Politechnika Śląska w Gliwicach
PODSTAWY KONSTRUKCJI MASZYN
Projekt typoszeregu chwytaków
Radosław Ociepka
Grupa 2
Semestr: IV
Kierunek: Automatyka i Robotyka
Wydział: Mechaniczny Technologiczny
spis treści:
założenia i dane do projektu…………………………………………...3
opis istoty działania
dane sytuacyjne
kryteria
zadania do wykonania
rozwiązaznia konstrukcyjne……………………………………………………….…….......5
chwytaki o ruchu imadłowym
chwytaki o ruchu kleszczowym
wybór rozwiazania konstrukcyjnego metoda punktowa……………………………………………………………………...…..7
uszczegółowienie i zunifikowanie rozwiązania konstrukcyjnego…………………………………………………………..…9
obliczenia siły chwytu przedmiotu…………………………………………….……………………..….9
masa przedmiotu
ruch pionowy
ruch obrotowy
dobór PRYZMY…………………………………………….……………….…………...…11
dobór siłownika……………………..………………….……………….…………...…13
charakterystyka przełożenie-przemiesczenie
charakterystyka wysów-przemiesczenie
OBLICZENIA WYTRZYMAŁOŚCIOWE…………………………………….…………………..17
DOBÓR PRZEKROJU RAMIENIA
STRZAŁKA UGIĘCIA PALCA CHWYTNEGO
OBLICZENIE POŁĄCZENIA SWORZNIOWEGO
literatura……………………………………..………………………………..19
załączniki……………………………………………………………………….20
Założenia projektowo - konstrukcyjne
Należało opracować uporządkowaną rodzinę konstrukcji w postaci typoszeregu chwytaków. Podstawowe relacje realizowane przez chwytak to: uchwycenie, trzymanie i uwolnienie, przemieszczenie obiektu. Sposób unieruchomienia obiektu zaś miał być siłowo - kształtowy, za pomocą końcówek chwytnych.
Dane ilościowe:
Obiektami manipulowanymi są przedmioty w postaci walców, których zakresy zmienności wartości dla tworzonego typoszeregu chwytaków są następujące:
rodzaj tworzywa: stal
zakres zmienności średnic: dmin = 35 [mm]
dmax = 90 [mm]
względne rozchylenie: k = ±10 [%]
zakres zmienności długości: Hmin = 100 [mm]
Hmax = 220 [mm]
ciśnienie zasilające: pz = 6 [bar]
maksymalny wysięg robota: R = 1 [m]
maksymalna prędkość obrotowa: 2 [rad/s]
maksymalna prędkość liniowa: Vr = 4 [m/min]
kRYTERIA WYBORU NAJLEPSZEJ KONSTRUKCJI:
K1 - Maksymalna zwartość konstrukcji chwytaka,
K2 - Minimalna masa,
K3 - Minimalna liczba elementów,
K4 - Maksymalna liczba elementów dobranych (katalogowych, znormalizowanych),
K5 - Prostota montażu,
K6 - Prostota montażu chwytaków w kiści robota,
K7 - Zapewnienie prostoliniowości ruchu końcówek chwytnych,
K8 - Stabilna charakterystyka statyczna przemieszczeniowa i siłowa,
K9 - Stałość lub wzrost siły przy wzroście średnicy przemieszczanego obiektu,
K10 - Czas chwytania,
K11 - Możliwość pracy w środowisku wodnym,
K12 - Duża dokładność pozycjonowania,
zadania do wykonania:
Przeprowadzić analizę literaturową oraz internetową
http://www.gemotec.com/
http://www.gimatic.com/
http://www.norgren.com/
http://www.schunk.com/home.html
Opracować pole możliwych rozwiązań chwytaków o ruchu kleszczowym oraz imadłowym
Przeprowadzić optymalizację metodą punktową w zakresie:
układu napędowego
układu przemieszczenia
układu przemieszczenia końcówek chwytnych
Uszczegółowić wybrane rozwiązanie konstrukcyjne
Zunifikować cechy charakterystyczne chwytaka
Opracować wzorcową konstrukcje chwytaka z wyszczególnieniem typowych postaci konstrukcyjnych elementów oraz układów wymiarów
Opracować graf relacji sprzężeń chwytaka
Przedstawić charakterystykę siłową i przemieszczeniową wzorcowej konstrukcji chwytaka
Opracować algorytm a następnie program doboru ilościowych cech konstrukcyjnych dla typowej postaci konstrukcyjnej, z zastosowaniem operatorów: geometrycznych, wytrzymałościowych, elementów dobieranych, procesu wytwórczego, podobieństwa konstrukcyjnego, wymiarów sprzężonych
Wyszczególnić konstrukcje elementów i utworzyć ich rysunki katalogowe
Utworzy założenia wybranego chwytaka
Przeprowadzić symulacje działania chwytaka
2. POLE RozwiązaŃ KONSTRUKCYJNYCH
Chwytaków o ruchu kleszczowym:
Wersja I :
Wersja II :
Wersja III :
Wersja IV :
Chwytaków o ruchu imadłowym:
Wersja I :
Wersja II :
Wersja III :
Wersja IV :
3. KRYTERIALNY Wybór rozwiązania konstrukcyjnego
X |
K1 |
K2 |
K3 |
K4 |
K5 |
K6 |
K7 |
K8 |
K9 |
K10 |
K11 |
K12 |
ၓki |
W1 |
W2 |
W3 |
W4 |
W5 |
W6 |
W7 |
W8 |
Wideal |
K1 |
- |
0,5 |
0 |
0 |
0 |
0,5 |
0 |
0 |
1 |
0 |
0,5 |
0 |
2,5 |
3 |
4 |
2 |
3 |
5 |
4 |
5 |
5 |
5 |
K2 |
0,5 |
- |
0 |
0 |
0 |
0,5 |
1 |
0,5 |
1 |
0 |
0,5 |
0,5 |
4,5 |
4 |
5 |
3 |
3 |
2 |
2 |
3 |
3 |
5 |
K3 |
1 |
1 |
- |
1 |
0,5 |
1 |
1 |
1 |
1 |
1 |
1 |
0,5 |
10 |
3 |
5 |
4 |
2 |
3 |
4 |
4 |
4 |
5 |
K4 |
1 |
1 |
0 |
- |
0,5 |
1 |
0,5 |
1 |
1 |
0 |
1 |
0 |
7 |
4 |
4 |
3 |
3 |
4 |
4 |
4 |
4 |
5 |
K5 |
1 |
1 |
0,5 |
0,5 |
- |
1 |
0,5 |
0,5 |
1 |
0,5 |
0 |
0,5 |
7 |
5 |
5 |
3 |
2 |
3 |
3 |
4 |
3 |
5 |
K6 |
0,5 |
0,5 |
0 |
0 |
0 |
- |
0,5 |
0 |
0,5 |
0 |
0 |
0 |
2 |
4 |
5 |
4 |
3 |
4 |
3 |
3 |
4 |
5 |
K7 |
1 |
0 |
0 |
0,5 |
0,5 |
0,5 |
- |
0,5 |
1 |
0 |
0,5 |
0 |
4,5 |
3 |
3 |
3 |
3 |
4 |
4 |
4 |
4 |
5 |
K8 |
1 |
0,5 |
0 |
0 |
0,5 |
1 |
0,5 |
- |
1 |
0,5 |
1 |
0 |
6 |
3 |
5 |
4 |
3 |
4 |
5 |
5 |
4 |
5 |
K9 |
0 |
0 |
0 |
0 |
0 |
0,5 |
0 |
0 |
- |
0 |
0,5 |
0 |
1 |
2 |
4 |
3 |
2 |
3 |
4 |
4 |
3 |
5 |
K10 |
1 |
1 |
0 |
1 |
0,5 |
1 |
1 |
0,5 |
1 |
- |
1 |
0,5 |
8,5 |
3 |
5 |
4 |
4 |
5 |
5 |
5 |
5 |
5 |
K11 |
0,5 |
0,5 |
0 |
0 |
1 |
1 |
0,5 |
0 |
0,5 |
0 |
- |
0 |
4 |
4 |
5 |
4 |
3 |
2 |
3 |
3 |
2 |
5 |
K12 |
1 |
0,5 |
0,5 |
1 |
0,5 |
1 |
1 |
1 |
1 |
0,5 |
1 |
- |
9 |
3 |
4 |
4 |
5 |
3 |
4 |
5 |
4 |
5 |
ၓKi*Wi |
228,5 |
301,5 |
235 |
206,5 |
231 |
256,5 |
279,5 |
254,5 |
330 |
|||||||||||||
ၓKi*Wi % |
69% |
91% |
71% |
63% |
70% |
78% |
85% |
77% |
100% |
K1 - maksymalna zwartość konstrukcji chwytaka
K2 - minimalna masa
K3 - minimalna liczba elementów
K4 - maksymalna liczba elementów katalogowych lub znormalizowanych
K5 - prostota montażu
K6 - prostota montażu chwytaka w kiści manipulatora
K7 - zapewnienie prostoliniowości ruchu końcówek chwytnych
K8 - stabilną charakterystykę statyczną, przemieszczeniową i siłową
K9 - stałość lub wzrost siły przy wzroście średnicy przemieszczanego obiektu
K10 - cena chwytaka
K11 - możliwość pracy w środowisku toksycznym
K12 - niezawodność pracy w robotogodzinach
Z analizy kryterialnej wynika, że najlepszym rozwiązaniem dla naszych kryteriów jest koncepcja nr 2. Koncepcja ta uzyskała 91% koncepcji idealnej.
Unifikacja cech charakterystycznych chwytaka.
Unifikacja to ograniczenie i porządkowanie wartości cech charakterystycznych.
Jej wynikiem są zunifikowane wartości cech charakterystycznych.
Cechy charakterystyczne chwytaka to:
sposób zamocowania: przyjmuję, że chwytak będzie zamocowany do ramienia robota poprzez kołnierz i śruby.
sposób zasilania: przyjmuję, że chwytak będzie napędzany przez siłownik pneumatyczny dwustronnego działania.
sposób realizacji ruchów końcówek chwytnych: siłownik przez przeguby i sworznie przekazuje siłę do końcówek chwytnych.
siła chwytu: Fch =273N.
rozstaw minimalny i maksymalny końcówek chwytnych:
Rmin =90 mm,
Rmax =242 mm.
ciśnienie zasilania ( p=6 bar = 0,6 MPa)
obliczenie siły chwytu przedmiotu.
masa obiektu MANIPULOWANEGO:
Objętość obiektu:
V =
dmin = 35 [mm]
dmax = 90 [mm]
Hmin = 100 [mm]
Hmax = 220 [mm]
Vmin =Π * (3,5)2 * 10 / 4 = 96, 162 [cm3]
Vmin =Π * 92 * 22 / 4 = 1 400 [cm3]
m = ρ * V ![]()
ρ = 7,8 [g/cm3] - dla stali
mmin = 0,750 [kg]
mmax = 10,920 [kg]
Maksymalna masa obiektu wynosi: mmax = 10,920 [kg]
Minimalna masa obiektu wynosi: mmin = 0,750 [kg]
SIŁA CHWYTU:
Ruch pionowy
Ruch obrotowy
Fch > max(Fch1, Fch2) = 273 [N]
dobranie pryzmy.
W celu uszczegółowienie konstrukcji chwytaka należy dobrać wymiary pryzmy trzymającej dla zmienności średnic. Pozwoli to na obliczenie rozsuwa ramion jak i ich długości.
Chwytak jest przeznaczony do chwytu przedmiotów (wałka)o zmienności średnic od 35 do 90[mm]. Głównym parametrem pryzmy chwytnej jest jej kąt rozwarcia, im kąt jest większy tym pryzma może uchwycić większy zakres średnic.
W projekcie przyjęto kąt rozwarcia pryzmy β=120º
dmin=35[mm]
Luz miedzy szczękami przyjęliśmy lmin=2[mm]
Przyjmujemy wymiar C=6[mm]
Pozostałe wymiary:
przyjmuję wymiar A=20,2[mm]
Uwzględniając luz minimalny obliczam wymiar B z zależności:
![]()
; ![]()
Długość D wyznaczam z zależności:
przyjmuję wymiar D=32[mm]
Wysokość pryzmy wyznaczam z zależności:
![]()
L=26,2[mm]
Obliczam długość końcówki chwytnej (od cięgna do końca pryzmy), która jest ![]()
długości całego ramienia.
![]()
Obliczam długość całego ramienia: ![]()
Przyjmuję wobec tego długość ramienia 160 [mm]
wyznaczenie charakterystyk-dobór siłownika.
xmax=dmax+L
xmin=dmin+L
czyli:
xmin=35+26,2=61,2 [mm]
xmax=90+26,2=116,2 [mm]
Przełożenie siłowe siłowe Fch/Fs chwytaka wynosi:
![]()
Maksymalne wysunięcie siłownika:
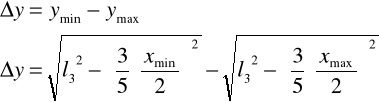
![]()
więc:
Przyjmujemy skok siłownika równy 10 [mm].
Wyliczamy wartość kąta
Największe przełożenie siłowe chwytaka wynosi:
![]()
Wymagane Fs=118,2 [N]
Najmniejsze przełożenie siłowe chwytaka wynosi:
![]()
Wymagane Fs=766,9 [N]
Wymagana siła siłownika to minimum 767 [N].
Charakterystyka przełożenie-przemieszczenie
Charakterystyka wysów-przemieszczenie
Maksymalna siła siłownika:
Dobrano siłownik DNG-32-10-PPV-A firmy Festo o parametrach:
Skok 10 mm
Średnica tłoka 32 mm
Gwintu na tłoczysku M10
Ciśnienie robocze 0,6 - 10 bar
Siła ciągnąca 832 N
obliczenia wytrzymałościowe.
Dobór przekroju ramienia:
Fch=273 N a=0,96 m b=0,48 m c=0,16 m
ΣMA = -RBy·a-Fch·(a+b)=0 ⇒ RBy= -409,5 N
ΣFy = -RA-RBy-Fch=0 ⇒ RA = 682,5 N
Mg1=RA·x1
x1=0 ⇒ Mg1= 0 Nm
x1=a=0,96 m ⇒ Mg1= 655,52 Nm
Mg2=RA·(x2+a)+RBy(x2)
x2=0 ⇒ Mg2= 655,52 Nm
x2=b=0,48 m ⇒ Mg2= 786,2 Nm
Mg3=RA·(x3+a+b)+RBy(x3+b)+0,5Fch(x3)
x3=0 ⇒ Mg3= 786,2 Nm
x3=c=0,16 m ⇒ Mg3= 866,25 Nm
Mgmax= 866,25 Nm
Dobrano minimalny przekrój d = 10 mm.
STRZAŁKA UGIĘCIA PALCA CHWYTNEGO:
Całkowita strzałka ugięcia ramienia chwytaka jest sumą strzałki ugięcia 2 ramion o długości l czyli fc=2∙f.
Ramię wykonane jest z pręta płaskiego(wg. PN-72/H-93202) o wymiarach przekroju 15[mm]x8[mm], długości l =160 [mm], ze stali konstrukcyjnej st4 o module Younga E = 2.1⋅1011 [N / m2] oraz granicy plastyczności Re=250[MPa]
Moment bezwładności oraz wskaźnik wytrzymałości wynosi:
Strzałka ugięcia ramienia wynosi:
Obliczenie połączenia sworzniowego:
Ponieważ sworzeń jest pasowany oblicza się go z warunku na ścinanie. Sworzeń wykonany jest ze stali 45, dla której:
Największą siłą powodującą ścinanie sworznia jest siła dla =59˚33', najbardziej obciążony jest sworzeń łączący ramię (w 3/5 długości) z cięgnem.
![]()
Z warunków wytrzymałościowych otrzymujemy minimalna średnicę sworznia
d ≥ 3,81 [ mm ]
Przyjmuję sworzeń o średnicy 8 [mm] i długości 32 [mm] wg. PN-63/M-83002
ZAŁĄCZNIKI:
RYSUNEK ZŁOŻENIOWY
RYSUNKI WYKONAWCZE
9
xmin,max - max. i min. rozwarcie szczęk
ymin,max -wysunięcie siłownika przy max. i min. rozwarciu szczęk
Fw
Fb
Fods
G
Fb
G
a
T
Fod - siła odśrodkowa
Fch-obr - siła chwytu dla ruchu obrotowego
β
d2 * Π * H
4
A
l1=160 [mm]
l2=3/5 * l1=96 [mm]
l3=60 [mm]
A
a
RBx
RA
B
RBy
Fch
b
c
d
d

![]()
m - ilość śrub (sworzni)
n - ilość płaszczyzn cięcia
i - wsp. Pewności = 0,4
Wyszukiwarka
Podobne podstrony:
KOMPLET chwytak, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, projekt chwytaka
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
Pytania 2, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
PKM pytania-krzych, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
Ściąga PKM(1), Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria, PKM
PODSTAWY KONSTRUKCJI MASZYN sruby, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Te
Pytania, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
PKM - opracowania roznych pytan na egzamin 3, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
PkmPytania, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
Pytania 4, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
pytania z pkm, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
Metody heurystyczne, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
więcej podobnych podstron