1. Autopilot - urządzenie które zastępuje czynności sternika poprzez układ automatycznego sterowania
Autopilot jest bezpośrednio sprzężony z układem sterowym (urządzenie wykonawcze). Wpływa on bezpośrednio na wychylenie płetwy sterowej.
Obecnie statki morskie są w zasadzie sterowane ręcznie tylko podczas przechodzenia przez kanały oraz cieśniny morskie o dużym natężeniu ruch oraz w razie ciężkiej sztormowej pogody.
Obsługa maszyny sterowej odbywa się z kolumny sterowej na mostku lub na skrzydłach mostka
Wymagane jest również posiadanie stanowiska sterowania awaryjnego które polega na ręcznej obsłudze siłowników odpowiedzialnych za wychylanie płetwy sterowej.
2. Korzyści płynące z faktu korzystania z autopilota:
- wzrost średniej prędkości statku
- oszczędność w eksploatacji statku
- skrócenie czasu rejsów
- zmniejszenie zużycia paliwa
3. Urządzenie sterowe składa się z trzech elementów:
a) telemanipulator - steruje pracą maszyny sterowej
b) maszyna sterowa - wyróżnimy 2 rodzaje ze względu na sposób przekładni:
- mechaniczna - urządzenia elektroniczno-mechaniczne
- hydrauliczne - urządzenia elektroniczno hydrauliczne
c) ster
4. Wymagania stawiane Autopilotom:
- utrzymywanie statku na określonym kursie
- optymalna praca przy zmianach kursu dokonywanych na pełnym morzu
(zmiana wychylenia wpływa na prędkość statku i zużycie paliwa)
5. Sterowność i zwrotność statku:
Stateczność:
- Statek stateczny kursowo - po odchyleniu się statku od kursu pierwotnego statek kontynuuje ruch po nowym kursie
- Statek niestateczny kursowo Roz odchylony od kursu z czasem zwiększa to odchylenie. Sterowanie takim statkiem jest bardzo uciążliwe.
Zwrotność:
- jednaki zwrotniejsze posiadają pogorszoną stateczność kursową
- statki mające lepszą stateczność są mniej zwrotne
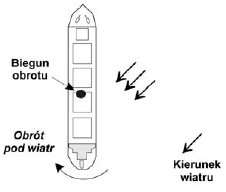
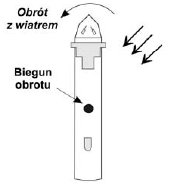
6. Zaburzenia o charakterze ciągłym:
- Statyczne działanie wiatru (są tak silne że czasami aby je równoważyć trzeba wychylić ster nawet o 10 stopni):
Statki zawietrzne - odchylają się od kursu z wiatrem
Statki nawietrzne - odchylają się od kursu pod wiatr
- Przechyły statku (rozmieszczenie paliwa, towaru, balastów)
- Działanie śruby (Płytkie akweny oraz nierówne dno)
7. Zaburzenia doraźne:
- Oddziaływanie dynamiczne fali - fale uderzając o kadłub odchylają go od kursu
- Praca steru - wychylenia na lewą i prawą burtę w celu utrzymania statku na kursie również powodują odejście statku z nakreślonej trajektorii
8. Utrzymywanie statku na żądanym kursie:
- Statki handlowe ze względu na dużą stateczność kursową same wracają na kurs bez pomocy steru,
- Sternik uruchamia ster przy odchyleniu od kursu większym od jednego stopnia,
- Przy większym wychyleniu steru sternik wychyla statek o niewiele większy kąt i przytrzymuje go dłużej w zadanej pozycji,
- Doświadczony sternik przewiduje tendencję ruchu statku
9. Automatyczne sterowanie statkiem;
- Układ Otwarty - Układ w którym nie ma oddziaływania wielkości wyjściowej na wielkość wejściową. Układy otwarte nie SA w stanie równoważyć zmian wewnętrznych własności obiektów sterowania oraz z zasady nie mogą sterować obiektami niestabilnymi
- Układ Zamknięty - układ w którym istnieje sprzężenie zwrotne. Jednym z podstawowych układów automatyki jest układ z ujemnym sprzężeniem zwrotnym. Układ ten charakteryzuje się mniejszym wpływem zakłóceń działających na układ regulacji w porównaniu z układem otwartym.
10. Statek jako dynamiczny układ sterowania :
W celu uzyskania kontroli nad systemem (statkiem) należy zastosować układ regulacji który będzie określał wpływ sygnałów u(t) i y(t) (wejście i wyjście) i będzie wypracowywał odpowiednią decyzję:
Statek jako obiekt składa się z następujących bloków:
- blok sterowania - autopilot
- blok maszyny sterowej - człon wykonawczy
- blok sprzężenia zwrotnego
- blok lokalnego sprzężenia zwrotnego - zwiększa stabilność całego układu.
Ogólna zasada działania układu:
Odchyłka kursowa = Kurs rzeczywisty - kurs zadany
a) Ma to na celu uwzględnienie wartości odchyłki kursowej i późniejszy powrót na zadany kurs.
b) Wewnętrzne sprzężenie zwrotne przekazuje sygnał wychylenia steru do regulatora i ogranicza tym samym ilość włączeń maszyny sterowej
c) Główne ujemne sprzężenie zwrotne jest realizowane przez człon miarowy którym jest żyrokompas-przekazuje do autopilota kurs rzeczywisty statku
11. Regulacja kursu:
Aby uzyskać dobrą regulację kursu statku konieczne jest dopasowanie nastaw regulatora kursu do własności dynamicznych statku
Regulatory stosowane w autopilotach morskich są najczęściej typu:
Adaptacyjnego - Ich własności dynamiczne są optymalizowane przez automatyczne dostosowanie się warunków pracy obiektu. Adaptacja dotyczy tutaj dostrajania parametrów regulatora zawierającego tor adaptacji, do zmiennych parametrów statku jako obiektu sterowania:
- kątem wychylenia steru
- prędkością obrotu śruby
- wiatrem
- falowaniem
Dodatkowo w Autopilotach stosuje się element nieliniowy o regulowanej strefie nieczułość aby zwiększać lub zmniejszać czułość ingerencji autopilota.
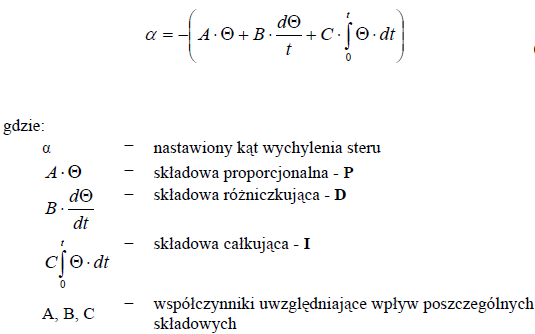
12. Parametry nastawcze regulatorów, programowanie autopilotów:
Parametry regulatora podlegające regulacji to:
- Wychylenie - powoduje zmianę kąta wychylenia steru oraz czas pozostawania płetwy sterowej w wychyleniu skrajnym, czyli zmianę współczynnika wzmocnienia, interpretacja członu P,
- Tłumienie - powoduje zmianę wartości współczynnika wagowego członu D,
- Czułość - powoduje zmianę zakresu strefy martwej regulatora, związanej z myszkowaniem statku, interpretacja członu całkującego I,
-Ograniczenie wychylenia steru - pozwala na ograniczenie maksymalnego kąta wychylenia płetwy sterowej podczas pełnej prędkości statku w czasie automatycznej pracy urządzenia sterowego.
- Przy spokojnym morzu - Czułość na wartość minimalną aby ograniczyć strefę martwa statku,
- Średni stan morza - Zwiększamy strefę martwą statku i tłumienie aby statek oscylował możliwie blisko wyznaczonego kursu,
- Wysoki stan morza - tłumienie i czułość na poziomie maksymalnym
- Fala nadążająca (od rufy) - zwiększamy wychylenie
13. Zadanie regulatora adaptacyjnego:
- dobór optymalnych parametrów nastawialnych autopilota
- wyprzedzenie ruchu steru w stosunku do ruchu statku
- zmniejszenie częstotliwości i wartości kąta wychyleń steru
Współczesne autopiloty adaptacyjne można podzielić na 2 grupy:
- autopiloty z adaptacją autonomiczną - wbudowany model odniesienia
- autopiloty, wykorzystujące do adaptacji informacje z zewnątrz - same przestrajają niektóre wartości układu sterowania ponieważ jest w stanie pobierać te informacje z echosondą, logiem, miernikiem kołysań.
14. Tendencje dotyczące rozwoju autopilotów:
- oparte o algorytmy genetyczne i regulatory neuronowe
- rozwój autopilotów które wykorzystywane są podczas pływania po akwenach ograniczonych które musza zapewniać stałą prędkość kątowa oraz stały promień zwroty przy zmiennych zdolnościach manewrowych statku.
- Autopiloty sprzęgane automatycznie z Echosondą, Logiem oraz Odbiornikiem GPS.
- Możliwość sterowania statkiem z poza mostka - kilka kontrolerów autopilota.
15. Wymagania Prawne:
- kurs z dokładnością do 1 stopnia przy 6 węzłach,
- amplituda myszkowania 1 stopień przy 3 stopniach skali Beauforta, a 4 stopnie przy 5 Beauforta,
- blokada wychylenia steru do 35 stopni na burtę
- ręczna regulacja czułości w zależności od warunków oraz regulacja w zależności od właściwości manewrowych statku,
- wskaźnik o maksymalnym wychyleniu steru bądź osiągnięciu maksymalnego wychylenia.
- urządzenie do ręcznego sterowania maszyną sterową na pulpicie autopilota
- łatwy i prosty układ sterowania bez skomplikowanych elementów stosowanych przy sterowaniu automatycznym
- Przejście z automata na manuala przy jednej manipulacji w nie więcej niż 3 sekundy,
- Możliwość zmiany kursu statku na dowolny inny o 15 stopni bez przechodzenia na ręczne sterowanie
16. Skróty wykorzystywane w autopilotach:
COG - Course over ground - Kąt drogi nad dnem
Crs - Course - Kurs rzeczywisty
Dim - Dimmer - Podświetlenie konsoli
HDG - Heading - bieżący kurs rzeczywisty
CC - Compas Course - Kurs magnetyczny
Radius - maksymalny promień zwrotu
ROT - rate of turn - maksymalna prędkość wykonywania zwrotu przez statek w trybie Auto.
Set Course - Wartość zadana kursu
Stering mode Auto, manual, port wing, starborard wing, Joystick
Turn - Manewr o określony kąt
Alarmy:
Deviation alarm - róznica pomiędzy kursem zadanym a rzeczywistym jest większa od wartości granicznej np. 5 stopni.
Missing Heading data - Utrata informacji o kursie
Power Failture - Awaria napedu płetwy sterowej
Watch Alarm - Alarm generowany o określonej częstotliwości wymuszający ręczne wyłączenie go przez co zapewniona jest kontrola pracy system.
17. Echosondy - urządzenia wykorzystujące propagację fal w środowisku wodnym, mające szerokie zastosowanie w działalności morskiej. Podstawowe zastosowanie sond to:
- nawigacja morska
- hydrografia
- hydrolokacja
- geotechnika
- rybołówstwo
18. Klasyfikacja urządzeń hydroakustycznych:
- echosondy
- hydrolokatory
- logi hydroakustyczne
- urządzenia hydroakustyczne specjalnego przeznaczenia
19. Parametry mierzone przez urządzenia hydroakustyczne:
- czas pokonania pewnej odległości przez sygnał akustyczny - zapas wody pod stępką
- wielkość amplitudy odebranego sygnał akustycznego - pomiar kierunku
- różnica częstotliwości pomiędzy sygnałem nadanym i odebranym - pomiar prędkości
- różnica fazy - pomiar odległości (urządzenia specjalnego przeznaczenia)
20. Podział Echosond:
- nawigacyjne
- oceanograficzne
- hydrograficzne
- geodezyjne
- rybackie
-specjalnego przeznaczenia
Płaszczyzna pracy:
- pomiar w płaszczyźnie pionowej
- pomiar w płaszczyźnie poziomej
- pomiar pod dowolnym kątem
21. Charakterystyka fali hydroakustycznej:
- częstotliwość do 20 do 200kHz
- rozprzestrzenianie się z dużą prędkością - 1500 m/s
- w przybliżeniu prostoliniowa propagacja fal
- możliwość przenoszenia energii na stosunkowo znaczną odległość
- łatwość kierunkowego przenoszenia energii na stosunkowo znaczną odległość
- zdolność odbijania się części emitowanej energii od spotykanych na drodze przeszkód
- kąt odbicia równy kątowi padania fali
- stosunkowo łatwy sposób uzyskiwania fali ciśnieniowej z energii elektrycznej
- prędkość rozchodzenia się fali zależna od prędkości dźwięku w wodzie, zasolenia i temperatury
Wady:
- duże tłumienie ośrodka
- rozbieżność wiązki fali hydroakustycznej
- ograniczony zakres stosowanej częstotliwości.
22. Schemat budowy echosondy:
- zasilacz
- generator
- układ sterujący
- przetwornik nadawczo-odbiorczy
- wzmacniacz
- wyświetlacz
23. Błędy pomiaru głębokości:
- nachylenie dna
- kołysanie statku
- kształt odbieranego impulsu
- różnica prędkości dźwięku użytej do obliczeń a prędkości rzeczywistej
24. Parametry regulacji Echosond:
- Gain - Wzmocnienie - pozwala obserwować wyraźniej lub eliminować szumy
- TVG - Time Varying Gain - Wzmocnienie zależne od czasu - wzmacnianie ech obiektów znajdujących się w znacznej odległości od statku
- Picture, Image, Scroll Speed - Prędkość przesuwu obrazu
- Transmit Power, Power - Moc w impulsie
- Sensitivity Time Control (STC) - Dostosowanie czasowe czułości - tłumi małe I bliskie zakłucenia.
- Pulse Length, Pulse - Długość Impulsu
- Color Threshold, Color Killing - Eliminacja grup kolorów
- Sound Velocity, Sound Speed - Prędkośc dźwięku w wodzie
- Manual Range - Ustawienie ręczne zakresu pomiarowego
- Auto Range - Automatyczny zakres
- Depth Adjustment, Draft, Draught - Wprowadzenie zanurzenia statku
- Filter, Ping - Filtacja Obrazu
- Heave Sensor Dialog - okno dialogowe przechyłu statku
- Single Beam - pojedyncza wiązka
- double Beam - podwójna wiązka
- Multi Beam - wielowiązkowa
25. Parametry związane z wyświetlaniem echogramów:
- Units Measure, Depth Unit, Units - Ustawienie jednostek głębokości
- Language - język
- Speed, Vessel Speed - Prędkość Statku
- Display Mode - Tryb Wyświetlania
- Navigation mode - Tryb wyświetlania nawigacyjny
- Low/High Frequency - Wysoka/niska częstotliwość
- Dual - Tryb wyświetlania podwójnego
- Expansion - Rozszerzenie - umożliwia zobrazowanie wybranych obszarów
- Bottom Expansion - Rozszerzenie - powiększenie przydenne
- Variable Range Marker - Ruchomy znacznik odległości
- Line Mark, Marker, Event - Linia załącznika
- White Line - Biała Linia
- Digital - Prezentacja aktualnej wartości glębokości
- Arrangement - Rozmieszczenie zobrazowania
26. Alarms:
- Maximum Alarm - Alarm maksymalnej glębokości - Deep Water
- Minimum Alarm - Alarm o niebezpiecznie małym zapasie wody pod stępką
- Lost Bottom - Alarm zaniku odczytu dna
27. Metody transmisji danych w urządzeniach nawigacyjnych:
- RS232 - Recommended Standard - łącze szeregowe przystosowane do pracy asynchronicznej. Funkcjonuje w oparciu o kod ASCII. Maksymalna długość kabla 15m. Obciążenie odbiornika 3-7Kilo-omów
- RS485 - szeregowa transmisja cyfrowa przez dwuprzewodową symetryczną linię transmisyjną do której można podłączyć 32 nadajniki i 32 odbiorniki. Maksymalna długość Kabla 1200m. Obciążenie nadajnika 60 omów.
- Interfejs Ethernet - protokół tcp/ip, Topologia sieci - gwiazda, transfer do 100Mb na sekundę
- NMEA - National Marine Electronics Association - standard wykorzystywany przez większość urządzeń nawigacyjnych
Wyszukiwarka
Podobne podstrony:
Opracowanie na kolokwium, Akademia Morska, I semestr, urządzenia nawigacyjne, Test do Gucmy, Urządze
Elektrotechnika - Notatki do zaliczenia, Akademia Morska, I semestr, elektro, Test wykład
Elektrotechnika - Wstęp do wykładów, Akademia Morska, I semestr, elektro, Test wykład
Elektrotechnika - Notatka odnośnie pytań na zaliczeniu, Akademia Morska, I semestr, elektro, Test wy
Zdefiniowanie pojęcia południka zerowego, Akademia Morska, I semestr, Nawigacja, Wykłady kpt. Ferlac
BiS - wykład 1 sem zaliczenie ściąga, Akademia Morska, I semestr
na TI, Akademia Morska, I semestr, TI wykład test
I ROK- informacja o egzaminie z nawigacji, Akademia Morska, I semestr, Nawigacja
bibek spiral nie dla psa kielbasa, Akademia Morska, semestr 3, Projektowanie i konstrukcja Uządzeń (
wahadlo torsyjne, Akademia Morska, I semestr, FIZYKA, Fizyka - Laboratoria
Pytania na zaliczenie BiSS, Akademia Morska, I semestr, BISS, Audytoria
SPRAWOZDANIE, Akademia Morska, I semestr, Materiały i elementy
1koło20XI2007, Akademia Morska, I semestr, grafika inzynierska, egzaminy
Informacje wstepne dotyczace przedmiotu, Akademia Morska, semestr 3, Elektrodynamika
elektro zaiczenie laborki, Akademia Morska, I semestr, elektro
3koło15I2008, Akademia Morska, I semestr, grafika inzynierska, Grafika inż. egzaminy
1koło29I2009, Akademia Morska, I semestr, grafika inzynierska, egzaminy
więcej podobnych podstron