ZAUTOMATYZOWANE SYSTEMY STEROWANIA 2008-01-26
Co to jest system dynamiczny ?
Co to jest system statyczny?
Od czego zależy dynamika w obiekcie opisanym równaniem

?Od czego zależy stacjonarność w obiekcie opisanym równaniem

?Od czego zależą zmienne w równaniu

?Jaki typ obiektu opisuje równanie

?Co umożliwia liniowość obiektu ?
Co oznacza że model obiektu jest ciągły ?
Jaki jest obiekt opisany równaniem różnicowym

?Jaki obiekt możemy opisać za pomocą transmitancji s lub z ?
Kiedy system jest obserwowalny?
Kiedy system jest sterowalny ?
Jakie modele matematyczne stosujemy do opisu obiektu dynamicznego?
Jakie obiekty opisują transmitancje dyskretne
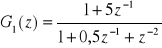
i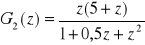
Jaka jest różnica pomiędzy algorytmem prędkościowym a przyrostowym ?
Własności modelu ARMA
Co znaczy system rozproszony?
Jakie są cechy sieci przemysłowych ?
Co jest widoczne w języku maszynowym widoczne ?
Co stosujemy w języku symbolicznym niższego poziomu ?
Główne cechy oprogramowania?
Cel stosowania faktoryzacji transmitancji.
Co daje zastosowanie układu regulacji z regulatorem typu P ?
Kiedy stosujemy sterowanie adaptacyjne?
Co to jest sterownik kompaktowy ?
Co to jest zjawisko stroboskopowe?
Co cechuje program do sterownika?
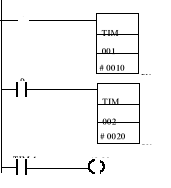
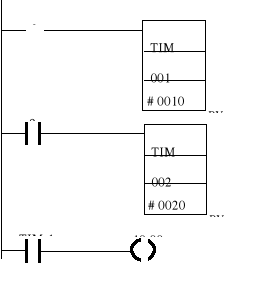
Co należy wstawić na górze w generatorze impulsów jak na rysunku?
Dla rysunku zakładając, że są poprawnie wpisane adresy i styk to jak długo będzie działać czasówka TIM2?
Jak w licznikach eliminuje się „drgania” styków aby nie zliczały tych drgań:?
Co to jest sygnał deterministyczny ?
Jakie cech powinny charakteryzować tor pomiarowy jako sprzężenie zwrotne ?
Co jest niezbędne do doboru nastaw regulatora PID ?
Co jest potrzebne do oceny układu regulacji ?
Cechy wskaźników całkowych.
W jakiej sytuacji stosujemy regulator Smitha ?
Kiedy stosujemy superkomputery ?
Kidy stosujemy sterowanie zaawansowane?
Co umożliwia jedno wyjście cyfrowe (dwustanowe) ze sterownika ?
Co powoduje bifurkacja ?
W jakich okolicznościach występuje chaos ?
Istota szeregowego połączenie regulatorów .
Co można zrobic przy użyciu implikacji (JEŻELI - TO) ?
Co daje zagęszczenie funkcji przynależności ?
Różnice pomiędzy regulatorem rozmytym a klasycznym PID ?
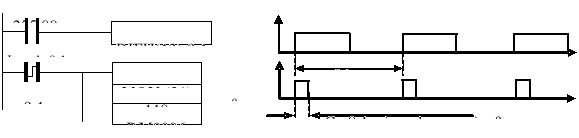
Jak długi jest impuls na styku 9.1 ?
Kiedy stosujemy układ zatrzaskowy, z samopodtrzymaniem ?
Przy priorytecie dla warunku STOP, co spowoduje równoczesne naciśnięcie przycisku START I STOP
Co się dzieje z danymi w sieci komputerowej, gdy przechodzą z górnych warstw do dolnych ?
Co jest główną wadą wyjść przekaźnikowych w sterownikach?
Jaki musi być obiekt aby zastosować algorytm prędkościowy ?
Dlaczego układ regulacji traktujemy jako jednowymiarowy typu SISO a mamy dwa wejścia: zadające i zakłócające?
Na podstawie czego można określić czas próbkowania ?
Na czym polega synchronizacja z czasem rzeczywistym?
Gdy zwłoka czasowa wynosi L to ile powinien wynosić czas próbkowania ?
Po co stosujemy modulację ?
Typy enkoderów.
Jakie cechy są przerwań ?
Co ma wpływ na długość czasu cyklu sterownika ?
Po wprowadzeniu wskaźnika instrukcją MOVR 3 IR2 co się stanie po instrukcji MOV #5 ,-IR2 ?
Na czym polega bezszwowa komunikacja w systemach sterownikowych ?
Dlaczego w przyciskach bezpieczeństwa zaleca się stosować styki normalnie zamknięte?
Czy program w języku tekstowym do sterownika można pisać w Wordzie?
Na sprzęcie podawana jest dwucyfrowa klasa zabezpieczenia obudowy IP. Co ona oznacza ?
W jaki sposób stosując regulator PID do sterowania obiektem nieliniowym uzyskać zadowalającą jakość sterowania?
Jak wydrukować raporty o produkcji ze sterownika?
Wyszukiwarka