1. Co to są układy SCADA?
Są to systemy sterujące nadrzędnie i zbierające dane. Służą do obróbki informacji (bazy danych, archiwizatory). Układy te są w stanie pobrać dane dla użytkownika ( np. zużycie energii ) oraz umożliwiają wskazanie procesów awaryjnych.
2. Co to są sterowniki PLC?
Są to programowalne sterowniki logiczne, zawierające mikroprocesor, układ wejścia - wyjścia oraz pamięć ROM, do której wprowadzamy program.
3. Co to są regulatory dwustawne? Podać przykład
Regulatory dwustawne służą do stabilizacji (np. ciśnienia, temperatury)o charakterystyce przekaźnikowej, którego wyjście może przybrać tylko dwie wartości (0 lub 1 ). Stosuje się je tam gdzie występuje ubytek sygnału wyjścia. Działanie można śledzić na wykresach czasowych (np. „ubytek” malenie temp.) Przykład: zamykanie włącznika lub zaworu.
4. Co nam daje zastosowanie w regulatorze PID członu różniczkującego?
Człon różniczkujący przyspiesza reakcję układu w pierwszej chwili, ale generuje duże sygnały na wyjściu regulatora. Układ taki jest stabilny.
5. Co to jest regulator konwencjonalny PID? Wyjaśnić ten skrót.
Regulator konwencjonalny PID (Proporcjonalno-całkująco-różniczkujący) zwany klasycznym. W skład jego wchodzą człony: proporcjonalny, całkujący oraz różniczkujący.
6. Od czego zależy 100% dokładność statyczna w układzie regulacji?
Dokładność statyczna dotyczy stanu ustalonego. Określa zdolność układu regulacji do utrzymania wartości regulowanej. Miarą dokładności statycznej układu są wartości uchybu regulacji w stanie ustalonym, a więc 100 % dokładność jest gdy wartość uchybu ustalonego jest równa 0.
7. Jaki parametr charakteryzuje dokładność styczną?
eust - uchyb ustalony
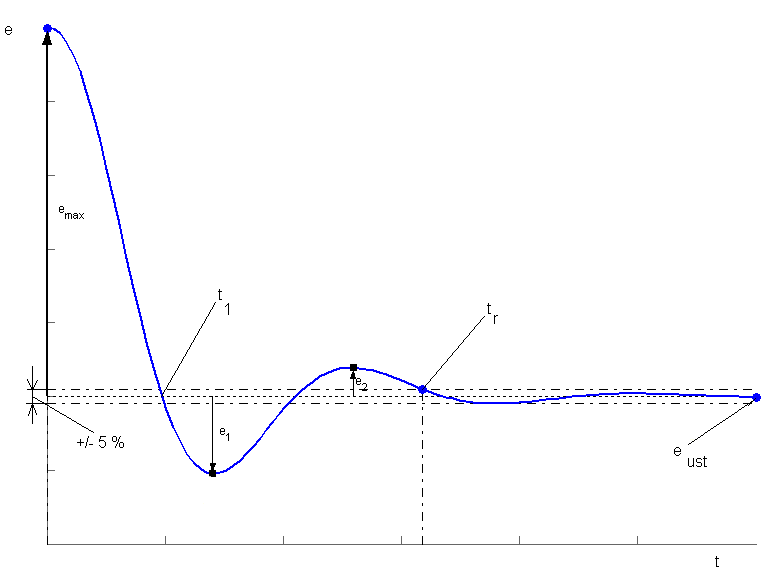
8. Narysować przebieg uchybu regulacji w czasie przy wymuszeniu w postaci skoku jednostkowego. Zaznaczyć na rysunku sposób określenia uchybu ustalonego i przeregulowania.
![]()
![]()
emax - uchyb maksymalny
eust - uchyb ustalony
t1 - czas po którym układ po raz pierwszy osiąga wartość ustaloną
tr - czas regulacji, po którym uchyb wchodzi w pasek +/- 5 % i już z niego nie wychodzi. przeregulowanie δ oscylacyjność
9. Czym różni się dokładność statyczna regulacji od dokładności dynamicznej?
Charakteryzując dokładność statyczną bierzemy pod uwagę jakość procesów regulacji w stanie ustalonym, przy różnych typowych wymuszeniach.
Dokładność dynamiczna charakteryzowana jest dla stanów przejściowych.
10. Co to jest stan ustalony w procesie regulacji?
To to czas, po którym uchyb ma stały poziom.
11. Co to jest stan przejściowy w procesie regulacji?
Jest to okres czasu, w którym wartość uchybu oscyluje w okolicach uchybu ustalonego (+/- 5 %) i nie przekracza tej wartości.
12. Czym charakteryzuje się stabilizacja?
Sygnał zadany jest stały. Jest to utrzymanie pewnej wielkości na określonym zadanym poziomie niezależnie od zakłóceń.
13. Czy obecność dynamiki członów wykonawczych i pomiarowych w układzie sterowania ułatwia czy utrudnia pracę regulatora?
Utrudnia pracę, gdyż układ robi się bardziej skomplikowany. Pogarsza się regulacja i sterowanie, poprzez fizyczne opóźnienia każdego członu.
14. Narysować podstawowy schemat blokowy zamkniętego układu regulacji opisać występujące w nim bloki i sygnały.
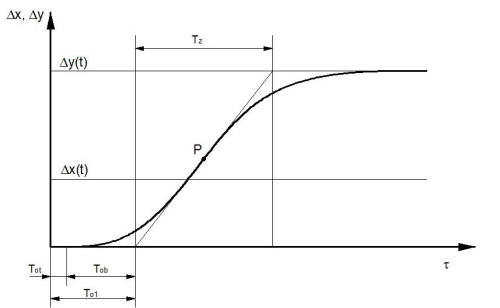
15. Pokaż na rysunku sposób wyznaczania parametrów transmitancji członu inercyjnego z opóźnieniem.
Wyznaczenie parametrów polega na poprowadzeniu stycznej do charakterystyki rzeczywistej w punkcie przegięcia, po czym styczna ta odcina na osi odciętych wartość T0 oraz pośrednio wartość T. Zwróćmy uwagę, że zastąpienie krzywej odpowiedzi rzeczywistej przez krzywą odpowiedzi członu zastępczego nie jest dokonywane optymalnie, lecz na zasadzie arbitralnej konstrukcji graficznej. Nie popełnia się tutaj błędu, gdyż aproksymacja charakterystyki obiektu przez charakterystykę zastępczą ma służyć do obliczeń całego układu regulacji, który na etapie analizy nie jest jeszcze znany.
16. Czy w metodzie charakterystyki skokowej można wyznaczyć parametry dowolnej transmitancji czy tylko niektórych?
17. Co to są metody podstawowe identyfikacji własności dynamicznych obiektu? Co do nich zaliczamy?
18. Jak objawia się niestabilność w sygnale wyjściowym obiektu?
19. Co to jest zapas modułu i zapas fazy? Do czego może by przydatny?
Współczynnik wzmocnienia k można, przez odpowiedni dobór jednostek wielkości wejściowej i wyjściowej, sprowadzić do jedności, wówczas, k=hu=1
20. Do jakich układów nie możemy stosowa kryterium NYQUISTA?
Kryterium to nie może być stosowane do układów otwartych.
21. Jeżeli stabilność możemy wnioskować na podstawie położenia biegunów transmitancji to,
po co potrzebne są kryteria stabilności?
Kryteria stabilności są potrzebne, gdy nie potrafimy wyznaczyć biegunów transmitancji, oraz gdy chcemy znać więcej informacji na temat układu, niż tylko jego stabilność.
22. Co to jest kryterium stabilności? Wymień przykładowe.
Kryterium stabilności jest to metoda pozwalająca rozstrzygnąć o tym czy układ jest stabilny czy też nie. Przykłady:
a) analityczne: - Hurwitza
- Routha
b) graficzne: - Nyquista
23. Które pierwiastki: licznika czy mianownika transmitancji decydują o stabilności obiektu? Uzasadnij odpowiedz.
O stabilności obiektu decydują pierwiastki mianownika transmitancji, ponieważ są to bieguny transmitancji, a to od ich położenia w płaszczyźnie zespolonej zależy stabilność układu.
24. Co to jest stabilność obiektu? Czy zależy ona od zewnętrznych sygnałów działających na obiekt?
Stabilność to zdolność układu do powracania do stanu równowagi po ustaniu przyczyny, która go ze stanu równowagi wytrąciła. Stabilność jest cechą wewnętrzną układu, nie zależy od sygnałów działających na układ.
Wyróżniamy 3 stany:
asymptotycznie statyczny, na granicy stabilności i niestabilny
25. Jaka jest główna różnica pomiędzy członem oscylacyjnym a pozostałymi, podstawowymi członami dynamicznymi? Rozważ rolę współczynnika tłumienia.
Główną różnicą jest to, że człon oscylacyjny ma transmitancję drugiego rzędu. Współczynnik tłumienia zawiera się w przedziale: 0 ≤ ζ ≤ 1. Dla 1 otrzymamy charakterystykę skokową jak dla członu inercyjnego, natomiast dla 0 charakterystyka skokowa jest falą sinusoidalną.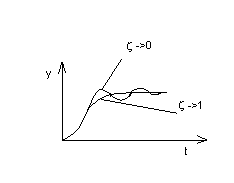
26. Podać ogólny wzór na transmitancję operatorową i narysować charakterystykę skokową członu oscylacyjnego.
![]()
gdzie: k - współczynnik wzmocnienia,
ξ - współczynnik tłumienia, ![]()
- stała czasowa
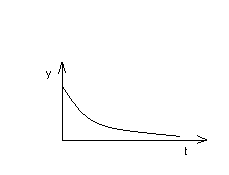
27. Podać ogólny wzór na transmitancję operatorową i charakterystykę skokową członu różniczkującego rzeczywistego.
![]()
gdzie: ![]()
- stała czasowa różniczkowania
T - stała czasowa
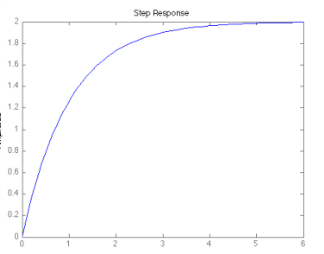
28. Podać ogólny wzór na transmitancję operatorową i charakterystykę skokową członu inercyjnego pierwszego rzędu.
![]()
29. Podać ogólny wzór na transmitancję operatorową i charakterystykę skokową członu inercyjnego pierwszego rzędu z opóźnieniem.
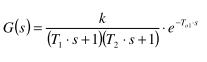
31. Podać ogólny wzór na transmitancję operatorową i charakterystykę członu inercyjnego II rzędu z opóźnieniem.
32. Wymienić podstawowe człony, elementy dynamiczne.
a) proporcjonalny
b) całkujący idealny
c) różniczkujący idealny
d) inercyjny
e) całkujący rzeczywisty
f) różniczkujący rzeczywisty
g) oscylacyjny
h) opóźniający
33. Co to jest rozkład zer i biegunów? Czy można z niego uzyskać transmitancję operatorową?
Jest to rozmieszczenie zer i biegunów na płaszczyźnie liczb zespolonych lub płaszczyźnie „s” gdzie: zero to miejsce zerowe licznika transmitancji, a biegun to miejsce zerowe mianownika transmitancji. W związku z powyższym, z rozkładu tego można uzyskać transmitancje operatorową.
34. Jakie informacje można uzyskać z charakterystyki częstotliwościowej?
Charakterystyki częstotliwościowe mówią o tym, na jakie sygnały (z jakiego pasma f) badany obiekt będzie reagował a dla jakich nie. Mówią one też o charakterystyce układu względem pasma przenoszenia sygnału.
35. Ile rodzajów charakterystyk częstotliwościowych występuje w opisie obiektów sterowania?
a) amplitudowa
b) fazowa
c) Nyquista
d) logarytmiczna
36. Co to jest charakterystyka skokowa?
Jest to odpowiedź układu na pobudzenie w postaci skoku jednostkowego.
37. Czy jeden obiekt może mieć wiele różnych modeli w postaci macierzy stanu? Uzasadnij odpowiedz.
Tak, gdyż opis za pomocą macierzy stanu nie jest jednoznaczny i zależy od wybranych zmiennych stanu.
38. Co to są zmienne stanu? Podaj podstawowe równania.
Zmienne stanu to zbiór wielkości fizycznych, które w pełni charakteryzują zachowanie badanego układu. Nie może być ich za mało, muszą w pełni opisywać układ.
x = Ax + Bu
y = Cx + Du
39. Jak można uzyskać transmitancje widmową mając transmitancję operatorową?
Jest to możliwe za pomocą równania: s=jw
40. Co to jest transmitancja operatorowa?
Jest to stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego, przy zerowych warunkach początkowych.
41. Co to jest transmitancja widmowa?
To stosunek wartości zespolonej odpowiedzi Y układu wywołanej wymuszeniem sinusoidalnym, do wartości zespolonej tego wymuszenia, w stanie ustalonym. Transmitancja widmowa opisuje odtwarzanie przez dany obiekt (układ) zmieniającego się sygnału wejściowego i można otrzymać ją przechodząc z transmitancji operatorowej przez podstawienie s = jω
42. Wymień graficzne sposoby opisu własności obiektu dynamicznego?
a) charakterystyka skokowa (czasowa)
b) charakterystyki częstotliwościowe
c) rozkład zer i biegunów
43. Wymień analityczne sposoby opisu własności obiektu dynamicznego, układu automatyki.
a) równania różniczkowe
b) transmitancje:
- La Place'a (operatorowa)
- Fouriera (widmowa)
c) zmienne stanu
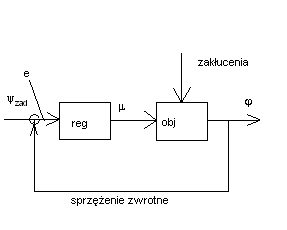
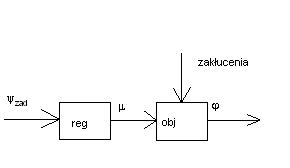
44. Narysuj zamkniętą strukturę sterowania. Opisz występujące bloki i sygnały.
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
e - uchyb regulacji
45. Narysuj otwartą strukturę sterowania. Opisz występujące bloki i sygnały.
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
46. Co to jest model matematyczny obiektu?
Jest to zbiór zależności matematycznych ( układów równań i/lub nierówności) opisujących zachowanie się badanego obiektu z pominięciem zbędnych dla rozpatrywanego problemu szczegółów.
47. Co to są zakłócenia?
Zakłucenia możemy podzielić na dwie grupy:
a) addytywne - takie, których skutki działania można zastąpić dodatkowym sztucznym sygnałem sterowania.
b) multiplikatywne - takie, które zmieniają właściowości układu, np. zmiana masy.
48. Co to jest skok jednostkowy? Sporządź rysunek.
Skok jednostkowy jest gwałtowną zmianą jednej wartości na drugą.
49. Co to jest skok impulsowy(impuls diraca)? Sporządź rysunek.
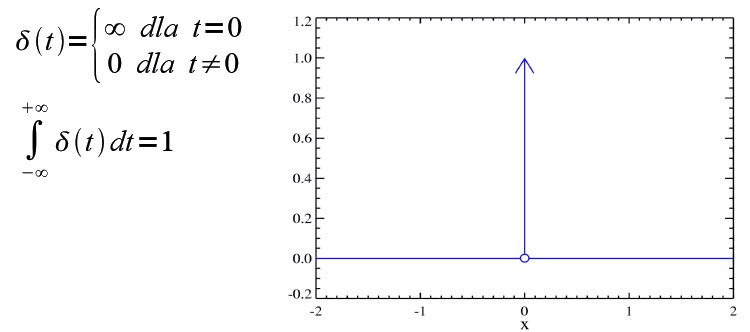
Delta Dirac'a (albo funkcja impulsowa) - δ to, obiekt matematyczny o następujących własnościach:
50. Wymień rodzaje układów sterowania.
W zależności od rodzaju aparatury sterującej mówimy o układach:
• mechanicznych,
• elektrycznych,
• hydraulicznych,
• pneumatycznych,
• mieszanych (elektromechanicznych, elektropneumatycznych, elektrohydraulicznych).
51. Co to jest regulator?
Regulator - jeden z elementów składających się na obwód regulacji. Zadanie regulatora polega na wygenerowaniu odpowiedniego sygnału sterującego, aby obiekt regulowany w jak najkrótszym czasie osiągał wartość zadaną.
Regulator służy do doprowadzenia obiektu do żądanego stanu lub poprawy niekorzystnych cech obiektu regulowanego. Regulator może np. poprawić dynamikę obiektu regulowanego (silnik będzie szybciej osiągał żądaną prędkość). Błędne użycie może prowadzić do niestabilności obwodu regulacji.
52. Co to jest obiekt sterowania?
Obiekt sterowania to jakiekolwiek urządzenie, układ lub element, na który chcemy oddziaływać lub chcemy nim sterować.
53. Co to jest wielowymiarowy układ sterowania ze sprzężeniem zwrotnym?
54. Wymień rodzaje robotów?
roboty odtwarzające,
roboty wyposażone w system sensoryczny,
roboty wyposażone w system wizyjny,
roboty o sterowaniu adaptacyjnym,
roboty inteligentne
55. Co to jest robot?
Obecnie „robotem” jest nazywany uniwersalny system techniczny zastępujący funkcje człowieka czyli połączenie funkcji inteligentnych i manipulacyjnych
56. Wymień 3 elementarne połączenia członów, występujące w układach automatyki?
Równoległe, szeregowe i połączenie członów w układzie ze sprzężeniem zwrotnym.
57. Podaj ogólne równanie Lagrange'a opisujące układy dynamiczne.
x = a (x') t + f (x')
58. Wymień elementy magazynujące energię potencjalną w układach automatyki.
Pojemność elektryczna, pojemność pneumatyczna, hydrauliczna, cieplna, mechaniczna sprężyn.
59. Wymień elementy magazynujące energię kinetyczną w układach automatyki.
indukcyjność, ruch prostoliniowy ciała o masie m, ruch obrotowy ciała o masowym momencie bezwładności „I”
60 Co to jest robot androidalny.
Robot androidalny jest to określenie definiujące sztuczne stworzenia humanoidalne (kształtem ciała podobne do człowieka). Robot w ludzkiej postaci, wyrażający emocje itp.
3
Wyszukiwarka
Podobne podstrony:
podstawyautomatyki, mechatronika, II rok, automatyka
02.Psychologia Zdrowia opracowanie(1), psychologia UŚ, II rok, I semestr, Prop. psychologii zdrowia
Cierpienia Młodego Wertera - Opracowanie, Filologia polska, II rok, Romantyzm
OPRACOWANIE ZIARNIAKOW EXTRA, II ROK STOMATOLOGIA SUM ZABRZE, MIKROBIOLOGIA, MIKROBIOLOGIA, mikroby
J.W. Goethe 'Faust'- opracowanie, Filologia polska, II rok, Romantyzm
Irydion (opracowanie)(1), Filologia polska, II rok, Romantyzm
OPRACOWANE ZESTAWY, Studia - II rok, Mikrobiologia, KOŁO 2
Godzina myśli - opracowanie, Filologia polska, II rok, Romantyzm
opracowanie kolokwium KRĄŻENIE, II rok, II rok CM UMK, Giełdy, od Joe, FIZJOLOGIA, KOLOKWIA, KRĄŻENI
Opracowanie hormonĂłw, Lekarski II rok ŚUM, II ROK, Biochemia z elementami chemii, Biochemia
socjologia - opracowane pytania, DIKS II rok semestr II, socjologia
TOB - Opracowanie2, AGH-IMIR, II rok
Opracowanie koducw4 (1), Mechatronika, Rok II, Semestr III, Elektronika, Lab
Automaty 2 by Endrju i Falu, AGH IMIR Mechanika i budowa maszyn, II ROK, Automatyka, Automaty
Automatyka- Regulator typu PID, II Rok Informatyka
pytania elektronika cw2, Automatyka i Robotyka PK, II rok, elektronika, Pytania do kolosów
więcej podobnych podstron