TEST IB
1. Twierdzenie Gaussa-Ostrogradskiego
![]()
Strumień wektora A wychodzącego z powierzchni zamkniętej S jest równy całce objętościowej dywergencji tego wektora w obszarze o objętości V, którego brzegiem jest ta powierzchnia.
Pole wektora, którego div A jest w analizowanym obszarze równa zeru nazywamy bezźródłowym lub solenoidalnym. Wtedy strumień wypływający z badanego obszaru jest równy wpływającemu do jego wnętrza. Wewnątrz obszaru pola nie ma źródeł ani studni.
2. Prawo zachowania energii dla pola elektromagnetycznego
Twierdzenie i wektor Poyntinga (Umowa -Poyntinga)
Prawo zachowania energii dla pola elektromagnetycznego - służy do badania przemian energii.
Twierdzenie Poytinga
Moc Ps pola elektromagnetycznego wpływająca (lub wypływająca) do obszaru zamkniętego o objętości V i powierzchni A jest równa całce powierzchniowej składowej normalnej Sn wektora Poytinga ,S, według:
![]()
Podobnie jak moc w obwodach elektrycznych, wektor Poytinga można wyrażać poprzez wartość chwilową i zespoloną.
3. Rozchodzenie się fali płaskiej w doskonałym przewodniku
Fala płaska w metalu ![]()
>> ![]()
W środowisku doskonale przewodzącym stała propagacji fali ![]()
i
impedancja falowa wyrażają się następująco:
![]()
![]()
Równania fali płaskiej w metalu:
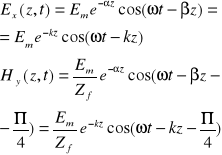
Amplitudy Em i Hm w metalu są wykładniczo tłumione w kierunku rozchodzenia się fali. O szybkości tłumienia decydują ![]()
i ![]()
. Stosunek dwóch sąsiednich amplitud tego samego znaku (dla z = ![]()
) wynosi 535, co oznacza że cała energia wchodząca z falą do metalu jest tracona całkowicie w warstwie o grubości ułamka milimetra.
Podstawowe właściwości fali płaskiej w metalu
1. Natężenie pola elektrycznego i gęstość prądu wyprzedają natężenie pola magnetycznego o ![]()
/4 radianów,
2. Faza wszystkich wielkości zmienia się o kz w miarę przesuwania się w głąb metalu,
3. Fale tłumione są ze współczynnikiem k,
4. Impedancja fali w metalu jest liczbą zespoloną, której część rzeczywista i urojona są sobie równe - moduły impedancji dla miedzi i stali wynoszą: |Zcu|=2,7 10-6![]()
Ω, |Zst|=2,4 10-4Ω,
5. Długością fali w metalu nazywamy głębokość z, na której faza składowych pola zmienia się o 2![]()
:
6. Prędkość fali w metalu:
![]()
![]()
7. Praktyczne wygasanie fali:
Fala elektromagnetyczna po przejściu w przewodniku drogi równej długości fali zostaje stłumiona do 0,0018 (0,18%) swej wartości na powierzchni przewodnika - fala wygasa na głębokości z=![]()
.
8. Równoważna głębokość wnikania fali: w obliczeniach szacunkowych wprowadza się pojęcie zastępczej głębokości wnikania δ, na jakiej wielkości E i H zostałyby całkowicie stłumione, przy równomiernym ich rozkładzie:
Na równoważnej głębokości ![]()
wektory E, J i H są tłumione proporcjonalnie do e-1=0,37 ich wartości na powierzchni przewodu.
9. Impedancja elektryczna masywnej półprzestrzeni
Jednostkowa impedancja elektryczna Zel metalowej półprzestrzeni równa jest jej impedancji falowej Zf. Masywne rzeczywiste ciało można zastąpić warstwą o skończonej grubości ![]()
, w której występuje równomierny rozkład wektorów pola
4. Parametry krytyczne nadprzewodników
Temperatura krytyczna Tc temperatura, poniżej której nadprzewodnik wykazuje nadprzewodnictwo przy zerowym natężeniu pola magnetycznego i przy zerowym prądzie elektrycznym natężenie krytycznego pola (magnetycznego) Hc natężenie krytyczne pola magnetycznego odpowiadające nadprzewodnikowej energii kondensacji3 przy zerowym
natężeniu pola magnetycznego
natężenie dolnego krytycznego pola (magnetycznego) Hc1 natężenie pola magnetycznego, przy którym flukson wnika po raz pierwszy do objętości nadprzewodników II rodzaju powodując odstępstwo od idealnego diamagnetyzmu
natężenie górnego krytycznego pola(magnetycznego) Hc2 maksymalne natężenie pola magnetycznego, poniżej którego nadprzewodnik II rodzaju jest w stanie mieszanym
prąd krytyczny Ic maksymalny prąd stały, który może być rozpatrywany jako płynący bez rezystancji
gęstość prądu krytycznego Jc gęstość prądu elektrycznego przy prądzie krytycznym
określona albo dla całego przekroju przewodu (całkowita), albo gdy występuje stabilizator, niestabilizowanej części przewodu
Ze względu na wartość temperatury krytycznej wprowadzono podział na nadprzewodniki niskotemperaturowe (LTS low temperature superconductor) oraz nadprzewodniki wysokotemperaturowe (HTS high temperature superconductor). Umowną granicą rozdzielającą nadprzewodniki niskotemperaturowe od wysokotemperaturowych jest Tc = 25 K, wynikająca z teorii mikroskopowej BCS.
gal pierwiastek LTS Tk=1,1K,
aluminium pierwiastek LTS Tk=1,2K K,
tal pierwiastek LTS 2,4K
MgB2 dwuborek HTS Tk=39-40K,
Y-123 ceramika HTS Tk=87K,
Bi-2212 ceramika HTS Tk=90-92K,
Bi-2223 ceramika HTS Tk=108K
5.Metoda różnic skończonych
Obszar zostaje podzielony najczęściej równomierną siatką:
Przypadek dwuwymiarowego równania Laplace'a w układzie współrzędnych prostokątnych x,y, w którym równanie ma postać:
![]()
Równanie Laplace'a zastępujemy jego dyskretnym analogiem:
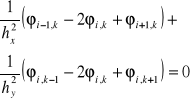
dla wszystkich punktów i,k leżących wewnątrz obszaru.
Na brzegu obszaru w przypadku zagadnienia wewnętrznego formułujemy warunek brzegowy Dirichleta:
![]()
w najprostszy sposób przenosimy do najbliższego węzła:
Takie sprowadzenie warunku brzegowego na siatkę powoduje spadek dokładności obliczeń w otoczeniu brzegu do rzędu hx,hy.
Wzrost dokładności obliczeń uzyskuje się przez dobór odpowiednio małego kroku hx, hy.
TEST IIB
1. Prawo Biota-Savarta
Prawo Ampere'a możemy łatwo stosować do znajdowania pola magnetycznego (indukcji magnetycznej) tylko wtedy, gdy rozkład prądów jest symetryczny. Jeżeli pole jest tworzone przez prąd płynący w krzywoliniowym przewodniku lub przez wiele prądów o różnych wartościach i różnej orientacji w przestrzeni, zastosowanie prawa Ampere'a może sprawiać trudności i wówczas stosujemy prawo Biota-Savarta.
Obliczając indukcję B pola magnetycznego w dowolnym punkcie P dzielimy prąd na dowolnie małe elementy - odcinki dl przewodu z prądem o natężeniu i (mają one kierunek stycznej do przewodu) i obliczamy wkłady dB wnoszone do wartości indukcji pola przez każdy z tych nieskończenie małych elementów.
Zgodnie z prawem Biota-Savarta, wartość liczbowa elementarnej indukcji dB pola wytworzonego przez elementarny prąd idl:
![]()
![]()
![]()
I=5A, r=0,1m
![]()
, ![]()
![]()
2. Równania falowe E i H w rzeczywistym dielektryku
![]()
![]()
3. Zjawisko naskórkowości
Nierównomierny rozkład pola elektromagnetycznego opisany wektorami E, H, J, B, A w przewodniku nazywamy zjawiskiem naskórkowości, wypierania (skin effect).
W przewodniku o stałym przekroju gęstość prądu stałego jest rozłożona równomiernie natomiast prąd przemienny maleje od powierzchni w głąb przewodu, osiągając największą wartość na jego powierzchni. Silne zjawisko naskórkowości:
Gdy głębokość wnikania fali elektromagnetycznej jest znacznie mniejsza od wymiarów przewodnika w kierunku jej wnikania: δ<<d.
Słabe zjawisko naskórkowości:
Gdy wymiary przewodnika w kierunku wnikania fali są wielokrotnie mniejsze od głębokości wnikania.
Rezystancja i reaktancja przewodu z prądem
Dla stałej gęstości prądu w przewodzie o przekroju kołowym (przy słabym zjawisku naskórkowości):
![]()
![]()
![]()
Wpływ silnego zjawiska naskórkowości:
4. Metoda elementów skończonych
Metoda Elementów Skończonych albo Metoda Elementu Skończonego (MES, ang. FEM, finite-element method) - zaawansowana matematycznie metoda obliczeń fizycznych opierająca się na podziale obszaru (tzw. dyskretyzacja, ang. mesh), najczęściej powierzchni lub przestrzeni, na skończone elementy uśredniające stan fizyczny ciała i przeprowadzaniu faktycznych obliczeń tylko dla węzłów tego podziału. Poza węzłami wyznaczana właściwość jest przybliżana na podstawie wartości w najbliższych węzłach.
Idea metody polega na podziale analizowanego obszaru Ω na skończoną liczbę podobszarów o różnych kształtach tworzących sieć elementów:
![]()
Wewnątrz każdego elementu skończonego Λe do aproksymacji zmiennych decyzyjnych stosuje się funkcje bazowe, zwane też funkcjami kształtu, najczęściej wyrażane poprzez wielomian zupełny współrzędnych w przestrzeni. Funkcje kształtu pozwalają na powiązanie zmiennych decyzyjnych w dowolnym punkcie elementu z wartościami węzłowymi. Sformułowanie zadania globalnego wymaga minimalizacji funkcjonału energetycznego będącego sumą składowych pochodzących od poszczególnych elementów.
5. Efekt Meissnera
Efekt Meissnera to zjawisko polegające na całkowitym wypychaniu pola magnetycznego z nadprzewodnika, odkryte w 1933 roku przez Walthera Meissnera i Roberta Ochsenfelda.
Zjawisko Meissnera jest podstawą do określenia, czy dany przewodnik o zerowym oporze elektrycznym jest rzeczywiście nadprzewodnikiem.
Jeżeli nadprzewodnik zostanie umieszczony w bardzo silnym polu magnetycznym to przestaje być nadprzewodnikiem, jeżeli natężenie pola będzie się zmniejszać, to w momencie przejścia w stan nadprzewodnictwa pole zostanie wypchnięte z nadprzewodnika. Przyczyną wypchnięcia jest pojawienie się w powierzchownej warstwie nadprzewodnika prądu elektrycznego o takim natężeniu, że wytworzone przez niego pole magnetyczne kompensuje wewnątrz nadprzewodnika pole magnetyczne.
Różnica między nadprzewodnikiem, a przewodnikiem o zerowym oporze (efekt Meissnera)
w temperaturze powyżej krytycznej w obu materiałach występuje pole magnetyczne
obniżenie temperatury powoduje, że z nadprzewodnika pole zostaje wypchnięte
zwiększanie pola dla nadprzewodnika powoduje:
- zniszczenie stanu nadprzewodzącego (nadprzewodniki I rodzaju)
- wnikanie pola w postaci wirów o strumieniu pojedynczych fluksonów (nadprzewodniki II rodzaju)
TEST IIIB
1. Potencjały elektrodynamiczne
Rozwiązanie równań falowych nastręcza wiele trudności natury matematycznej.
Można ich uniknąć wprowadzając pomocnicze funkcje: wektorową A i skalarną ϕ,
zwane potencjałami elektrodynamicznymi.
![]()
![]()
![]()
![]()
- niejednorodne równanie falowe potencjału wektorowego (dla pól szybkozmiennych)
![]()
- niejednorodne równanie falowe potencjału skalarnego
Dla pól statycznych i wolnozmiennych:![]()
![]()
- równanie typu Poissona
Dla dielektryka: ![]()
równanie typu Laplace'a
2. Fala płaska w dielektryku idealnym
Wektory E i H oraz potencjały elektrodynamiczne spełniają niejednorodne równania falowe, których ogólne rozwiązanie można przedstawić w postaci sumy dwóch funkcji czasu i współrzędnych.
Dla fali elektromagnetycznej poruszającej się wzdłuż osi z w idealnym dielektryku, przy założeniu, że potencjał wektorowy A [Ax, 0, 0] można zapisać równanie falowe potencjału wektorowego:
![]()
Rozwiązanie równania jest sumą dwóch funkcji dwukrotnie różniczkowalnych:
![]()
Ponieważ: ![]()
potencjał skalarny nie ma natury falowej
![]()
![]()
![]()

Impedancja falowa w idealnym dielektryku jest liczba rzeczywistą, co oznacza że wektory natężenia pola elektrycznego i magnetycznego są ze sobą w fazie.
3. Równanie Poissona
Prawo Gaussa - postać różniczkowa
Równanie Poissona
dywergencja
gradient
laplasjan (operator Laplace'a)
Pole wytworzone przez jednorodnie naładowaną dielektryczną kulę
.
Kula o promieniu
i gęstości objętościowej ładunku Ro. ładunek całkowity :
Natężenie pola elektrycznego (obliczone za pomocą metody Gaussa)
(uwaga: zależność liniowa)
Potencjał (względem
)
(uwaga: zależność kwadratowa)
4. Sposoby chłodzenia nadprzewodnikowych uzwojeń w urządzeniach elektrycznych
Urządzenia nadprzewodnikowe są izolowane termicznie od otoczenia, co realizowane jest przez umieszczenie ich w specjalnych kriostatach wyposażonych w złożoną izolację termiczną minimalizującą dopływ ciepła z zewnątrz drogą przewodnictwa, konwekcji i promieniowania. Jest to zazwyczaj wysokopróżniowa izolacja termiczna z wielowarstwowymi ekranami z folii aluminiowej minimalizującymi dopływ ciepła przez promieniowanie i miedzianymi ekranami cieplnymi.
Można wyróżnić cztery podstawowe techniki chłodzenia urządzeń nadprzewodnikowych:
- chłodzenie w kąpieli( urządzeń nadprzewodnikowe są chłodzone w kąpieli helu II (T=1,8 K) lub helu I (T = 4,2 K), ciekłego wodoru(T = 20,4 K), ciekłego azotu (T = 77 K) )
- chłodzenie wymuszone (realizowane przez przepływ ciekłego lub gazowego helu, wodoru lub azotu w kanałach chłodzących wewnątrz uzwojenia i po jego powierzchni, w rurkach umieszczonych wewnątrz przewodu nadprzewodnikowego bądź w rurkach nawiniętych na chłodzone uzwojenie )
- chłodzenie kontaktowe (przy wykorzystaniu kriochłodziarki)
- chłodzenie w kąpieli ze wspomaganiem.( uzwojenie zanurzone jest w cieczy kriogenicznej a kriochłodziarka odbiera ciepło od tej cieczy)
5. Kryteria dokładności w metodzie relaksacyjnej
Metoda Gaussa-Seidela
Metoda Gaussa-Seidela, zwana również relaksacyjna jest rozwinięciem metody spadku względem współrzędnych. Również polega ona na minimalizacji funkcji wzdłuż kierunków ortogonalnej bazy S1 .. Sn. Baza ta utworzona jest w wektorów jednostkowych układu współrzędnych kartezjańskich. Różnica miedzy standardowa metoda spadku względem współrzędnych a metoda Gaussa-Seidela polega na tym, iż w tej drugiej krok nie jest stały. Ta metoda również wiec polega na takim poruszaniu sie w dziedzinie funkcji, aby osiągnąć szukane minimum za pomocą zmiany tylko jednej współrzędnej w jednym kroku. Jednak metoda ta jest szybciej zbieżna od klasycznej metody spadku względem współrzędnych, a przy tym dokładniejsza.
Oznaczenia:
x0 - punkt startowy
S1 .. Sn - baza wektorowa ortogonalnych (dla dwóch zmiennych n = 2)
e0 - początkową długość kroku
ej - wymagana dokładność obliczeń w j-tym kierunku
e - wymagana dokładność obliczeń minimum globalnego
Algorytm:
1) W punkcie startowym (x0,y0) obliczamy wartość funkcji f(x0,y0) - przyjmujemy funkcje dwóch zmiennych dla porównania z metoda spadku względem współrzędnych.
2) Obliczamy gradient funkcji w j-tym kierunku i poruszamy sie w stronę malejących wartości funkcji. Współrzędne następnego punktu obliczamy z warunku istnienia ekstremum.
gdzie xj oznacza kolejne kierunki (w tym przypadku współrzędną x)
3) Zmieniamy kolejna współrzędną (y) na tych samych zasadach (teraz xj oznacza współrzędną y).
4) Obliczenia kończymy, gdy przesuniecie punktu wzdłuż wszystkich kierunków bazy (w naszym przypadku dwóch) jest mniejsze od wymaganej dokładności.
Algorytm ten jest jednak mało efektywny, gdy poziomice funkcji maja kształt długich wąskich dolin. Wtedy poruszać sie musimy małą długością kroku, co zwiększa ilość iteracji, przy czym dla tego rodzaju funkcji często ta metoda okazuje sie zawodna.
Jeśli funkcja celu ma postać f(x) = 0,5*x^T*A*x, to metoda Gaussa-Seidela jest zbieżna do punktu ekstremalnego wtedy i tylko wtedy, gdy macierz A jest dodatnio określona.
Kryterium zbieżności [dxi]<=E.
.
Dowód twierdzenia o zbieżności metody Gaussa-Seidela
W rozpatrywanym przypadku gradient funkcji f(x) można zapisać jako:
Przesuniecie punktu w i-tej iteracji określone jest wiec zależnością wynikającą z warunku koniecznego istnienia ekstremum w kierunku:
Z tego równania uzyskujemy wartość ki minimalizującą funkcje f(x) w kierunku Si:
ai - i-ty wiersz macierzy A,
aii - odpowiedni element macierzy A.
Wartość funkcji celu w punkcie xi+1 = xi + ki*Si można również przedstawić jako:
Z dwóch ostatnich zależności otrzymujemy zależność:
z której widać, iż w każdej kolejnej iteracji wartość funkcji celu maleje, ponieważ elementy aii > 0 dla dodatnio określonej macierzy A. Ponieważ na wstępie założono, iż funkcja celu jest ograniczona od dołu (takie jest wymaganie dla wszystkich opisywanych metod za wyjątkiem trzech pierwszych), tym samym algorytm Gaussa-Seidela jest zbieżny.
Wyszukiwarka