Grupa A
1.Interpolacja trygonometryczna
Załóżmy, że znamy wartości pewnej ciągłej i okresowej funkcji f(x) o okresie 2π w 2n+1 węzłach. Jako bazę interpolacji przyjmujemy zbiór funkcji trygonometrycznych
![]()
Otrzymujemy zatem wielomian interpolacyjny w postaci![]()
zawierający 2n+1 nieznanych parametrów.
Ze względu na uproszczenie obliczeń najistotniejszy jest przypadek interpolacji funkcji określonej na zbiorze równoodległych węzłów xi∈[0,2π] dobranych według następującej zależności
![]()
, gdzie i = 0, 1, ..., 2n
Czyli
![]()
Warunek interpolacji prowadzi do układu równań liniowych w postaci
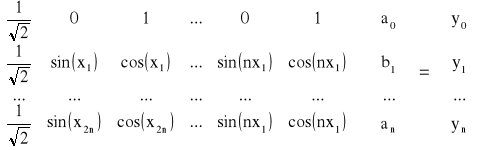
Współczynniki pierwszego wiersza macierzy X wynikają z wartości funkcji sin(hx) i cos (hx) dla x0 = 0. Przedstawiony układ równań rozwiązuje się natychmiastowo, ponieważ macierz X-1 można wyznaczyć z zależności
![]()
2. Aproksymacja średniokwadratowa
Niech dana będzie funkcja y=f(x), która w pewnym zbiorze X punktów x0, x1, ..., xn przyjmuje wartości y0, y1, ..., yn. Wartości te znane tylko w przybliżeniu z pewnym błędem (np. jako wyniki pomiarów). Poszukujemy takiej funkcji Q(x) przybliżającej daną funkcję f(x), która umożliwi wygładzenie funkcji f(x), czyli pozwoli z zakłóconych błędami danymi wartości funkcji przybliżonej otrzymać gładką funkcję przybliżającą.
Niech ϕj(x), j=0, 1,...,n będzie układem funkcji bazowych. Poszukujemy wielomianu uogólnionego Q(x) będącego najlepszym przybliżeniem średniokwadratowym funkcji f(x) na zbiorze X=(xj). Funkcja przybliżająca ma postać
![]()
Przy czym współczynniki ai są tak określone, aby wyrażenie
![]()
![]()
dla i=0, 1, ..., n
było minimalne. Funkcja w(x) jest z góry ustaloną funkcją wagową.
Aby wyznaczyć współczynniki ai oznaczamy odchylenie


gdzie Rj jest odchyleniem w punkcie xj.
Następnie obliczamy pochodne cząstkowe funkcji H względem ai. Z warunku
![]()
, gdzie k = 0, 1, ..., n
otrzymujemy układ m+1 równań o niewiadomych ai zwany układem normalnym

, gdzie k = 0, 1, ..., n
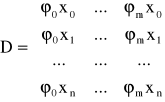
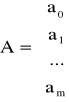
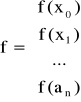
Jeśli wyznacznik tego układu jest różny od zera to rozwiązaniem układu jest minimum funkcji H. W zapisie macierzowym układ przyjmuje postać
![]()
gdzie
3. Kwadratury Newtona - Cotesa - >wzory zamknięte
Poniżej znajdują się wzory zamknięte dla n = (1..3):
wzór trapezów 
wzór parabol (Simpsona
wzór Bessela

4. Numeryczne rozwiązywanie układów równań liniowych
Metoda iteracji prostej (Jakobiego):
Metoda ta dla równania X=W*X+Z polega na przyjęciu zerowego przybliżenia wektora X=Xo, a następnie przeprowadzenia obliczeń iteracyjnych za pomocą zależności:
Xi+1=W*Xi+Z i=0,1,...
Liczba kroków, które należy wykonać, aby uzyskać wymaganą dokładność rozwiązania, jest z reguły dość duża i istotnie zależy od przyjęcia punktu startowego Xo. Punkt ten najczęściej się dobiera na podstawie dodatkowych informacji o fizycznych aspektach problemu.
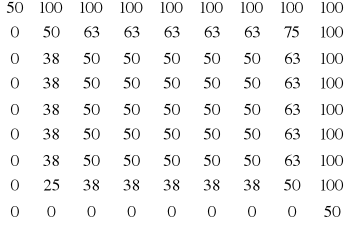
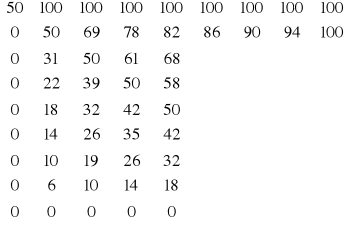
Przykład: Metodę iteracji prostej wykorzystano do rozwiązania układu równań będącego różnicową aproksymacją równania Laplace`a z warunkami brzegowymi I rodzaju. Równanie to opisuje stacjonarne pole temperatury w pewnym dwuwymiarowym obszarze, na którego brzegach temperatury są znane. Jako przybliżenie zerowe przyjęto wartość temperatur w wnętrzu obszaru T=50°C, wymiary prostokątne a=b=0,8 cm.
5. Metoda Rungego - Kutty 4 rzędu rozwiązywania równań różniczkowych I rzędu
Metoda wyprowadzona przez rozwinięcie f(t,y) w szereg Taylora 4 rzędu, pozwala określić stałe we wzorze (wzór ogólny R-K). Poniżej przedstawiono najczęściej stosowaną metodę 4 rzędu
k1 = hf (ti, wi);k2 = hf (ti + ½ *h, wi + ½ *k1);k3 = hf (ti + ½ *h, wi + ½ *k2) ;k4 = hf (ti+h, wi+k3)
ostatecznie: wi+1=wi + 1/6 (k1 + 2k2 + 2k3 + k4) (38)
Interpretacja graficzna:f1 = f (ti, wi);f2 = f (ti + ½ * h, wi+1 + h f1);f3 = f (ti + ½ * h, wi + ½ * h f2);f4 = f (ti + h, wi + h f3)
linia 3-4 nie jest łamana - jest prosta !!! (na 99%) :)
Metoda R-K jest najczęściej stosowaną metodą do rozwiązywania układów równań różniczkowych
6. Rozwiązywanie układów równań różniczkowych I rzędu
Grupa B
1.Interpolacja Lagrange`a
W interpolacji wielomianowej Lagrange'a dla n+1 węzłów interpolacji![]()
przyjmuje się funkcje bazowe w postaci
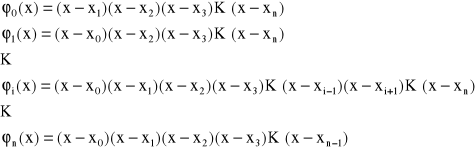
Funkcje te są wielomianami stopnia n zbudowanymi w ten sposób, że w funkcji bazowej φ1 brakuje czynnika (x-xi). Zatem wielomian interpolacji wyraża się następującym wzorem:
![]()
współczynniki a0 ... an tego wielomianu wyznaczamy z równania:
X · A = Y, przy czym macierz X ma postać:

Macierz posiada tylko główną przekątną niezerową w związku z tym układ równań X · A = Y rozwiązuje się natychmiastowo
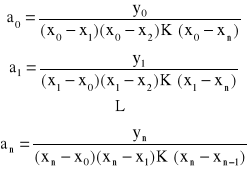
Można więc wielomian interpolacyjny Lagrange'a zapisać w postaci ułamka:![]()
lub krócej
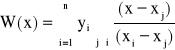
, j = 0, 1, ..., n
2. Aproksymacja trygonometryczna
Często spotykamy się z przypadkiem, gdy funkcja f(x) jest okresowa. Taką funkcję wygodniej jest aproksymować, wielomianem trygonometrycznym o bazie:
1, sin x, cos x, sin 2x, cos 2x, …, sin kx, cos kx
Jeżeli f(x) jest funkcją dyskretną określoną w dyskretnym zbiorze równoodległych punktów i ich liczba jest parzysta i wynosi 2L (dla nieparzystej liczby punktów rozumowanie jest analogiczne), niech:
![]()
dla i = 0, 1, …, 2L-1
Baza jest ortogonalna nie tylko na przedziale <0, 2π>, ale też na zbiorze punktów xi, przy czym warunki ortogonalności mają postać:
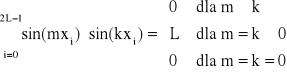
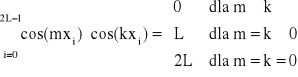
![]()
dla m, k dowolnych, przy czym m i k zmieniają się od 0 do L
Przybliżeniem funkcji f(x) na zbiorze punktów xi jest wielomian trygonometryczny:
![]()
, n<L
Współczynniki aj i bj wielomianu wyznaczamy tak, aby suma kwadratów różnic
![]()
była minimalna.
Korzystając z warunku ortogonalności otrzymujemy rozwiązanie układu normalnego
w postaci: ![]()
dla j=1, 2, …, n
3. Kwadratury Newtona - Cotesa -> wzory otwarte
Wzory kwadratur nie opartych na węzłach będących końcami przedziału całkowania nazywamy wzorami otwartymi Newtona - Cotesa
Jeżeli dla skończonego [a ; b] przedziału wybierzemy zbiór punktów węzłowych {x0, …, xn} takich, że :![]()
gdzie:
![]()
dla i=(0, …, n)
Oraz
![]()
W oparciu o Twierdzenie 1 można również wyznaczyć wzory kwadratur otwartych. Wówczas wzory kwadratur dla n parzystych mają postać

oraz dla n nieparzystych mają postać:

wzór prostokątów




4. Numeryczne rozwiązywanie układów równań nieliniowych
Dany jest układ równań nieliniowych z n niewiadomymi
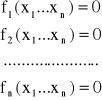
który możemy zapisać w postaci wektorowej
f(x)=0
gdzie:
O funkcjach fi(x1...xn) dla i = 1, 2, ..., n zakładamy, że mają ciągłe pochodne pierwszego rzędu w pewnym obszarze zawierającym odosobniony pierwiastek układu równań. Niech
x(k) = {x1(k), ..., xn(k)}
będzie k-tym przybliżeniem pierwiastka a = {a1, ..., an} równania.
Dokładną wartość pierwiastka wyraża wzór a = x(k) + ε(k)
Gdzie ![]()
jest błędem pierwiastka przybliżonego ![]()
. Skoro istnieje ciągła pochodna funkcji f(x) możemy zapisać:
![]()
Zastępując błąd ![]()
przyrostem ![]()
i porównując prawą stronę powyższego wyrażenia do zera otrzymujemy równanie liniowe:
![]()
Wzór ten stanowi zapis rekurencyjny dla metody Newtona w postaci macierzowej.
Pochodna f'(x) jest macierzą Jakobiego
Przyjmując, że ![]()
jest macierzą nieosobliwą możemy równanie liniowe przekształcić do postaci:![]()
stąd przyjmując dowolną wartość ![]()
otrzymujemy ciąg kolejnych przybliżeń pierwiastka równania ![]()
uzyskanych metodą Newtona.
5. Metoda Eulera rozwiązywania równań różniczkowych I rzędu
Rozpatrzmy zadanie znalezienia funkcji y=y(t), które dla ![]()
spełnia równanie różniczkowe zwyczajne pierwszego rzędu:
![]()
(7)
oraz warunek początkowy
y(a)=y0 (8),
gdzie f jest daną funkcją dwu zmiennych. Warunek wystarczający istnienia i jednoznaczności rozwiązania zadania (7) oraz (8) jest warunek ciągłości funkcji f(t,y)
Metoda ta rzadko jest używana w praktyce, natomiast ze względu na jej prostotę, zostanie przedstawiona w celu zobrazowania i zrozumienia technik stosowanych w bardziej zaawansowanych metodach, pomijając przy tym złożone działania matematyczne. Przedmiotem rozważań będzie poniższe równanie.
![]()
, gdzie ![]()
oraz y(a)=a (10)
Na rozwiązanie powyższego zagadnienia będziemy obliczać przybliżone wartości funkcji yi=y(ti), gdzie ti=a+ih, h=(b-a)/N, dla którego i=(0,1, ..., N), gdzie ti nazywane są punktami węzłowymi, natomiast h odległością między nimi.
Rozwiniemy y(t) w szereg Taylora w celu wyprowadzenia metody Eulera. Zakładając, że y(t) jest jedynym rozwiązaniem (10) oraz posiada drugą pochodną, która jest ciągła w przedziale [a, b] wówczas dla każdego i=1, 2, ..., N.
Wykorzystując powyższe założenia możemy zapisać:![]()
(11), gdzie ![]()
Oznaczamy h=ti+1-ti, wówczas otrzymujemy:
![]()
(12)
Użyjemy podstawienia y'(t)=f(t, y), wówczas otrzymujemy:![]()
(13)
Zapisując ωi≈y(ti) oraz pomijając błąd przybliżenia otrzymujemy ωi+1=ωi+hf(ti, ωi) (14)
Powyższy wzór nazywamy metodą Eulera - wzór ten nazywany jest inaczej równaniem różniczkowym, gdyż można zapisać:
![]()
(15)
Aby wyznaczyć wartość szukanej funkcji y(x) w następnym kroku h, wykorzystujemy poprzednią wartość funkcji oraz wielkości zmian funkcji - dzięki pochodnej. Natomiast uwzględniając błąd przybliżenia wzór (13) przyjmuje postać:
![]()
, gdzie ![]()
(16)
Lokalny błąd dyskretyzacji τi+1(h)
![]()
(17)
dodatkowo możemy określić krok h, dla którego błąd lokalny jest mniejszy od zadanej dokładności δ
![]()
, gdzie ![]()
Globalny błąd dyskretyzacji g(x)
g(t)= ω(t)-y(t) (19)
Dla wybranego punktu ti możemy zapisać: gi=ωi-y(ti) (20), wówczas
![]()
, gdzie L- liczba Lipschnitz`a
6. Rozwiązywanie równań różniczkowych wyższych rzędów
Wyszukiwarka