POLITECHNIKA WARSZAWSKA INSTYTUT MASZYN ELEKTRYCZNYCH |
||
LABORATORIUM MASZYN ELEKTRYCZNYCH |
||
TEMAT ĆWICZENIA:
BADANIE SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO |
WYKONAWCY: 1. Ireneusz TRYFON 2. Mariusz SZWEJKOWSKI 3. Marek ZDUNEK 4. Piotr PIETRACZUK 5. Michał MISZCZAK |
|
Rok AK. 2007/2008 |
SEM. VI |
ĆWICZENIE PROWADZIŁ : Dr inż. Bogusław ZALESKI |
DZIEŃ 16.05.2008 |
GODZINA: 16.10 ÷ 19.25 |
OCENA: |
Dane znamionowe silnika:
Typ: Surf 112M - 4B
Un = 380V / 3f
f = 50Hz
nn = 1410 obr/min
I1 = 9 A
I2 = 17,6 A
cos φ = 0,81
Pn = 4,4 kW
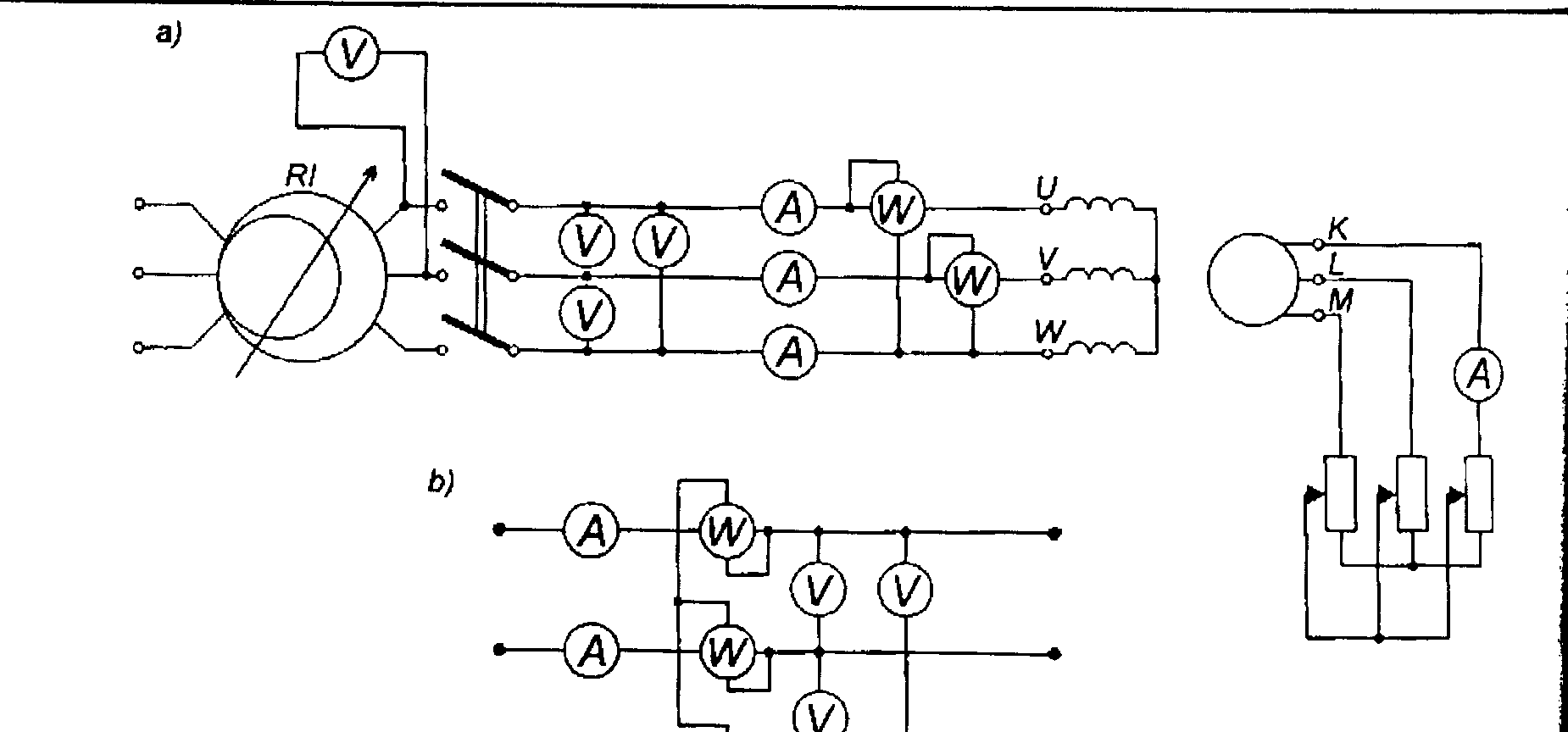
1. STAN BIEGU JAŁOWEGO
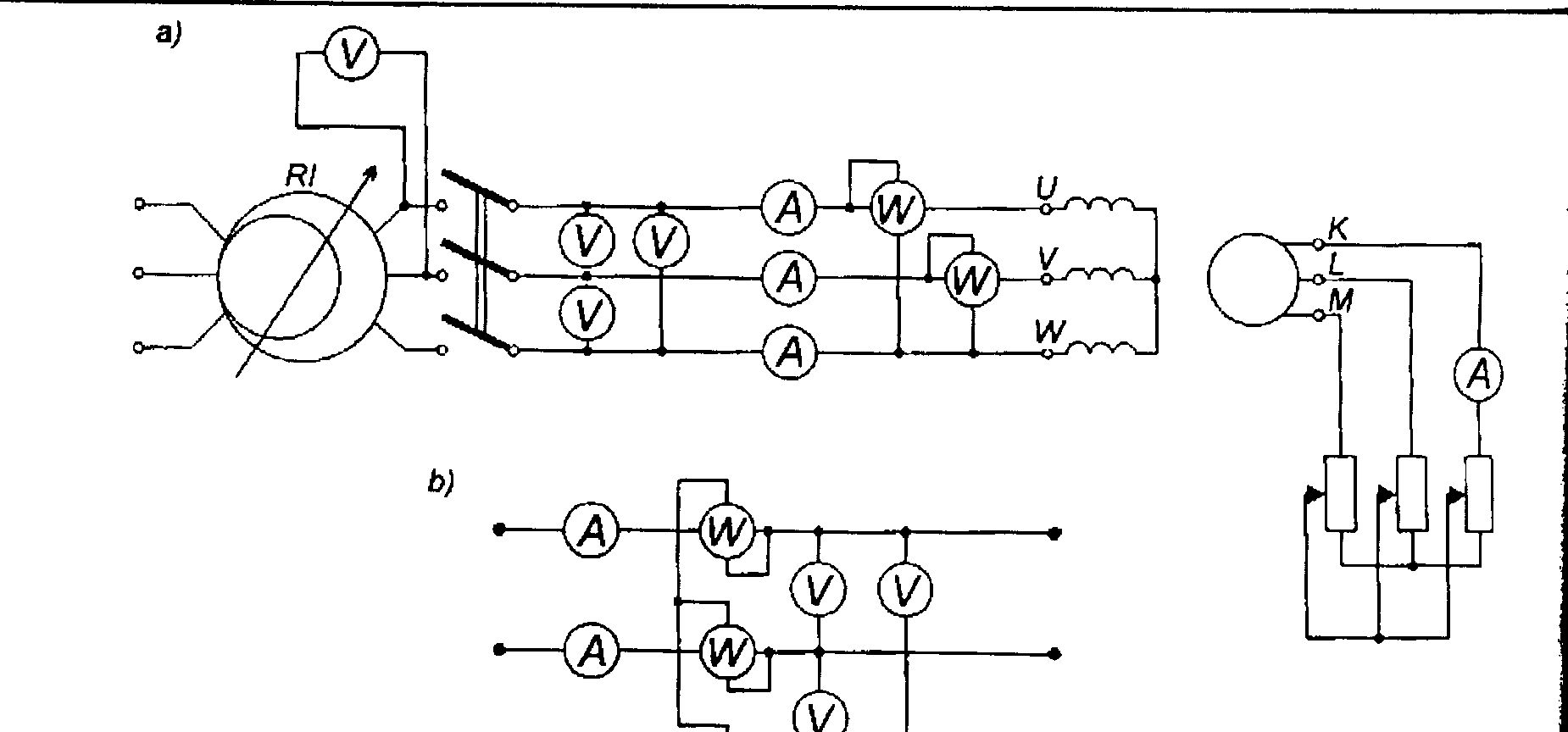
Rys 1. Schemat połączeń do badania stanu biegu jałowego.
Lp. |
Uuv |
Uvw |
Uuw |
U |
Iu |
Iv |
Iw |
I0 |
Pα |
Pβ |
P10 |
cosϕ0 |
sinϕ0 |
I0w |
If |
- |
V |
V |
V |
V |
A |
A |
A |
A |
W |
W |
W |
- |
- |
A |
A |
1 |
400 |
400 |
400 |
400 |
5,0 |
5,0 |
5,0 |
5,0 |
1200 |
-800 |
400 |
0,115 |
0,993 |
0,575 |
4,965 |
2 |
360 |
360 |
350 |
357 |
3,8 |
3,8 |
3,8 |
3,8 |
800 |
-500 |
300 |
0,128 |
0,992 |
0,486 |
3,770 |
3 |
320 |
320 |
310 |
317 |
3,2 |
3,2 |
3,2 |
3,2 |
600 |
-380 |
220 |
0,125 |
0,992 |
0,400 |
3,174 |
4 |
280 |
280 |
276 |
279 |
2,6 |
2,6 |
2,6 |
2,6 |
440 |
-220 |
220 |
0,175 |
0,985 |
0,455 |
2,561 |
5 |
240 |
240 |
235 |
238 |
2,2 |
2,2 |
2,2 |
2,2 |
320 |
-130 |
190 |
0,209 |
0,978 |
0,460 |
2,152 |
6 |
200 |
200 |
195 |
198 |
1,8 |
1,8 |
1,8 |
1,8 |
250 |
-60 |
190 |
0,308 |
0,951 |
0,554 |
1,712 |
7 |
160 |
160 |
160 |
160 |
1,5 |
1,5 |
1,5 |
1,5 |
200 |
-10 |
190 |
0,457 |
0,889 |
0,685 |
1,333 |
8 |
120 |
120 |
115 |
118 |
1,3 |
1,3 |
1,3 |
1,3 |
140 |
30 |
170 |
0,640 |
0,768 |
0,832 |
0,998 |
9 |
100 |
100 |
100 |
100 |
1,3 |
1,3 |
1,3 |
1,3 |
130 |
50 |
180 |
0,799 |
0,601 |
1,039 |
0,781 |
Przykładowe obliczenia :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Na podstawie pomiarów wykonano charakterystyki :
● moc wypadkową w funkcji napięcia zasilania ![]()
● prądu w stanie jałowym w funkcji napięcia zasilania ![]()
● składowej czynnej prądu stanu jałowego w funkcji napięcia zasilania ![]()
● składowej biernej prądu stanu jałowego w funkcji napięcia zasilania ![]()
● współczynnika mocy w funkcji napięcia zasilania ![]()
oraz rozdział strat jałowych silnika :
● moc wypadkowa w funkcji kwadratu napięcia zasilania ![]()
2. WYZNACZANIE POCZĄTKOWEGO MOMENTU ROZRUCHOWEGO
Rys. 2. Układ do wyznaczania początkowego momentu rozruchowego.
Rd = 0 Ω |
Rd1= 0,4Ω |
Rd2= 2,3Ω > Rd1 |
||||||
U |
I |
Mp |
U |
I |
Mp |
U |
I |
Mp |
V |
A |
Nm |
V |
A |
Nm |
V |
A |
Nm |
85 |
9,0 |
1,21 |
95 |
9,0 |
2,16 |
215 |
9,0 |
16,20 |
70 |
7,5 |
0,76 |
80 |
7,5 |
1,57 |
180 |
7,5 |
11,12 |
60 |
6,0 |
0,45 |
65 |
6,0 |
1,06 |
145 |
6,0 |
6,81 |
45 |
4,5 |
0,29 |
50 |
4,5 |
0,63 |
110 |
4,5 |
3,77 |
30 |
3,0 |
0,17 |
30 |
3,0 |
0,35 |
75 |
3,0 |
1,76 |
15 |
1,5 |
0,15 |
15 |
1,5 |
0,21 |
40 |
1,5 |
0,08 |
Na podstawie pomiarów wykonano charakterystyki :
● początkowego momentu rozruchowego w funkcji napięcia zasilania ![]()
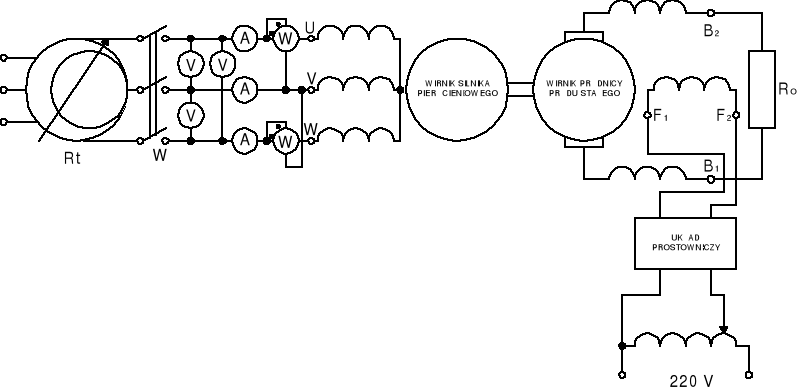
3. STAN OBCIĄŻENIA
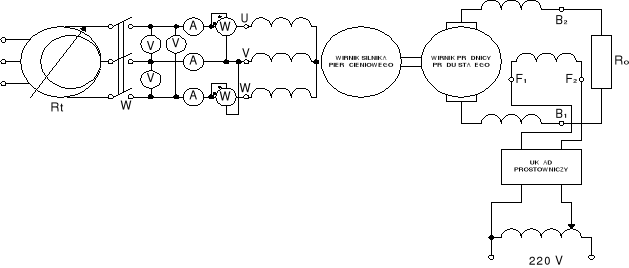
Rys. 3. Układ pomiarowy do stanu obciążenia
Lp. |
UUV |
UVW |
UUW |
Uśr |
IU |
IV |
IW |
Iśr |
Pα |
Pβ |
P1 |
|
V |
V |
V |
V |
A |
A |
A |
A |
W |
W |
W |
1 |
380 |
380 |
380 |
380 |
4,3 |
4,3 |
4,3 |
4,3 |
1000 |
-600 |
400 |
2 |
380 |
380 |
380 |
380 |
4,5 |
4,5 |
4,5 |
4,5 |
1320 |
-240 |
1080 |
3 |
380 |
380 |
380 |
380 |
5,0 |
5,0 |
5,0 |
5,0 |
1640 |
120 |
1760 |
4 |
380 |
380 |
380 |
380 |
5,5 |
5,5 |
5,5 |
5,5 |
1920 |
400 |
2320 |
5 |
380 |
380 |
380 |
380 |
6,0 |
6,0 |
6,0 |
6,0 |
2160 |
560 |
2720 |
6 |
380 |
380 |
380 |
380 |
7,0 |
7,0 |
7,0 |
7,0 |
2600 |
920 |
3520 |
7 |
380 |
380 |
380 |
380 |
7,5 |
7,5 |
7,5 |
7,5 |
2760 |
1080 |
3840 |
8 |
380 |
380 |
380 |
380 |
8,0 |
8,0 |
8,0 |
8,0 |
3000 |
1240 |
4240 |
9 |
380 |
380 |
380 |
380 |
8,5 |
8,5 |
8,5 |
8,5 |
3160 |
1400 |
4560 |
Lp. |
M |
x |
t |
s |
n |
P2 |
cosϕ |
η |
|
Nm |
- |
s |
- |
obr/min |
W |
- |
- |
1 |
0,01 |
9 |
20 |
0,009 |
1486 |
93,3 |
0,1413 |
0,233 |
2 |
0,09 |
15 |
20 |
0,015 |
1477 |
834,8 |
0,3646 |
0,773 |
3 |
0,16 |
34 |
20 |
0,034 |
1449 |
1455,9 |
0,5348 |
0,827 |
4 |
0,21 |
45 |
20 |
0,045 |
1432 |
1888,5 |
0,6409 |
0,814 |
5 |
0,25 |
57 |
20 |
0,057 |
1414 |
2220,0 |
0,6888 |
0,816 |
6 |
0,35 |
45 |
10 |
0,090 |
1365 |
3000,3 |
0,7640 |
0,852 |
7 |
0,39 |
60 |
10 |
0,120 |
1320 |
3232,9 |
0,7779 |
0,842 |
8 |
0,43 |
50 |
8 |
0,125 |
1312 |
3542,9 |
0,8052 |
0,836 |
9 |
0,48 |
40 |
5 |
0,160 |
1260 |
3798,1 |
0,8151 |
0,833 |
Przykładowe obliczenia do stanu obciążenia


![]()
![]()
![]()
![]()
![]()
![]()
![]()
Na podstawie pomiarów wykonano charakterystyki :
● prądu obciążenia w funkcji mocy oddanej ![]()
● prędkości obrotowej w funkcji mocy oddanej ![]()
● poślizgu w funkcji mocy oddanej ![]()
● sprawności w funkcji mocy oddanej ![]()
● współczynnika mocy w funkcji mocy oddanej ![]()
4. Regulacja prędkości przez zmianę częstotliwości.
Badanie i pomiary zostały wykonane w układzie silnika pierścieniowego zasilanego z falownika .
Wyznaczanie charakterystyk silnika przeprowadzone zostało w sposób następujący :
◙ Silnik pierścieniowy został zasilony z falownika ,
◙ Wartość częstotliwości napięcia zasilającego była regulowana,
◙ Dokonano pomiarów wartości napięcia zasilania i prędkości obrotowej przy danej wartości f .
Lp |
f |
|
U |
|
Hz |
obr/min |
V |
1 |
5 |
97 |
25 |
2 |
10 |
213 |
45 |
3 |
15 |
300 |
70 |
4 |
20 |
400 |
90 |
5 |
25 |
501 |
110 |
6 |
30 |
591 |
130 |
7 |
35 |
694 |
155 |
8 |
40 |
808 |
175 |
9 |
45 |
906 |
210 |
10 |
50 |
1363 |
230 |
Na podstawie pomiarów wykonano charakterystyki :
● napięcia zasilającego w funkcji częstotliwości ![]()
● prędkości obrotowej w funkcji częstotliwości ![]()
Wnioski .
Silniki indukcyjne cechuje stosunkowo niska cena , prostota budowy oraz obsługi .
Z tego powodu jest to najczęściej stosowany rodzaj silników w przemysłowych procesach technologicznych i układach automatyki .
Mają dobre właściwości ruchowe , a ich charakterystyki można kształtować przez zmianę warunków zasilania i przez zmianę impedancji zewnętrznej przyłączonej do uzwojeń maszyny .
Ważną zaletą silnika pierścieniowego jest zmiana początkowego momentu rozruchowego pod wpływem włączanej dodatkowej rezystancji w obwód wirnika. Zwiększanie rezystancji w obwodzie wirnika powoduje zmniejszenie prędkości obrotowej, a zwiększenie początkowego momentu rozruchowego. Początkowy moment rozruchowy wraz ze wzrostem rezystancji, przesuwa się w kierunku momentu krytycznego. Charakterystyka początkowego momentu rozruchowego zaczyna się od wspólnego punktu dla wszystkich wartości rezystancji, poniżej osi napięcia. Wartość ta określa jaki moment musi wytworzyć silnik aby pokonać straty mechaniczne. Straty mechaniczne w naszym przypadku są suma strat mechanicznych silnika pierścieniowego i prądnicy bocznikowej prądu stałego, która jest spięta razem z badanym urządzeniem.
Sprawność silników indukcyjnych jest wysoka , ale zmienia się wraz ze zmianą obciążenia .
Jedną z wad silników indukcyjnych jest mała możliwość regulacji prędkości obrotowej w porównaniu z innymi silnikami ( np. silnikami prądu stałego ). Dzięki zastosowaniu techniki półprzewodnikowej wyeliminowano tą wadę .
Silniki indukcyjne zasilane ze źródeł umożliwiających regulację częstotliwości napięcia zasilającego ( z falowników ) charakteryzują się płynną regulacją prędkości obrotowej w pełnym zakresie ich działania .
13
Badanie silnika indukcyjnego pierścieniowego
Wyszukiwarka
Podobne podstrony:
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie indukcyjnego silnika pierścieniowego v2, LABORATORIUM MASZYN ELEKTRYCNYCH
Silnik pierscieniowy
Pomiary parametrów silnika pierścieniowego
Sprawozdanie Silnik pierscieniowy Grzechu
Silnik pierścieniowy , Silnik indukcyjny pier˙cieniowy
Silniki spalinowe, 10.13-Wplyw utleniajacego reaktora katalitycznego na emisje silnika ZS, LABORATOR
Silnik pierścieniowy, Silnik 1f, POLITECHNIKA WARSZAWSKA
Wyznaczanie cha-ki silnika pierścieniowego, NAPED-~7, Politechnika Lubelska
ćw17 silnik pierścieniowy z modulatorem rezystancji
Rozruch silnika pierścieniowego
DRUTY, maszyny - Silnik asynchroniczny, LABORATORIUM ELEKTROTECHNIKI
Badanie asynchronicznego silnika pierścieniowego
Badanie silnika pierscieniowego, elektrotechnika
Badanie indukcyjnego silnika pierścieniowego v6
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
Badanie silnika pierścieniowego A4
więcej podobnych podstron