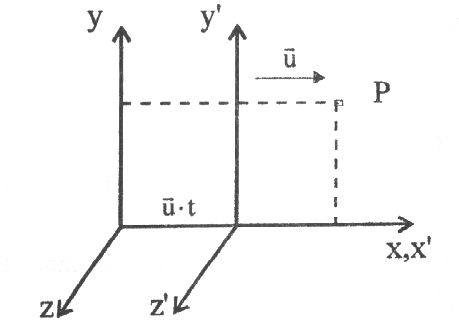
9.Transformacja Lorentza: Weźmy pod uwagę dwa układy inercjalne S i S`, których osie x i x` są do siebie równoległe, a początki O i O` pokrywają się w układzie S ze stałą prędkością v , zwróconą zgodnie ze zwrotem osi x. Gdy pewne zdarzenie zaobserwowane w układzie S ma współrzędne x,y,z,t, to odpowiednie jego współrzędne w układzie S` wynoszą x`,y`,z` ,t`. Układy odniesienia wybieramy w taki sposób, żeby zawsze y` = y i z` = z i tymi współrzędnymi nie będziemy się zajmować. Mamy więc w każdym układzie jedną współrzędną przestrzenną (x lub x`) i jedna współrzędną czasową (t lub t`).
Równanie czoła fali kulistej :
x2+y2+z2=c2t2
x'2+y'2+z'2=c2t'2
stosuję podstawienia
x' = x - v t
y' = y
z' = z
t' = t + f x
c't' - promień kuli
podstawiam wartości i rozwiązuję układ równań , przy czym 2c2f + 2v = 0 ⇒
f = -(v / c2) , współczynnik

x' = γ( x - v t) x = γ( x' +vt')
y' = y y = y'
z' = z z = z'
t' = γ( t - (v/c2)x) t = γ( t'- (v/c2)x')
10Skrócenie długości
mamy dwa układy s i s', mierzymy długość w obydwu układach : l'- długość zmierzona przez obserwatora w ruchomego ,l- opisuje długość jaką zaobserwuje obserwator nie będący w ruchu ,gdzie :
l0 = x2 - x1 , l' = x2' - x1'
l0=x2 - x1= γ(x2'+vt')-γ(x1'+vt') =γ(x2'-x1')
l'=l0/γ = 
ciało obserwowane w ruchu jest „krótsze” od ciała w spoczynku
13.Masa relatywistyczna, energia w teorii względności:
m. = γm0 - masa ciała kiedy się porusza, nie jest równa masie ciała kiedy jest w spoczynku. Zmiana masy jest wynikiem płynięcia czasu w dwóch układach.
Energia relatywistycna:
V - małym: ![]()

m - całkowita masa jest cał. energią zawartą w masie, m0c2 - energia spoczynkowa, 1/2m0V2 - prędkość ruchu, E - energia całkowita, E0 - energia spoczynkowa,

dla E0 = 0, E = p ⋅ c
p = mV = E / c2 V = (p / c) ⋅ V,
V⇒ c - wartość prędkości jest równa wartości c.
15.Oscylator harmoniczny:
Aby zaistniał ruch potrzebna jest siła :
F = -kx (x-wychylenie, k-sprężystość ukł)
m*a = -kx , to a + k/m x =0 , a -przyspie.
Możemy również zapisać :
x(t) = Asin (ωt + f0)
a stąd: ![]()
A - amplituda drgań
ωt +f0 - faza drgań
ω0 - prędkość kołowa , pulsacja , częstość
Oscylator tłumiony :W rzeczywistym oscylatorze w wyniku działania tarcia amplituda drgań maleje stopniowo aż do zera.
F = ma lub -kx - b(dx/dt) =m(d2x/dt2)
-b(dx/dt) - siła tłumiąca, jeżeli b jest mała:
![]()
![]()
lneβT = βT - log. deklement tłumienia
β = r/2m - współczynnik tłumienia
23.Prawo Kulomba: Dwa nieruchome ładunki elektryczne q oraz Q oddziałują na siebie siłą daną wzorem: ![]()
Lub w zapisie wektorowym 
Stała ko zależy tylko od układu jednostek. W układzie SI: k0 = 1 / (4πεoε). Stała: 
Kulomb jest ładunkiem, który na drugi taki sam ładunek działa z odległości 1 [m.] siłą równą 9 ⋅ 109 [N]. Kulomb jest jednostką pochodną ampera. Wartość jednego kulomba ma ładunek elektryczny, przepływający w czasie jednej sekundy przez przewodnik, w którym płynie prąd o natężeniu jednego ampera. Przyjmuje się że siła jest dodatnia dla ładunków równoimiennych, a ujemna dla różnoimiennych. Zakres stosowalności prawa Kulomba rozciąga się od 10-15 [m.]. do kilkudziesięciu lat świetlnych.
26.Pole magnetyczne i jego względność: Dwa równoległe przewodniki, przez które płynie prąd, przyciągają się lub odpychają się. Obserwując zamiast dwóch przewodników strumień swobodnych elektronów w pobliżu przewodnika z prądem, również stwierdzimy odchylenie biegu elektronów po włączeniu prądu. Można więc przyjąć, że w przestrzeni otaczającej przewodnik z prądem znajduje się pole magnetyczne. Pole to opisujemy za pomocą wektora indukcji magnetycznej ![]()
, zdefiniowanego przez siłę elektrodynamiczną działającą na poruszający się ładunek: ![]()
![]()
w próżni ![]()
Pole magnetyczne jest polem bezżródłowym , jest polem wirowym. Nie mam szans na otrzymanie pojedynczego bieguna N lub S .
Cyrkulacja ![]()
27.Równanie Maxwella: Maxwell traktował przestrzeń jako ośrodek materialny - eter. Jeśli w przestrzeni nie ma żadnej dotykalnej materii ,prąd przesunięcia płynie w jakimś ośrodku.
Postać różniczkowa: 
μ0 i ε0 - stałe które charakteryzują własności próżni w sensie magnetycznym ( gdy nie ma materii) 
Są to cztery sprzężone równania różniczkowe cząstkowe .Stosują się one do każdego punktu przestrzeni pola elektromagnetycznego. W próżni gęstość ładunku ρ oraz prądu I równa się zero.
Maxwell jako pierwszy zasugerował, że światło jest falą elektromagnetyczną o określonym zakresie częstotliwości.
2. Prawo Ohma :
Prawo Ohma
Przepływ prądu w przewodniku jest wywołany działaniem pola elektrycznego na nośniki ładunku znajdujące się wewnątrz przewodnika. Jeżeli do końców przewodnika doprowadzimy napięcie U to wytworzone w ten sposób pole elektryczne spowoduje przepływ prądu o natężeniu I.
Iloraz R=U/I nazywamy oporem elektrycznym [
Stosunek napięcia między dwoma punktami przewodnika do natężenia przepływającego przezeń prądu jest wielkością stałą i nie zależy ani od napięcia ani od natężenia prądu. Twierdzenie to nosi nazwę prawa Ohma.
Z powyższego wzoru można napisać, że I=U/R czyli natężenie prądu jest wprost proporcjonalne do przyłożonego napięcia. Prawo Ohma jest ściśle słuszne tylko gdy temperatura = const.
Prawo Ohma stosuje się do wszystkich ciał jednorodnych i izotropowych przy niewielkich napięciach i natężeniach prądu.
Opór danego przewodnika zależy od jego wymiarów i jest on wprost proporcjonalny do długości L oraz odwrotnie proporcjonalny do przekroju poprzecznego S przewodnika.
R= ρL/S
Współczynnik ρ nosi nazwę oporu właściwego. Ze względu na opór właściwy ciała dzieli się umownie na grupy:
- metale będące b. dobrymi przewodnikami
- półprzewodniki
- elektrolity
- izolatory
Odwrotność oporu nazywa się przewodnością, a odwrotność oporu właściwego - przewodnością właściwą. Zatem:
δ=1/ ρ
Ustalimy obecnie związek między natężeniem pola elektrycznego w przewodniku a gęstością prądu. W tym celu zauważamy, że jeżeli przewodnik ma długość L, to przy napięciu U natężenie pola E=U/I
Przy założeniu, że prąd jest rozłożony równomiernie w całym przekroju przewodnika, gęstość prądu w tym przewodniku wynosi:
j=L/S
j=U/RS=EL/RS=E/ρ=δE
(pytanie 46:)
Wzór powyższy j=δE wyrażający proporcjonalność prądu do natężenia pola elektrycznego jest inną postacią prawa Ohma. Nazywamy go różniczkowym prawem Ohma. Wyraża ono lokalne własności przewodnika. Związek zapisujemy często w postaci wektorowej.
Natężenie prądu elektrycznego (wielkość elektryczna)
Natężenie prądu elektrycznego I płynącego przez przewodnik jest wprost proporcjonalne do napięcia U przyłożonego między końcami przewodnika.
I ~ U
Dla danego odcinka obwodu stosunek napięcia mierzonego na jego końcach do natężenia na jego końcach do natężenia prądu przez niego przepływającego ma stałą wartość i nazywa się oporem elektrycznym R.
U
R = --- = const
I
Jednostką oporu elektrycznego jest 1 om (1Ω).
1Ω jest to opór takiego przewodnika, w którym pod napięciem 1V płynie prąd o natężeniu 1A.
Natężenie prądu elektrycznego (wielkość geometryczna)
Opór elektryczny - właściwy - jest równy oporowi przewodnika o długości 1m i polu przekroju poprzecznego 1 m2.
Na opór wpływa ma również temperatura. Opór przewodnika rośnie wraz ze wzrostem temperatury.
3) Siły bezwładności :
Inercjalne układy odniesienia:
Układ odniesienia , w którym obowiązują zasady dynamiki Newtona, nazywamy układem inercjalnym.
Według I zasady dynamiki Newtona układ inercjalny wyróżnia się tym, że ciało nie poddane działaniu sił spoczywa lub porusza się jednostajni prostoliniowo względem tego układu. Doświadczenia wykazują, że układ odniesienia związany z Ziemią jest w bardzo dobrym przybliżeniu układem inercjalnym. Jednak ruch obrotowy Ziemi wokół własnej osi wpływa w niewielkim stopniu na przebieg zjawisk mechanicznych (dowód wahadło puszczone w ruch poziomy). Dokładniejszym układem inercjalnym jest układ związany z gwiazdami.
Każdy układ poruszający się względem układu inercjalnego ruchem jednostajnym i prostoliniowym jest też układem inercjalnym.
Układy nieinercjalne:
Przypuśćmy, że obserwujemy ruch punktu materialnego P w pewnym inercjalnym układzie odniesienia, który oznaczmy przez O. Rozważany punkt znajduje się pod działaniem innych sił materialnych, więc porusza się ruchem jednostajnym (F=m*a) Weżmy teraz pod uwagę drugi układ odniesienia O' , poruszający się względem układu O w kierunkuosi x ruchem dowolnym.
Na podstawie rysunku widzimy , że x'(t) = x(t) - xo(t), po dwukrotnym zróżniczkowaniu otrzymujemy:
a' = a - ao
Z powyższego związku widać, że przyspieszenie w układzie O' , nie jest równe przyspieszeniu w układzie O. Równość taka zachodzi tylko dla ao=0 , a więc gdy przyspieszenie układu O' względem O jest równe zeru, gdy układ O' jest układem inercjalnym. Jeżeli zaś ![]()
to układ O' nazywamy układem nieinercjalnym, a przyspieszenie ao - przyspieszeniem unoszenia.
W układzie O' nie obowiązuje I zasada dynamiki: punkt materialny nie spoczywa , lecz porusz sie z przyspieszeniem a' = - ao. Układ ten nie jest układem inercjalnym i nie działa w nim także II zasada dynamiki: iloczyn masy i przyspieszenia nie jest równy sile działającej na masę, lecz równy jest sile mnius wyrażenie m*ao.
Zdefiniujemy teraz siłę bezwładności Fb jako iloczyn masy i przyspieszenia unoszenia ze znakiem minus:
Fb = - m*ao
Siłę bezwładności nazywa się siłą pozorną, gdyż jej istnienie zależy od wyboru nieinercjalnego układu odniesienia.
W obracającym się układzie odniesienia występuje siła bezwładności, zwana odśrodkową siłą bezwładności.
Fod = m*ω2*r
Siła bezwładności
Prawa Newtona są spełnione tylko w inercjalnych układach odniesienia. Przyspieszenie ciała w jest takie samo we wszystkich inercjalnych układach odniesienia. Każdy układ nieinercjalny porusza się względem układów inercjalnych z pewnym przyspieszeniem, dlatego przyspieszenie w' w nieinercjalnym układzie odniesienia różni się od przyspieszenia w w układzie inercjalnym. Różnicę przyspieszeń ciała w układach inercjalnym i nieinercjalnym oznaczmy symbolem a: w-w' = a.
Jeżeli ruch układu nieinercjalnego względem inercjalnego jest ruchem postępowym, to wektor a jest taki sam dla wszystkich punktów przestrzeni — jest to po prostu wektor przyspieszenia nieinercjalnego układu odniesienia. Jeżeli układ nieinercjalny wiruje, to wektor a jest różny w różnych punktach przestrzeni (a = a (r'), gdzie r' jest wektorem położenia punktu względem nieinercjalnego układu odniesienia).
Załóżmy, że wypadkowa wszystkich sił, których źródłem są inne ciała, wynosi F. Zgodnie z drugim prawem dynamiki, przyspieszenie ciała względem dowolnego układu inercjalnego jest równe ![]()
Natomiast przyspieszenie ciała względem pewnego układu nieinercjalnego, można przedstawić w postaci ![]()
Stąd wynika, że nawet przy F = O ciało porusza się względem układu nieinercjalnego z przyspieszeniem -a, czyli tak, jakby na niego działała siła — m a. Z powyższego wynika, że do opisu ruchu w nieinercjalnych układach odniesienia można posługiwać się równaniami Newtona, o ile — niezależnie od sił, których źródłami są inne ciała — wprowadzi się tzw. silę bezwładności Fb, równą iloczynowi masy ciała przez różnicę przyspieszeń a, wziętą ze znakiem minus: Fb = -m(w-w') = -ma
Zapis drugiego prawa Newtona w nieinercjalnym układzie odniesienia ma następującą postać: mw'=F.+Fb.
Odśrodkowa siła bezwładności
Siły bezwładności Fbo=mω2R, które pojawiają się w wirujących (względem układów inercjalnych) układach odniesienia, nazywamy odśrodkowymi siłami bezwładności. Taka siła „działa" na ciało w wirującym układzie odniesienia, niezależnie od tego, czy ciało to spoczywa w tym układzie, czy porusza sig względem tego układu z prędkością v'.
Jeżeli położenie ciała w obracającym się układzie odniesienia jest scharakteryzowane wektorem położenia r', to odśrodkową siłę bezwładności można przedstawić w postaci podwójnego iloczynu wektorowego: Fbo=m.[ω,[r',ω]]
Siła Coriolisa
Jeżeli ciało porusza się względem wirującego układu odniesienia(rys a), to — oprócz odśrodkowej siły bezwładności — pojawia się jeszcze jedna siła, zwana silą Coriolisa lub silą bezwładności Coriolisa. W wirującym układzie odniesienia cząstka zachowuje się tak, jakby — oprócz skierowanej do środka okręgu siły F — działały na nią jeszcze dwie siły: Fbo = mω2 R i Fc, której wartość wynosi 2mv'ω. Łatwo jest przekonać się, że siłę Fc można przedstawić w postaci Fc = 2m [v'<a].
Siła ta jest właśnie siłą bezwładności Coriolisa. Jeżeli v' = O, to siła Coriolisa jest równa zeru. Natomiast siła f|», nie zależy od v' — działa ona zarówno na spoczywające, jak i poruszające się cząstki. Dla przypadku przedstawionego na rysunku b mamy ![]()
A następnie ![]()
Siła Coriolisa jest siłą bezwładności działającą na ciało poruszające się ruchem postępowym w obracającym się układzie odniesienia. Wyraża się ona wzorem:
Fc = 2*m*v*x*ω
Gdzie ω oznacza prędkość kątową, z jaką obraca się układ odniesienia, a v-prędkość ruchu ciała w tym układzie. Z postaci powyższego wzoru widać, że siła Coriolisa jest równa zeru tylko wtedy, gdy ciało porusza się równolegle do osi obrotu.
W skutek obrotu Ziemi wokół własnej osi w zjawiskach zachodzących na Ziemi występuje siła Coriolisa. Na przykład rzeki płynące na półkuli północnej podmywają prawy brzeg bardziej, niezależnie od kierunku w którym płyną. Siła Coriolisa powoduje także odchylenie toru pocisku w prawo od kierunku, w jakim został wystrzelony. Równiż swobodnie spuszczone ciało odchyla się nieco do pionu pod działaniem tej siły.
19. Zasada zachowania momentu pędu.
Stosunek zmiany całkowitego momentu pędu układu punktów materialnych względem punktu związanego z inercjalnym układem odniesienia (albo względem środka masy) do czasu, w którym ta zmiana nastąpiła jest równy sumie momentów sił zewnętrznych działających na ten układ, tzn: ၴzew=dL/dt. Przypuśćmy teraz, że suma momentów sił zewnętrznych ၴzew =0; znaczy to, że dL/dt=0, zatem L jest wektorem stałym. Jeśli wypadkowy moment sił zewnętrznych działających na układ wynosi zero. Całkowity moment pędu pozostaje stały. Dla układu n punktów materialnych całkowity moment pędu względem pewnego punktu wynosi L=l1+l2+...ln. Jeśli wypadkowy moment sił zewnętrznych działających na układ wynosi zero, to L=const=L0, gdzie L0 jest stałym wektorem całkowitego momentu pędu. Momenty pędu poszczególnych punktów materialnych mogą się zmieniać, lecz ich suma wektorowa L0 pozostaje stała gdyż wypadkowy moment sił zewnętrznych równa się zeru.
Przykład.
Jeśli układem punktów materialnych jest ciało sztywne obracające się wokół pewnej osi (np. osi z), która jest nieruchoma w inercjalnym układzie odniesienia, to możemy zapisać że LZ=Iთၷ, gdzie LZ jest składową momentu pędu wzdłuż osi obrotu, a I jest momentem bezwładności układu względem tej samej osi. Gdy skoczek odbija się od trampoliny z wyciągniętymi nogami i rękoma posiada pewną początkową prędkość kątową. Ponieważ w powietrzu nie występują momenty sił zewnętrznych, jego moment pędu L=I*omega jest stały. Gdy skoczek podkurczy nogi i ręce, zmaleje, ale odpowiednio wzrośnie ၷ. Moment pędu nie ulegnie zmianie L=Iთၷ=I0თၷ0=const.
37. Prawo Gaussa dla elektrostatyki i jego konsekwencje (pokazać jak z prawa Gaussa wynika prawo Coulomba).
Twierdzenie Gaussa - całkowity strumień Φ wektora indukcji elektrycznej D przez powierzchnię zamkniętą S o dowolnym kształcie jest wprost proporcjonalny do sumy algebraicznej swobodnych ład. Elektrycznych zawartych wewnątrz tej powierzchni i nie zależy od ładunków rozmieszczonych na zewnątrz niej.
Φ = ∑k=1n qk gdzie q1, q2, .. to ładunki zawarte wewnątrz powierzchni.
Uwzględniając wyrażenie na całkowity strumień indukcji elektrycznej, twierdzenie to można zapisać:
Φ = ƒƒs Dn ds = Q / (ρ e)
gdzie: Q - ładunek całkowity wewnątrz zamkniętej powierzchni S.
Dla pola magnetycznego: strumień wektora indukcji magnetycznej przez dowolną powierzchnię zamkniętą jest równy zeru
Φ = ƒƒs B ds = 0
ładunki leżące na zwenątrz nie mają wpływu na wartość E jeżeli rozkład ładunków jest odp. symetryczny, iż prez odpowiedni dobór powierzchni Gaussa da się wyznaczyć całkę ΦE=ƒEdS. Prawo gaussa może być stosowane do obliczania ładunku znajdującego się wewnątrz powierzchni.
Jak wynika prawo Columba
ε0∫Eds=q
ε0E∫ds=q
ε0E(4πr2)=q
E=1/4πr2ε0*q/r2, ale E=F/q0 --> F=1/1/4πr2ε0*qq0/r2 - prawo Coulomba
52. Zjawisko indukcji i samoindukcji elektromagnetycznej.
Indukcja elektromagnetyczna - zjawisko powstawania w obwodzie elektrycznym siły elektromagnetycznej indukcji i w wyniku zmian w czasie strumienia magnetycznego obejmowanego przez ten obwód (prawo Faraday'a)
δ ƒ δ (δΦ (δ ƒƒƒσ ∂ ∂
Gdy obwód jest zamknięty, zaczyna w nim płynąć prąd elektryczny zwany prądem indukowanym. W praktyce można uzyskać prąd indukowany w następujących przypadkach:
gdy obwód zamknięty porusza się w polu magnetycznym magnesu w ten sposób, że przecina linie sił pola magnetycznego;
gdy obwód jest nieruchomy, a porusza się magnes (zależy to więc jedynie od ruchu względnego między obwodem, a magnesem);
gdy zamiast magnesu zostanie użyta cewka z prądem, która wytwarza pole magnetyczne;
gdy w poprzednim przypadku obwody pozostają nieruchome, ale w cewce zmienia się natężenie prądu;
Kierunek powstającego prądu indukowanego określony jest przez regułę Lenza (kierunek prądu indukowanego jest taki, że wytworzone przez niego pole magnetyczne przeciwstawia się przyczynie, która go wywołała).
Samoindukcja - szczególny przypadek indukcji elektromagnetycznej, zjawisko powstawania siły elektromotorycznej (SEM) w obwodzie zamkniętym w wyniku zmian strumienia indukcji magnetycznej wytwarzanego przez zmienny prąd elektryczny płynący przez ten obwód. Wielkość SEM wynosi
σ
, gdzie - szybkość zmian natężenia prądu w obwodzie
L - współczynnik samoindukcji
17. Moment bezwładności bryły sztywnej
ciało sztywne - układ punktów materialnych, które zajmują zawsze te same położenie względme siebie.
Weźmy pod uwagę ciało sztywne obracające się z prędkością kątową ω dokoła osi, które jest nieruchome w wybranym układzie inercjalnym. Każdy punkt tego ciała ma energię kinetyczną. Punkt materialny o masie m i odległości r od osie obrotu i ma prędkość liniową v=ωr. Jegeo energia kinetyczna wynosi zatem mv2/2=mr2ω2/2 całkowita energia kinetyczna ciała jest sumą energii kinetycznych wszystkich jego punktów. Dla ciała sztywnego ω jest stałe dla wszystkich punktów materialnych. Promień r może być różny dla róznych punktów. Stąd całkowita energia kinetyczna K obracającego sie ciała wyraża się jako K=1/2(m1r12+...)ω2=1/2(Σmiri2) ω2. Czynnik (Σmiri2) hest sumą iloczynów mas cząstek przez kwadraty ich odległości od osi obrotu. Oznaczając tę wielkość przez I nazywamy momentem bezwładności ciała względem wybranej osi.
ciągły rozkład masy - dla ciała sztywnego, które nie składa się oddzielnym mas punktowych, lecz ma ciągły rozkład masy, wyrażenie określające moment bezwładności jest bardziej złożone. Proces sumowania we wzorze I=(Σmiri2) zastępujemy procesem całkowania. rozważmy ciało podzielone na nieskończenie małe elementy o masach dm. Niech r oznacza odległość każdego elementu od osi obrotu. Wówczas moment bezwładności otrzymujemy z wyrażenia I=∫r2dm, gdzie całkowanie odbywa się po całej objętości ciała.
60. Prawo ampera dla elektromagnetyzmu. Prawo Biota - Savarta
Prawo ampera - krążenie wektora natężenia pola magnetycznego po dowolnej krzywej zamkniętej jest równe algebraicznej sumie natężeń prądów przepływających przez powierzchnię rozpiętą na tej krzywej.
Prawo ampera - prawo przedstawiające zależność wartości cyrkulacji (całki okrężnej) wektora natężenia pola magnetycznego H od wartości natężeń stałych prądów elektrycznych płynących przez powierzchnię objętą cyrkulacją; cyrkulacja wektora natężenia pola magnetycznego, wytworzonego przez stały prąd elektryczny, wzdłuż linii zamkniętej L obejmującej prąd jest równa sumie algebraicznej natężeń Ik prądów obejmowanych przez tę linię
ƒL Hdl = ∑k=1n Ik
Prawo ampera - względną wartość indukcji B dla różnych odległości n i przy róznych natężeniach i możemy wyznaczyć, dowodząc doświadczalnie, że B=i/r. Proporcjonalność tę możemy zamienić na równość wprowadzając stałą wówczas μ0/2π, gdzie μ0 - przenikalność magnetyczna. wówczas B=μ0i/2πr albo 2Bπr=μ0i. Lews strona ostatniego równania jest równe ∫Bdl po obwodzie koła o promieniu r, w które środku umieszczono drut. We wszystkich punktach tego koła B ma tę samą (stałą) wartość bezwzględną B, a dl -styczne do drogi całkowania ma ten sam kierunek co B. Wobec tego ∫Bdl=B∫dl=2Bπr, gdzie ∫dl jest obwodem koła. A więc w tym szczególnym przypadku możemy zapisać związek pomiędzy polem magnetycznym i prądem jako ∫Bdl=μ0i - co stanowi prawo Ampera.
Ampera reguła (reguła pływaka) - reguła określająca zależność między kierunkiem pola magnetycznego, a kierunkiem prądu elektrycznego wytwarzającego to pole: człowiek płynący wzdłuż przewodnika w kierunku prądu elektrycznego i zwrócony twarzą do igły magnetycznej umieszczonej pod przewodnikiem widzi północny biegun tej igły odchylony na lewo.
Prawo Biota - Savarta (jednostki)
Prawo Ampera można stosować do znajdowania pola magnetycznego tylko wtedy, gdy rozkład prądów jest na tyle symetryczny, że pozwala na łatwe obliczenie całki krzywoliniowej ∫Bdl. Podobnie prawo Gaussa stosuje się w elektrostatyce do znajdowania pół elektrostatycznych wówczas tylko, jesli rozkład ładunku ma na tyle wysoką symetrię, że łatwo jest policzyć całką powierzchniową ∫Eds
Chcąc znaleźć idnukcję dB pola magnetycznego wytworzonego przez element prądu w pnkcie P. Zgodnie z prawem Biota-Savarta dB=μ0i/4π * dl sinθ/r2, gdzie r jest promieniem wodzacym, poprowadzonym od elementu prądu do punktu P, a θ kąt zawarty między r i dl. Zapisując to w postaci wektorowej otrzymamy dB==μ0i/4π * (dl x r)/r3 gdzie
Prawo określające wielkość i kierunek wektora indukcji magnetycznej w dowolnym punkcie pola magnetycznego wytwarzanego przez prąd elektryczny, pozwalające znaleźć rozkład pola magnetycznego wytworzonego przez dowolny układ przewodników z prądem. Zgodnie z tym prawem, odcinek przewodnika , wzdłuż którego płynie prąd o natężeniu I, wytwarza w danym punkcie M przestrzeni, pole magnetyczne o indukcji magnetycznej
dB = [(μ0 * μr * I)/4π]*[(dl * sin α)/r2]
B = [(μ0 * μr * I)/4π]*ƒ[(dl * r)/r3]
φHdl = I
H = [(μr * I)/4π]*ƒ[(dl * r)/r3]
11)Równanie ruchu dla bryły obrotowej
Gdy na bryłę działa niezrównoważony moment siły M , wtedy nadaje on tej bryle przyspieszenie kątowe , którego wartość jest proporcjonalna do wartości momentu siły![]()
, gdzie I- moment bezwładności bryły. ![]()
, ![]()
Prawo powszechnego ciążenia
Wszystkie ciała obdarzone masą przyciągają się wzajemnie siłami grawitacji. Wartość siły wzajemnego przyciągania się dwu ciał jest wprost proporcjonalna do iloczynu ich mas i odwrotnie proporcjonalna do kwadratu odległości między ich środkami. Wektor siły grawitacji leży na prostej przechodzącej przez środki obu mas.
Zjawisko indukcji elektromagnetycznej
Zjawiskiem indukcji elektromagnetycznej nazywamy zjawisko powstawania prądu w zamkniętym obwodzie pod wpływem zmian strumienia indukcji magnetycznej. Powstający prąd nazywamy prądem indukcyjnym. Może on zostać wzbudzony w zamkniętym obwodzie wtedy gdy zmienia się strumień indukcji pola magnetycznego obejmowany przez obwód.
Prędkość, przyspieszenie
W dowolnym ruchu prędkość jest definiowana wzorem v=r/t. Rozróżniamy chwilowe, średnie. Przyspieszenie jest wielkością wektorową charakteryzującą zmiany prędkości w ciągu jednostki czasu. Rozróżniamy średnie i chwilowe. aśr=v/t
Układ nieinercjalny, zasady dynamiki
Układem nieinercjalnym nazywa się taki układ w którym nie jest spełniona pierwsza zasada dynamiki - jest nim każdy układ poruszający się z przyśpieszeniem, np. układ związany z hamującym lub przyśpieszającym pojazdem, z pojazdem na zakręcie.
I zasada dynamiki - jeżeli na ciało nie działa żadna siła lub gdy siły działające na nie równoważą się to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym po linii prostej.
II zasada dynamiki - jeżeli na ciało działa stała niezrównoważona siła (wypadkowe wszystkich sił działających na nie jest różna od zera) to ciało to porusza się ruchem jednostajnie zmiennym z przyśpieszeniem wprost proporcjonalnym do działającej siły i odwrotnie proporcjonalnym do masy tego ciała (kierunek i zwrot przyśpieszenia jest zgodny z kierunkiem i zwrotem wypadkowej siły)
III zasada dynamiki - jeżeli ciało A działa na ciało B siłą FAB (siła akcji) to ciało B oddziałuje na ciało A siłą FBA (siłą reakcji) która ma taką samą wartość , taki sam kierunek i przeciwny zwrot. Siły te przyłożone są do różnych ciał ( czyli nie równoważą się)
RUCH - zmiana położenia obiektu materialnego względem pewnego punktu odniesienia; opis ruchu abstrahujący od działających sił stanowi przedmiot kinematyki, dynamika bada związek ruchu z działającymi siłami.
R. JEDNOSTAJNY - ruch, w którym stała jest bezwzględna wartość przyspieszenia, czyli przyspieszenie styczne (at) i dośrodkowe (an) jest równe zeru; wzory: s=υt υ=const at=an=0
R. JEDNOSTAJNIE PRZYSPIESZONY - ruch, w którym przyspieszenie styczne ma stałą wartość; wzory: ![]()
![]()
gdzie υ(t)-pr. jako funkcja czasu, υ0 -pr. początkowa, at -przyspieszenie styczne at≠0=const an=0 υ - zmienne; ruch, w którym at<0 nazywamy ruchem jednostajnie opóźnionym
MOMENT PĘDU (KRĘTU)
Momentem pędu „L” punktu materialnego o masie „m” i wektorze wodzącym „r” od tego punktu definiujemy wzorem L = r x mv (co można zapisać ![]()
)
Moment pędu bryły jest sumą momentów pędu wszystkich jej punktów, czyli ![]()
albo L=ILo
Moment pędu bryły równa się iloczynowi jej prędkości kątowej „ω” i momentu bezwładności „I”.
Posługując się pojęciem momentu pędu można II zasadą dynamiki ruchu obrotowego można wyrazić następująco : Pochodna momentu pędu „L” bryły względem czasu „t” jest równa momentowi siły „M” działającej na tę bryłę.
Mamy : ![]()
![]()
P.S. II zasada dynamiki:
Moment siły działającej na bryłę jest równy iloczynowi momentu bezwładności „I” tej bryły i jej przyspieszenia kątowego „α”. M. = Iα
Natomiast: Moment bezwładności I bryły względem dowolnej osi jest równy sumie momentu bezwładności „I0” względem osi równoległej przechodzącej przez środek masy bryły oraz iloczyn masy tej bryły i kwadratu odległości obu osi, czyli I=I0+mα2
13. Równanie ruchu dla bryły obrotowej
Wyobraźmy sobie ciało sztywne, obracające się dookoła stałej osi, na przykład koło rozpędowe jakiejś maszyny. Ciało to podzielmy w myśli na bardzo wiele elementów i weźmy pod uwagę jeden taki element, na przykład k-ty. Niech jego masa wynosi mk, zaś prędkość liniowa w pewnej chwili, uznanej za początkową, niech wynosi v0k. Na element ten działają na ogół rozmaite siły, a więc siła zewnętrzna oraz siły wewnętrzne, w tym siłę dośrodkową.
Siła zewnętrzna Fk, jeśli nie leży w płaszczyźnie rysunku, to jest w płaszczyźnie prostopadłej do osi, ma jakąś składową wzdłuż osi, która na ruch nie ma żadnego wpływu, oraz składową F'k, leżącą w płaszczyźnie ruchu. Składowa F'k da się przedstawić w postaci dwóch składowych: jednej F'ksin k, prostopadłej do promienia r i drugiej F'kcos k skierowanej wzdłuż promienia. Ta druga, nie mając momentu względem osi O, nie ma na ruch najmnejszego wpływu. Tylko składowa F'ksin k, styczna do toru, wywołuje ruch ciała. Siła F'ksin k może zwiększyć lub zmniejszyć prędkość elementu, zależnie od tego, czy działa w kierunku ruchu, czy przeciwnie.
Siły wewnętrzne działają między sąsiednimi elementami ciała; one to sprawiają, że elementy trzymają się razem, tworząc sztywną bryłę; są to siły spójności. Na przykład na powierzchni zetknięcia się pewnego elementu, k-tego, z elementem (k+1)-ym działa siła spójności, wywierana na element k przez k+1 i równa jej, lecz przeciwnie skierowana, siła wywierana na element k+1 przez k. Siły te wytwarzają równe, przeciwnie skierowane momenty, które znoszą się wzajemnie parami. Dlatego nie mogą nic zmienić w ruchu obrotowym bryły.
Siła dośrodkowa, będąc skierowana wzdłuż promienia, ma moment równy zeru, nie może więc ani zwiększyć, ani zmniejszyć prędkości kątowej bryły.
Zatem tylko siła zewnętrzna Fk może zmienić ruch ciała (a więc go wywołać, przyspieszyć, zwolnić itp.) i to tylko pod warunkiem, że jej moment względem osi O, czyli moment siły F'k względem punktu O, M=r F'k, nie jest równy zero. Jeśli więc na bryłę nie działa żaden moment sił zewnętrznych, to elementy tej bryły będą się poruszać z prędkością v, stałą co do swej wartości skalarnej. Kierunek prędkości v zmieniać się będzie pod wpływem siły dośrodkowej, ale pozostawać ona będzie zawsze w tej samej płaszczyźnie; bez działania specjalnej siły zewnętrznej wektor v nie wyjdzie ze swej dawnej płaszczyzny. Innymi słowy: wektor prędkości kątowej zachowuje stałą wielkość i stały kierunek w przestrzeni. Prawdę powyższą sformułujemy w postaci analogicznej do I zasady Newtona: jeśli na bryłę sztywną nie działa żaden moment zewnętrzny, to prędkość kątowa bryły jest stała, zarówno co do wielkości jak i kierunku. Jeśli oś bryły obracającej się nie jest osadzona w łożyskach, lecz jest osią swobodną, jak np. oś kuli ziemskiej, to przy braku momentu zewnętrznego oś ta zachowuje stały kierunek w przestrzeni.
Rozważmy teraz przypadek, gdy na element mk bryły działa siła F'k mająca składową F'ksin k prostopadła do promienia rk.
Niechaj prędkość liniowa elementu mk, która w chwili t=0 wynosiła v0k, zwiększy się pod wpływem siły F'k, działającej w ciągu krótkiego czasu t, do wartości vk. Twierdzenie o popędzie i pędzie powiada, że popęd F'ksin k t równy jest przyrostowi pędu m k v k - m k v 0k:
F'ksin kt= mkv k - m k v 0k
Pomnóżmy obie strony tego równania przez promień wodzący tego elementu rk, uwzględnijmy vk=rk i v0k=r0k0, gdzie i 0 są prędkościami kątowymi elementu po czasie t oraz w chwili początkowej. Mamy więc:
rkF'ksin kt=rk2mk(-0)
Dla wszystkich elementów bryły będzie:
(krkF'ksin kt=(krk2mk)(-0), (*)
które opisuje ruch obrotowy bryły.
Dla zwięzłości wprowadzamy:
1. Suma momentów sił zewnętrznych względem osi obrotu:
M= krkF'ksin k
2. Mt - moment pędu udzielonego bryle.
3. sumę , rozciągniętą na wszystkie elementy bryły nazywać będziemy momentem bezwładności bryły względem osi O:
I= krk2mk
4. Iloczyn I nazywać będziemy momentem pędu (krętem) bryły; w równaniu * I jest momentem pędu po czasie t, zaś I0 jest momentem pędu początkowym; I(-0)=I-I0 jest przyrostem momentu pędu w czasie t.
Po zastosowaniu powyższych:
Mt=I-I0
Jest to równanie ruchu obrotowego bryły dookoła stałej osi.
Moment pędu, udzielony bryle mogącej poruszać się dookoła osi, równy jest przyrostowi momentu pędu tej bryły.
Jeśli powyższe równanie zapiszemy:
M=I(-0)/t
To zauważymy, że zawiera ono średnie przyspieszenie (-0)/ t=w/t, które dla t→0 przechodzi w przyspieszenie kątowe prawdziwe albo chwilowe:
γlim(t→0) w/t=d/dt
Wobec tego równanie ruchu obrotowego bryły sztywnej przybierze postać następującą:
M=I d/dt
albo
M=Iγ
W tej postaci przypomina równanie ruchu postępowego:
F=ma
Jak widzimy, rolę siły przejmuje moment sił, masy - moment bezwładności, zaś przyspieszenia liniowego - kątowe.
Przyspieszenie kątowe bryły jest proporcjonalne do momentu sił przyłożonych i odwrotnie proporcjonalne do momentu bezwładności bryły.
15. JAKA JEST RÓŻNICA POMIĘDZY UKŁADEM ODNIESIENIA INERCJALNYM I NIEINERCJALNYM
Pierwsze prawo Newtona formułuje się następująco: każde ciało znajduje się w stanie spoczynku lub mchu jednostajnego prostoliniowego, dopóki działanie ze strony innych ciał nie zmieni tego stanu. Dwa wymienione stany mają wspólną cechę: przyspieszenie ciała jest równe zeru. Pozwala to inaczej sformułować pierwsze prawo dynamiki: prędkość dowolnego ciała pozostaje stała (w szczególności równa zeru), dopóki oddziaływanie ze strony innych ciał jej nie zmieni.
Pierwsze prawo Newtona nie jest spełnione we wszystkich układach odniesienia. Wiemy, że charakter ruchu zależy od układu odniesienia. Rozważmy dwa układy odniesienia, poruszające się względem siebie z pewnym przyspieszeniem. Jeżeli względem jednego z tych układów ciało spoczywa, to względem drugiego, oczywiście, ciało to porusza się z przyspieszeniem. Widzimy, że pierwsze prawo dynamiki nie może być spełnione we wszystkich układach.
Układ odniesienia, w którym jest słuszne pierwsze prawo Newtona, nazywamy inercjalnym. Samo prawo nazywa się niekiedy prawem bezwładności (inercji). Układ odniesienia, w którym pierwsze prawo Newtona nie jest spełnione, nazywamy nieinercjalnym. Istnieje nieskończenie wiele układów inercjalnych. Każdy układ odniesienia, który porusza się względem danego układu inercjalnego ruchem jednostajnym po linii prostej, jest także układem inercjalnym.
O polu elektrycznym możemy powiedzieć, że jest silne albo słabe w zależności od tego, czy wywołuje indukcję silną, czy słabą. Co to jednak znaczy indukcja silna lub słaba? Miarą indukcji jest stosunek ładunku indukowanego na powierzchni bardzo małej płytki próbnej, umieszczonej w danym punkcie pola prostopadle do linii sił, do wielkości jej powierzchni. Jeżeli indukowany, czyli „przesunięty” ładunek oznaczymy literą q, powierzchnię płytki (jednostronną) - literą S, to w myśl powyższej definicji indukcja, czyli przesunięcie D, wyrazi się wzorem:
![]()
(2.9)
W danym punkcie pola elektrycznego umieszczamy dwie płytki próbne zetknięte ze sobą powierzchniami. Płytki te rozdzielamy, a następnie ładunek q zebrany na jednej z nich (obojętnie na której) przenosimy do kuli wydrążonej elektrometru. Cały ładunek q zostanie oddany elektrometrowi. Niech elektrometr da wychylenie wskazujące U woltów. Ale elektrometr jest swego rodzaju kondensatorem mającym pewną pojemność C; skoro naładował się do napięcia U, to jego ładunek wynosi
q=CU
Znając C i odczytawszy U obliczamy q. Wreszcie ze wzoru (2.9) otrzymujemy D. Jednostką zasadniczą indukcji jest ![]()
.
Indukcja jako przesunięcie elektronów, jest wielkością kierunkową, czyli wektorem. Kierunek wektora D jest identyczny z kierunkiem linii sił w danym punkcie pola.
Opisany wyżej pomiar możemy wykonać w dowolnym punkcie pola elektrycznego. Można go również wykonać na samej powierzchni przewodnika naelektryzowanego P. Wówczas stosowanie dwóch płytek byłoby zbyteczne. W tym przypadku stosunek ![]()
nazywamy gęstością naelektryzowania przewodnika i oznaczamy literą σ. Analogicznie do (2.9) mamy więc
![]()
(2.9a)
Przy pomocy tego rodzaju pomiarów z łatwością stwierdzamy, że w polu jednorodnym, np. pomiędzy płytkami kondensatora płaskiego:
indukcja elektryczna D jest we wszystkich punktach pola ta sama, byle punkty te nie wychodziły poza obręb jednorodności pola;
gęstość naelektryzowania równa się indukcji: σ = D oraz ma tę samą wartość we wszystkich punktach obu powierzchni płyt zwróconych ku sobie, z wyjątkiem najbliższych okolic brzegów, gdzie σ i D są większe.
Doświadczenia wykonane w polu niejednorodnym, np. w polu otaczającym kulę naelektryzowaną przekonują nas, że indukcja D jest większa w tych miejscach pola, gdzie linie sił zagęszczają się, natomiast mniejsza tam, gdzie linie sił rozrzedzają się.
52,53 Fale elektromagnetyczne i ich własności, zjawisko indukcji elektromagnetycznej
Obwodem LC nazywamy obwód zawierający kondensator o pojemności C i cewkę o indukcyjności L, o oporze elektrycznym równym zero. W obwodzie LC można pobudzić drgania elektryczne, które wykazują ścisłą analogię do drgań mechanicznych.
W rzeczywistości każdu\y obwód posiada mniejszy lub większy opór R. Jego obecność powoduje w każdym cyklu wydzielanie się w obwodzie pewnej ilości ciepła Joule'a, energia obwodu maleje i drgania zanikają. Otrzymujemy w ten sposób drgania swobodne tłumione.
Współczynnik tłumienia =R/2L
W obwodzie zawierającym opór (RLC) można uzyskać drgania niezanikające, nazywane drganiami wymuszonymi, jeżeli w obwód włączymy zmienną SEM (indukcyjną siłę elektromotoryczną) Drgania wymuszone można także wywołać bez włączania żródła SEM. Jeżeli do obwodu drgającego zbliżymy drugi obwód, to siła magnetyczna cewki obwodu 1 będzie indukowała SEM w cewce obwodu 2 i w obwodzie 2 powstaną drgania
Są obwody o ...
Indukcja elektromagnetyczna (prawo indukcji Faradaya)
Zjawisko indukcji elektromagnetycznej polega na powstawaniu prądów elektrycznych wskutek zmian pola magnetycznego. Aby matematycznie ująć zjawisko indukcji wprowadzamy pojęcie strumienia indukcji magnetycznej B
B =S BdS
tzn. całka powierzchniowa wektora B po zorientowanej powierzchni S
Jeżeli w jednym obwodzie zmienia się natężenie prądu, to zgodnie z prawem indukcji Faradaya w drugim obwodzie znajdującym się w pobliżu jest indukowana SEM. Zjawisko to nazywane jest indukcją wzajemną. W przypadku pojedynczego obwodu występuje tzw. Zjawisko indukcji własnej.
29. Energia kinetyczna ruchu postępowego i potencjalna ciężkości
energia kinetyczna ciała jest równa pracy jaką może ono wykonać do chwili zatrzymania się. wyrażamy ją za pomocą wzoru k=mv2/2. Energia kinetyczna ruchu postępowego jest względna gdyż zależy od tego czy ciała się porusza, a jak wiadomo zawsze można wybrać taki układ odniesienia (inercjalny) względem którego ciało pozostaje w spoczynku.
energia potencjalna układu ciał jest równa pracy, którą ten układ może wykonać zmieniając względne położenie swoich części, czyli zmieniając swój stan. Energia potencjalna jest względna gdyż zależy od tego z jaką siłą oddziałują na siebie ciała, w przypadku energii potencjalnej ciężkości chodzi o oddziaływanie grawitacyjne ziemi, które nie jest stałe w każdym punkcie, a zatem ciało może w różnych punktach mieć różną energię potencjalną.
Wyszukiwarka