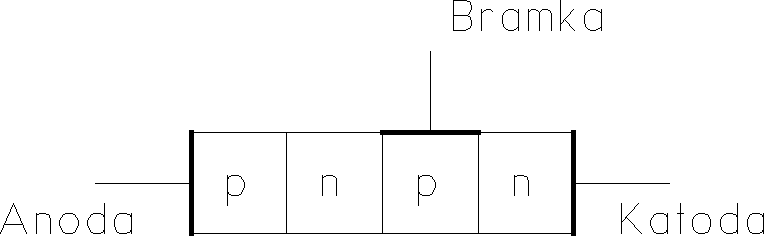
Rys. 1.1 Ogólna budowa tyrystora
którego działanie sprowadza się głównie do tego, że tyrystor nie przewodzi prądu dopóki na bramkę nie poda się napięcia załączającego. W momencie podania napięcia na bramkę tyrystor zaczyna przewodzić, po czym napięcie to można wyłączyć, a tyrystor będzie nadal przewodził.Gdy nie podajemy napięcia na bramkę, dwa złącza zewnetrzne są spolaryzowane w kierunku przewodzenia, a środkowe w kierunku zaporowym. Po doprowadzeniu napięcia do bramki zostaje doprowadzone napięcie dodatnie względem katody. zazwyczaj wartość tego napięcia to ok. 0,2V. Obniży się rezystancja środkowego złącza, co prowadzi do zapłonu tyrystora. Czas potrzebny na przełączenie tyrystora w stan przewodzenia zależy od amplitudy impulsu zapłonowego. im napięcie jest mniejsze tym czas zadziałania jest dłuższy. Zależy on również od czasu trwania impulsu. Wyłączenie tyrystora następuje na skutek obniżenia do zera napięcia UAK lub przez zmianę biegunowości tego napięcia. Do zalet tyrystora należą min.: mały spadek napięcia (0,8 - 2V) i szybkość przełączania (znacznie większa niż w przełącznikach mechanicznych).Tyrystory znalazły zastosowanie w urządzeniach elektronicznych, urzadzeniach linii przesyłowych prądu stałego wysokiego napiecia (do kilkuset kV) i odbiornikach telewizyjnych (układy odchylania).
3. Opracowanie uzyskanych wyników
Badanie sterownika w układzie dwupołówkowym.
Otrzymany wykres pozwala nam przeanalizować zagadnienia energetyczne w układzie odwrotnie - równoległym. Zauważamy, że nalwiększą moc czynną odbiornika uzyskuje się przy pełnym wysterowaniu , tj. dla α=0, wtedy też uzyskuje się największą wartość współczynnika mocy układu będącą przy pominięciu spadku napięcia na sterowniku (napięcie przewodzenia tyrystorów) ilorazem mocy czynnej odbiornika do mocy pozornej pobieranej z sieci. Wartość ta dla α=0 równa jest 1 i jest osiągana dla minimalnej wartości stałej czasowej τ=RC części sterującej badanego układu, gdzie R jest wartością rezystancji potencjometru regulującego mocą doprowadzaną do obciążenia a C = 1μF pojemnością szeregową zestawionego z nim kondesatora.
Uniwesytet Śląski
Pracownia Elektroniki 2
Uniwersytet Śląski
Instytut Fizyki
Zakład Elektroniki i Techniki Komputerowej
Pracownia Komputerowa
Wyszukiwarka