I Dobór nastaw ciągłych regulatorów PID wg uproszczonych procedur praktycznych

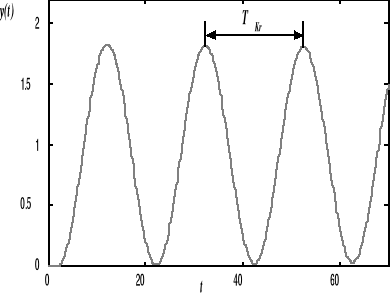
Rys.1. Przebieg sygnału sterowanego z tłumieniem połówkowym
Poprzez „dobór nastaw” rozumie się takie dopasowanie („strojenie”) parametrów algorytmu regulatora PID (Kp, Ti, Td), aby układ posiadał zadane właściwości. Zadanie to jest stosunkowo proste, pod warunkiem znajomości matematycznego modelu obiektu regulacji. Można wtedy zastosować cały dostępny aparat matematyczny i wyznaczyć parametry regulatora na drodze analitycznej. Bardzo często jednak model taki jest niedostępny, należy wiec stosować metody przybliżonej identyfikacji obiektu. Najstarszymi i najbardziej rozpowszechnionymi są metody Zieglera-Nicholsa (1942). Nastawy zapewniają tzw. tłumienie połówkowe, jak na (rys. 1), czyli ![]()
1. Metoda częstotliwościowa Zieglera - Nicholsa („metoda testu drgań”)
Rys. 2. Przebieg wyjściowy układu znajdującego się na granicy stabilności
Identyfikacja obiektu odbywa się w układzie jak na rys. 2 zawierającym tylko regulator P (należy „wyłączyć” całkowanie i różniczkowanie). W układzie tym zmieniane jest wzmocnienie regulatora Kp aż do osiągnięcia tzw. „punktu krytycznego” (Kkr), czyli punktu, w którym układ znajduje się na granicy stabilności. Wystąpią wtedy w układzie drgania niegasnące (o stałej amplitudzie), których okres (Tkr), należy odczytać (Rys. 2). Nastawy regulatora oblicza się następnie na podstawie tablicy 1
TABLICA 1. Nastawy Z-N wg.” testu drgań”
Typ regulatora |
Kp |
Ti |
Td |
P |
0.5 Kkr |
- |
- |
PI |
0.45 Kkr |
0.8 Tkr |
- |
PID |
0.6 Kkr |
0.5 Tkr |
0.125 Tkr |
2. Czasowa metoda Zieglera - Nicholsa (odpowiedzi skokowej)
Metody czasowe polegają na identyfikacji obiektu jako inercyjnego I-go rzędu z opóźnieniem, czyli w postaci zastępczej transmitancji
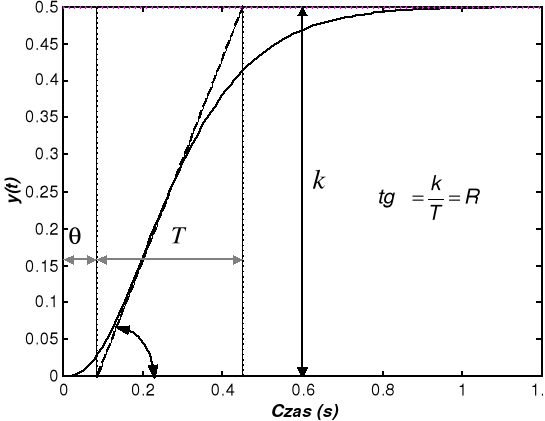
Rys. 3. Odpowiedź skokowa obiektu z zaznaczonymi parametrami jego modelu zastępczego
![]()
gdzie: k - wzmocnienie obiektu, T - stała czasowa obiektu, θ - czas opóźnienia, której parametry odczytywane lub wyliczane są z odpowiedzi skokowej (rys. .3). Nastawy wybranego typu regulatora z klasy PID, odczytuje się z tabeli 2 lub tabeli 3.
TABLICA 2. Nastawy Z-N, metoda czasowa (eksperyment skoku jednostkowego)
Typ regulatora |
Kp |
Ti |
Td |
P |
0.5T/kθ |
- |
- |
PI |
0.9 T/kθ |
θ /0.3T |
- |
PID |
1.2T/kθ |
2θ /T |
0.5θ /T |
TABLICA 3. Nastawy wg zmodyfikowanej metody Z-N
Typ regulatora |
Kp |
Ti |
Td |
P |
1/Rθ |
- |
- |
PI |
0.9 /Rθ |
3.33θ |
- |
PID |
1.2T/Rθ |
2θ |
0.5θ |
gdzie: ![]()
- jest maksymalna prędkość zmian charakterystyki skokowej obiektu.
3. Metoda charakterystyk logarytmicznych
Dysponując charakterystykami częstotliwościowymi (Bodego) obiektu regulacji możliwe jest wyznaczenie nastaw ciągłego regulatora PID, porównywalnych z nastawami uzyskanymi z poprzednim eksperymentów.

Rys.4. Charakterystyki logarytmiczne układu otwartego z regulatorem proporcjonalnym
Z rys. 4 można zauważyć, że zamknięty układ regulacji znajduje się na granicy stabilności, gdy wzmocnienie układu otwartego wynosi 1 oraz gdy przesuniecie fazowe ϕ =- π.
Regulator P w torze głównym nie wpływa na charakterystykę fazową, jedynie (w pionie) przesuwa charakterystykę amplitudową o ΔL= 20 log Kp. Można więc wyznaczyć pulsację krytyczną ϖKr jako pulsację odpowiadającą punktowi przecięcia się charakterystyki fazowej z prostą ϕ =- π oraz wzmocnienie krytyczne Kkr =10ΔL/20, gdzie ΔL jest marginesem wzmocnienia odczytany z charakterystyki amplitudowej.
4. Inne praktyczne metody doboru nastaw regulatorów PID
TABLICA 4. Nastawy regulatora PID wg Cohen-Coon (tzw. CC)
TABLICA 5. Nastawy regulatora PID wg. Chien - Hrones - Reswick (CHR)
II Dobór nastaw cyfrowych regulatorów PID wg uproszczonych procedur praktycznych
1. Dyskretny (cyfrowy) układ regulacji ( przykładowy schemat blokowy)

2. Różne wersje i postacie cyfrowych algorytmów PID

![]()

![]()


(5)
lub

Zmodyfikowany algorytm przyrostowy:

gdzie: y - wielkość wyjściowa obiektu; ![]()
- wartość zadana wielkośći y


lub algorytm aproksymowany metodą operatora Tustina:


3. Nastawy Zieglera - Nicholsa dyskretnego w czasie UAR wg metoda czasowej i „testu drgań”

Tablica 6: Tabela nastaw wg. Zieglera - Nicholsa (zmodyfikowana przez Takahashi) dla cyfrowego UAR
|
Wartości parametrów regulatora cyfrowego wg. zmodyfikowanego kryterium Z-N |
|||||||
Typ |
Z próby skokowej obiektu ( |
Na podstawie testu drgań ( |
||||||
regulat. |
|
|
|
|
|
|
||
P |
|
__ |
__ |
|
__ |
__ |
||
PJ |
|
|
__ |
|
|
__ |
||
PID |
|
|
|
|
|
|
||



Tablica 7: Tabela nastaw wg. Zieglera - Nicholsa (zmodyfikowana przez Takahashi) dla cyfrowego UAR (test drgań)
|
|
|
|
Uwagi |
P |
|
-
|
-
|
- |
PI
|
|
|
-
|
Wartości mniejsze jeżeli
|
PID
|
|
|
|
Stosować tylko dla
|
E. Żak
Podstawy automatyki - TEORIA STEROWANIA
7
E. Żak
TEORIA STEROWANIA wykład na kierunku Informatyka (ID)
___________________________________________________________________________
Wyszukiwarka
Podobne podstrony:
Urządzenia 101 - parametry łączników protokół (tylko dla ZAO, Politechnika Lubelska, Studia, semestr
Sieci 9, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Teoria ster. 4, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Oświetlenie 11, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Materiałoznawstwo 6(1), Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Metrologia 23 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Sieci 14, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Napęd E. 20 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Sieci 11, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Miernictwo p.8 - pomiar ilości ciepła, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Oświetlenie 8, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Metrologia 18, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Metrologia 16, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Identyfikacja 6-9 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Elektronika 6 protokół stary, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
więcej podobnych podstron