II INF |
Jarosław Jasiński Andrzej Głąb |
9.III.98r |
Nr.ćw. 5 |
BADANIE REGULATORA PID |
|
Podstawowe rodzaje regulatorów o działaniu ciągłym (traktowanych zwykle jako elementy liniowe) realizują funkcje typu proporcjonalno(P) -całkująco(I) -różniczkującego(D), określane za pomocą transmitancji :
gdzie kp- wzmocnienie proporcjonalne, Ti- czas zdwojenia (stała czasowa akcji całkującej),
Td- czas wyprzedzenia (stała czasowa akcji różniczkującej).
Oznacza to ,że w najogólniejszym przypadku odchylenie regulacji jest przez regulator zarówno wzmacniane, jak i całkowane oraz różniczkowane.
Przedstawiona powyżej postać transmitancji regulatora PID jest uproszczona ,gdyż działania różniczkującego idealnego o transmitancji Tds nie daje się w praktyce zrealizować. Dlatego częściej akcja różniczkująca opisywana jest wyrazem:
a transmitancja regulatora PID rzeczywistego jest wówczas następująca:
Jednak w naszym ćwiczeniu analizowany był regulator PID idealny.
Interpretacja czasu całkowania Ti jest następująca : jeśli wyłączymy część różniczkującą regulatora, tzn. nastawimy Td=0 i podamy na wejście skok jednostkowy, czyli e(t)=1(t), to
Sytuacja ta przedstawiona została na wykresie 8. Mamy więc x(Ti)=2x(0)- stąd nazwa "czas zdwojenia".
Jeśli natomiast wyłączymy część całkującą regulatora, nastawiając Ti= i podamy na wejście regulatora PD sygnał e(t)=t 1(x), to na wyjściu mamy :
![]()
Zatem sygnał wyjściowy x(t) regulatora PD wyprzedza w tym przypadku sygnał x(t) regulatora P (równy x(t)=t kp) o czas Td- stąd nazwa czas wyprzedzenia.
Regulator PID (transmitancja regulatora) :
Transmitancja widmowa :
Część rzeczywista i urojona transmitancji widmowej :
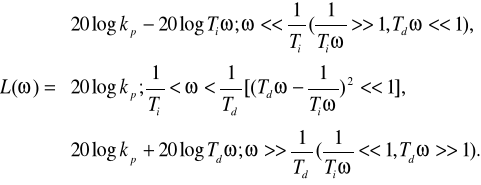
Logarytmiczne charakterystyki amplitudowa i fazowa :
Asymptotyczna charakterystyka amplitudowa (przy założeniu, że Ti >Td) :
Funkcja przejścia regulatora typu PID ma postać :
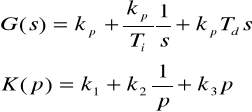
Chcąc uzyskać regulator o takiej funkcji przejścia, musimy zastosować we wzmacniaczu proporcjonalnym sprzężenie zwrotne o funkcji przejścia
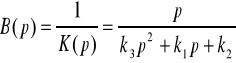
Funkcja B(p) jest transformatą funkcji b(p) równej zeru dla t=0 .
Element o takiej funkcji przejścia można uzyskać np. przez połączenie równoległe dwóch elementów inercyjnych pierwszego rzędu B1 i B2 o rożnych stałych czasowych. Przyjmijmy, że
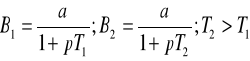
Wypadkowa funkcja przejścia niech będzie równa :
Rzeczywistą funkcję przejścia możemy obliczyć ze wzoru :

Uwzględniając, że k jest bardzo duże :

Jeśli porównamy ten wzór z ogólną formą zapisu przyjętego dla regulatorów firmowych
mamy dla naszego przypadku :
1) zakres proporcjonalności
2) czas różniczkowania
3) czas całkowania
![]()
Zauważamy, że :
1) żądany zakres proporcjonalności V możemy w regulatorze tego typu nastawić przez odpowiedni dobór a, nie wpływając przez to na wartość czasu różniczkowania i czasu całkowania ,
2) jakakolwiek zmiana wartości czasu całkowania przez zmianę T1 i T2 wpływa na wartość V
i czasu różniczkowania (interakcja) ,
3) jakakolwiek zmiana czasu różniczkowania przez zmianę T1 czy T2 wpływa na wartość V i czasu całkowania (interakcja) .
Aby przeprowadzić analizę dołączonych do ćwiczenia labolatoryjnego wykresów przedstawiających regulator PID w odpowiedzi na zmieniające się stałe takie jak: wzmocnienie proporcjonalne(k ), czas całkowania(Ti) oraz czas różniczkowania(Td), należy ogólną postać transmitancji regulatora PID zmienić na postać czasową. Wówczas :
Rozważając wykres nr 1(schemat 1) zauważamy poprawność naszej analizy. Należy transmitancję regulatora PID przedstawić w postaci czasowej :
![]()
![]()
pamiętając o tym, że dla tego przypadku kp=1, Ti=1, Td=1.
Gdy patrzymy na wykres nr 2 i 3(gdzie kp równe jest odpowiednio 3 i 1, czas całkowania zmienia się odpowiednio 1 i 3 ,natomiast czas różniczkowania jest stały) zauważamy zmianę na wykresie. Część wykresu odpowiadająca za człon całkujący i różniczkujący rośnie od punktu równego kp.
Gdy zmianie ulega czas całkowania (wykres 4- gdy kp=1, Ti=2, Td=1 i wykres 5- gdy kp=1, Ti=3, Td=1) część wykresu należąca do członu całkującego wraz ze wzrostem Ti wolniej dąży do nieskończoności.
Podczas zmian czasu różniczkowania (wykres nr 3 i 4) zauważamy zmianę na wykresie tej części, która jest odpowiedzialna za człon różniczkujący.
Gdy czas różniczkowania równy jest zero(Td=0) wówczas postać naszej transmitancji wygląda następująco :
Gdy (wykres 5) kp=1, Ti=1, Td=0 i obserwujemy odpowiedź na wymuszenie skokowe :
Jest to zgodne z przedstawionym wykresem nr 5.
Na wykresach nr 11 i 12 przedstawiona została odpowiedź na liniowe narastanie, gdy kp=1, Ti=1, Td=0. Część wykresu odpowiadająca za człon różniczkujący nie istnieje. Postać czasowa takiej transmitancji przyjmuje następującą postać :
Analizując wykres nr 6 zauważamy chęć likwidacji członu całkującego przez zwiększenie czasu całkowania Ti=999, gdy kp=1 i Td=1. Część wykresu odpowiedzialna za człon całkujący nie istnieje. Transmitancja i jej postać czasowa w odpowiedzi na skok jednostkowy wyglądałaby wówczas następująco :
Gdy analizujemy (wykres nr 8) odpowiedź na liniowe narastanie transmitancja przyjmuje postać :
Ta część wykresu, która jest odpowiedzialna za człon proporcjonalny oraz całkujący w rozpatrywanym przez nas przypadku nie istnieje. Na wykresie obserwujemy więc odpowiedź członu proporcjonalnego na liniowe narastanie.
Gdy kp=1, Ti=1, Td=0 i musimy wziąć pod uwagę dodatkowy obiekt :
Podobna sytuacja ma miejsce w przypadku wykresu nr 11 i 12, ale na wejście podany jest jeszcze skok jednostkowy. Postać czasowa powstałej transmitancji będzie wyglądać następująco :
Obecność Trasport delay zmienia nam trochę żądaną postać wykresu.
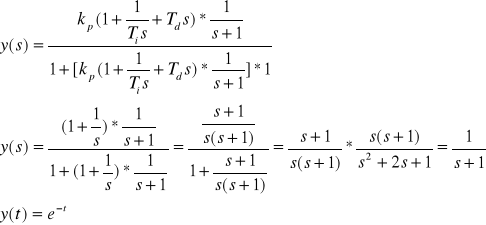
Analiza dalszych wykresów opiera się na sprawdzeniu nastaw regulatora, transmitancja przyjmuje postać :
Nasze ćwiczenie polega na zmianie kolejno czasu całkowania, czasu różniczkowania oraz wzmocnienia proporcjonalnego tak, by uzyskać jak najmniejszy uchyb. Jedną z metod polega na wyłączeniu Ti (przez bardzo duże zwiększenie jego wartości)- uchyb statyczny :
Jednak wśród praktyków najbardziej rozpowszechniona jest reguła doświadczalnego nastawiania regulatorów opracowana przez Zieglera i Nicholsa, która prowadzi do uzyskania przebiegów przejściowych z przeregulowaniem około 20% i minimum czasu regulacji tr. Nastawianie przeprowadza się już po zainstalowaniu regulatora w układzie. Kolejność postępowania przy stosowaniu tych reguł jest następująca :
1. należy nastawić regulator na działanie tylko proporcjonalne(P). Działania całkujące i różniczkujące powinny być wyłączone przez nastawienie bardzo dużego Ti oraz bardzo małego Td,
2. należy zwiększać wzmocnienie proporcjonalne kp regulatora, aż do wystąpienia oscylacji niegasnących w układzie (granica stabilności),
3. na taśmie rejestratora należy zmierzyć okres tych oscylacji Tosc, a na skali regulatora należy odczytać krytyczne wzmocnienie proporcjonalne (kp)kr, przy którym one wystąpiły,
4. zależnie od typu regulatora, należy przyjąć nastawy (w naszym przypadku dla regulatora PID):
Metodą doświadczalne doszliśmy do najlepszego przypadku, gdy :
gdzie kp- wzmocnienie proporcjonalne, Ti- czas całkowania, Td- czas różniczkowania, e- uchyb.
Zastosowanie regulatora PID znacznie poprawia jakość regulacji; zmniejsza się czas regulacji w stosunku do innych regulatorów, w znacznym stopniu zmniejszeniu ulega przeregulowanie.
Wyszukiwarka