1. Podstawowe wielkości kinematyki Pojęcie ruchu
Aby opisać ruch jakiegokolwiek ciała, należy ustalić, jak zmienia się jego położenie względem innego ciała, które uznajemy za układ odniesienia.
Gdy taka zmiana położenia nie zachodzi, dane ciało znajduje się w spoczynku względem tych ciał (w tym układzie odniesienia).
Symbole wielkości kinematycznych i ich jednostki
v - prędkość (m/s - metr na sekundę)
a - przyspieszenie (m/s² - metr na sekundę do kwadratu)
s - droga (m - metr)
t - czas (s - sekundy)
Prędkość
Prędkość w ruchu prostoliniowym
Dla ruchu wzdłuż prostej prędkość definiuje się jako granicę przyrostów przesunięcia do przyrostu czasu w jakim nastąpił ten przyrost, dla malejących odcinków czasu. Prędkość ta zwana jest prędkością chwilową, w przeciwieństwie do prędkości średniej wyznaczonej na podstawie dłuższego odcinka czasu i drogi.
Prędkość średnia wektorowa
Prędkość wektorowa średnia określa szybkość zmiany wektora położenia w dłuższym czasie definiuje się jako:
Wynikającą z tego zmianę położenia określa wzór:
Prędkość jako wielkość niewektorowa
W wielu przypadkach prędkość rozumiana jest jako stosunek drogi do czasu jej przebycia. Tak jest rozumiana intuicyjnie, a także w wielu problemach fizycznych.
Przy czym droga jest rozumiana jako długość odcinka krzywej (toru), po której porusza się ciało, od punkt początkowego do końcowego ruchu.
Prędkość chwilowa:
Prędkość chwilowa niewektorowa jest równa modułowi (wartości) prędkości chwilowej wektorowej.
Prędkość średnia:
Średnia prędkość niewektorowa jest większa lub równa modułowi średniej prędkości wektorowej.
Przyspieszenie
Jeżeli dany wektor
określa położenie punktu materialnego, a wektor
określa prędkość tego punktu, to przyspieszenie
tego punktu jest pochodną prędkości po czasie:
A ponieważ prędkość jest pochodną położenia po czasie, to przyspieszenie można zapisać jako drugą pochodną położenia po czasie:
Jednostka przyspieszenia w układzie SI to metr na sekundę do kwadratu.
W ruchu prostoliniowym
W ruchu po linii prostej prędkość jest skalarem, wówczas przyspieszenie określa wzór:
Przyspieszenie w ruchu krzywoliniowym
W układzie odniesienia związanym z torem ruchu całkowite przyspieszenie jest rozbijane na dwie składowe: prostopadłą do toru ruchu zwane przyspieszeniem dośrodkowym (normalnym, ozn.
) i składową równoległą zwaną przyspieszeniem stycznym (ozn.
).
Wartość przyspieszenia całkowitego (długość wektora
) jest równa:
Wektor przyspieszenia całkowitego jest sumą składowej normalnej i stycznej:
Przyspieszenie dośrodkowe (normalne)
Jest to składowa przyspieszenia prostopadła do toru ruchu. Reprezentuje tę część przyspieszenia, która wpływa na kierunek prędkości, a zatem na kształt toru. Jeżeli prędkość chwilowa oznaczona jest jako v, a promień chwilowego zakrzywienia toru (promień okręgu stycznego do toru) ruchu wynosi r, to wartość an przyspieszenia dośrodkowego ciała jest równa:
Przyspieszenie styczne
Jest to składowa przyspieszenia styczna do toru ruchu, wpływająca na wartość prędkości. Stosując oznaczenie v dla wartości prędkości chwilowej i oznaczenie s dla drogi pokonanej przez ciało, przyspieszenie styczne aτ określają wzory:
Przyspieszenie kątowe
Występuje w ruchu obrotowym - jest wektorem leżącym na osi obrotu i skierowanym zgodnie z regułą śruby prawoskrętnej. Jeśli współrzędną kątową ciała określa kąt α, a wartość prędkości kątowej oznaczymy jako ω, to wartość przyspieszenia kątowego ε wynosi:
Jednostka przyspieszenia kątowego w układzie SI to jeden radian przez sekundę do kwadratu.
2. Przyspieszenie i jego składowe
Definicja:
Przyspieszenie a - przyrost prędkości dv w nieskończenie małej chwili czasu dt:
Czyli przyspieszenie z matematycznego punktu widzenia jest pochodną prędkości po czasie.
Jeżeli potraktujemy przyspieszenie jako sumę wektorową składowych ax, ay, az (a prędkość jako sumę vx, vy, vz) to każdą składową przyspieszenia możemy liczyć oddzielnie, gdyż pochodna sumy jest sumą pochodnych:
Innym podejściem do zagadnienia policzenia przyspieszenia a jest uznanie, że prędkość v składa się z wartości v i wersora τ określającego kierunek i zwrot przyspieszenia:
v = v τ
Teraz pochodną prędkości liczymy jako pochodną iloczynu a i τ:
Otrzymujemy w ten sposób przyspieszenie, jako sumę dwóch składowych:
Przyspieszenie styczne do toru ruchu - pierwszy człon powyższego wyrażenia; jest skierowany w tym kierunku, co porusza się ciało, jest odpowiedzialne za zmianę wartości prędkości ciała, a wartość tego przyspieszenia wynosi dv/dt;
Przyspieszenie dośrodkowe - drugi człon; jest skierowany prostopadle do ruchu, przez co nie zmienia wartości prędkości tylko jej kierunek; wartość tego przyspieszenia wynosi v2/R, gdzie R jest promieniem krzywizny, po której w danej chwili porusza się ciało.
3. Prawa dynamiki Newtona
I zasada dynamiki: (zasada bezwładności):Ciało, na które nie działają żadne siły, lub działają siły, których wypadkowa jest równa zero, pozostaje w spoczynku lub porusza się ruchem prostoliniowym ze stałą szybkością. Jest to zasada określająca warunki spoczynku lub ruchu jednostajnego prostoliniowego ciał.
II zasada dynamiki: Ciało pod wpływem działania siły doznaje przyspieszenia, którego kierunek z zwrot jest zgodny z kierunkiem i zwrotem działającej siły, a wartość proporcjonalna do iloczynu wartości siły i masy ciała: a = F/m Zasada ta mówi nam o ruchu zmiennym
Współczynnik proporcjonalności jest równy odwrotności masy ciała:
Zmiana pędu ciała jest proporcjonalna do działającej siły wypadkowej.
Przyspieszenie z jakim porusza się ciało jest proporcjonalne do działającej siły, a odwrotność masy jest współczynnikiem proporcjonalności. Kierunek i zwrot przyspieszenia jest zgodny z kierunkiem i zwrotem siły.
III zasada dynamiki (zasada akcji i reakcji):Jeżeli ciało A działa na ciało B pewną siłą, to ciało B działa na ciało A siłą o takiej samej wartości takim samym kierunku, lecz przeciwnym zwrocie. Siły te nie równoważą się, ponieważ mają różne punkty przyłożenia. Zasada ta mówi nam o wzajemnym oddziaływaniu dwóch ciał.
4. Siły i współczynnik tarcia
Tarcie jest zjawiskiem, które występuje na powierzchniach styku ciał materialnych. Działanie siły tarcia obserwujemy wtedy, gdy próbujemy przesunąć względem siebie stykające się ciała.
Siła tarcia Ft skierowana jest w przeciwną stronę i przeciwdziała sile działającej na ciało. Siła tarcia posiada wartość graniczną, zwaną siłą tarcia statycznego Fs. Jeśli jest ona większa od siły działającej na ciało, to ciało pozostaje w spoczynku. (0<F<Fs)
Jeśli siła F jest większa od siły tarcia statycznego Fs, to ciało zaczyna się poruszać ruchem jednostajnie przyśpieszonym. Przyspieszenie jest jednak mniejsze niż jakby działała tylko siła F, gdyż siła tarcia kinetycznego Fk przeciwdziała ruchowi.
m*a=F-Fk
F- siła działająca na ciało
Fk- siła tarcia kinetycznego
Wartość siły tarcia jest proporcjonalna do siły nacisku Fn działającej prostopadle do powierzchni i zależna jest także od własności trących się materiałów.
Ft=µ*Fn
µ- współczynnik tarcia statycznego/kinetycznego
Fn- siła nacisku
Ft- siła tarcia
Współczynnik tarcia statycznego można wyznaczyć za pomocą równi pochyłej.
Fs=m*g*sinα
Siła tarcia może być wyrażona za pomocą współczynnika tarcia, co można zapisać
Fs= µ* Fn= µ* m*g*cosα
Z tego wzoru można łatwo wyznaczyć współczynnik tarcia
µ=tgα
5. Relacje pomiędzy siła, pracą, mocą i energią
Praca - iloczyn skalarny wektorów: siły i przemieszczenia.
![]()
![]()
- kąt pomiędzy kierunkiem działania siły, a kierunkiem przemieszczenia. Kiedy kąt ten jest kątem ostrym, praca ma wartość dodatnią, kiedy rozwartym - ujemną; kiedy równy jest 90 stopni praca wynosi 0
Kiedy na ciało działa równocześnie kilka sił, to wypadkowa siła jest ich sumą wektorową.
Jednostką Pracy jest [dżul] 1J=Nm
Szybkość wykonywania pracy przez daną siłę charakteryzuje
Moc - praca wykonana w jednostce czasu
![]()
Powyższy wzór pokazuje, że moc wyrazić można także jako iloczyn skalarny wektora siły i wektora prędkości ciała, do którego siła ta jest przyłożona.
Jednostką mocy jest [wat] 1W=J/s
Energia to możliwość wykonania pracy, zaś praca wykonana nad ciałem zmienia jego energię.
Energia potencjalna ciała w danym punkcie, względem określonego punktu odniesienia, równa jest pracy jaką wykonują siły zachowawcze (siły, których praca wykonana przy przemieszczeniu ciała po torze zamkniętym o dowolnym kształcie równa jest zeru) przy przemieszczeniu ciała z danego punktu do punktu odniesienia.
![]()
Energia kinetyczna - energia ruchu, połowa iloczynu masy ciała i kwadratu jego prędkości
![]()
Związek pomiędzy pracą wykonaną nad danym ciałem, a zmianą jego energii kinetycznej możemy zapisać w postaci:
![]()
Twierdzenie o pracy i energii:
Praca wykonana przez wypadkową sił działających na ciało równa jest zmianie jego energii kinetycznej.
6. Prawa zachowania w mechanice
PRAWO ZACHOWANIA ENERGII
Całkowita energia mechaniczna ciała, na które działają tylko siły zachowawcze, jest stała.
![]()
Kiedy na ciało działają siły dyssypatywne (siły które nie spełniają warunku siły zachowawczej) zasada zachowania energii mechanicznej nie jest spełniona. Siły te zmieniają energie mechaniczna ciała. Następuje zmiana energii mechanicznej na inne rodzaje energii, np. energię cieplną, chemiczną, elektryczną itp.
PRAWO ZACHOWANIA PĘDU
Jeśli na układ nie działają siły zewnętrzne lub działa układ sił zrównoważonych, to pęd układu zachowuje stałą wartość.
Jeśli ![]()
to ![]()
Na szczególne podkreślenie zasługuje niezależność całkowitego pędu układu od wszelkich oddziaływań wewnętrznych pomiędzy jego elementami. Kiedy więc jakiś element układu uzyskuje pęd w wyniku zachodzących w układzie procesów, pozostała część układu uzyskuje pęd o tej samej wartości, lecz przeciwnie skierowany. To właśnie zachowanie pędu jest podstawą działania silników odrzutowych i rakietowych, jest też powodem odrzutu przy strzałach
7. Opis ruchów obrotowych
ruch obrotowy-ruch, w którym wszystkie punkty danego ciała poruszają się po okręgach, których środki znajdują się na jednej prostej zwanej osią obrotu. Ruch ten opisuje prędkość kątowa i wektor promienia wodzącego, który jest skierowany do osi obrotu poruszającego się punktu. Tak zdefiniowany wektor wodzący jest prostopadły do osi obrotu. Jednostką prędkości kątowej jest radian na sekundę.
Ruch obrotowy ze stałą prędkością kątową opisuje się także podając czas, w którym poruszające się ciało wykonuje jeden pełny obrót, czyli kiedy kąt obrotu wynosi
. Czas ten, oznaczany zwykle jako
, nosi nazwę okresu w ruchu obrotowym. Liczbę obrotów wykonanych przez ciało w czasie jednej sekundy, czyli odwrotność okresu, nazywa się częstotliwością i oznacza zwykle jako
lub
. Zapiszmy relacje pomiędzy tymi wielkościami.
jednostką okresu jest sekunda, jednostką częstotliwości jest jeden herc (Hz); jego wymiarem jest odwrotność sekundy.
Wielkością która dla ruchu obrotowego stanowi odpowiednik siły w ruchu postępowym jest moment siły. Moment siły zdefiniowany jest zawsze względem określonego punktu w przestrzeni, choć w czasie ruchu położenie tego punktu może się zmieniać.
Bezwzględna wartość momentu siły wynosi
Momentem bezwładności wyraża następujący wzór,
.
Kolejny ważny wzór:
Wyraziliśmy w ten sposób druga zasadę dynamiki poprzez związek pomiędzy momentem siły i pochodna momentu pędu względem czasu. Związek ten jest zwany drugą zasadą dynamiki ruchu obrotowego.
Energię kinetyczną ruchu obrotowego układu punktów materialnych wyrażamy wzorem
Kiedy promień wewnętrzny walca będzie równy zeru otrzymamy walec pełny. Otrzymujemy wzór na moment bezwładności pełnego walca względem osi przechodzącej przez środek walca wzdłuż jego wysokości:
Kiedy promień wewnętrzny stanie się bliski promieniowi zewnętrznemu mamy do czynienia z cienkościennym walcem, pierścieniem lub rurą. Otrzymujemy wtedy przybliżony wzór na moment bezwładności cienkościennego walca.
Twierdzenia Steinera.
jest to wzór określający moment bezwładności osi nie przechodzącej przez środek masy ciała. Jeśli na układ nie działają siły zewnętrzne, to zgodnie z zasadą zachowania momentu pędu, całkowity moment pędu układu pozostaje niezmieniony. Jeśli więc zmienia się moment bezwładności ciała (bez wpływu sił zewnętrznych), to musi zmienić się także prędkość kątowa, by moment pędu pozostał niezmieniony.
Moment pędu układu zamkniętego jest stały
8. Równanie ruchu harmonicznego i jego rozwiązanie
Każdy ruch powtarzający się w regularnych odstępach czasu nazywany jest ruchem okresowym. Jeżeli ruch ten opisywany jest sinusoidalną funkcją czasu to jest to ruch harmoniczny. Siła przywracająca ciało do położenia równowagi zależna jest od wielkości odchylenia i jeśli odkształcenia są doskonale sprężyste, wyrażona jest przez znane nam już prawo Hooke'a
W zależności tej F jest siłą, x - odchyleniem, czyli aktualnym położeniem ciała określonym względem położenia równowagi; k jest współczynnikiem proporcjonalności charakteryzującym własności sprężyny. Jeżeli współczynnik ten nie zmienia się w czasie ruchu, to wartość siły jest wprost proporcjonalna do wielkości odchylenia od położenia równowagi. Ruch odbywający się pod wpływem takiej siły nazywamy ruchem harmonicznym, a siły o tej własności nazywamy siłami harmonicznymi. Proporcjonalność siły do odchylenia jest najbardziej charakterystyczną własnością, wspólną dla wszystkich sił harmonicznych, mimo że siły te nie ograniczają się wyłącznie do sił sprężystości. Znak minus oznacza, że kierunek siły jest przeciwny do kierunku odchylenia.
Korzystając z drugiego prawa dynamiki możemy równanie ruchu ciała o masie m pod działaniem siły (6.1) zapisać następująco
Rozwiązanie ruchu.
Sprawdźmy więc, czy podany wyżej warunek będzie spełniony zakładając, że rozwiązanie ma postać:
gdzie A oraz , to wartości stałe, nie zmieniające się w czasie.
Liczymy pierwszą pochodną, czyli dx/dt. Zwróćmy uwagę, że pierwsza pochodna położenia po czasie to po prostu chwilowa prędkość ciała, .
Druga pochodna, czyli przyspieszenie ciała a, wynosi
Rzeczywiście, druga pochodna ma tę samą postać, co funkcja (4) ale wzięta ze znakiem minus i pomnożona przez 2 . Funkcja (4) jest więc rozwiązaniem naszego równania
9. Energia potencjalna i kinetyczna w ruchach harmonicznych
Jak wiadomo związek pomiędzy siłą F a zmianą energii potencjalnej dEp na odcinku drogi dx wyraża się:
lub
Siłę i odchylenie z położenia równowagi wyraża związek F = - k x. Energię potencjalną w punkcie x można wyznaczyć jako
, przyjmując że w położeniu równowagi (x=0), Ep(x)=0.
Energia kinetyczna ciała o masie m poruszającego się z prędkością u równa jest
Całkowita energia jest sumą energii potencjalnej i kinetycznej :
Podstawiając
i
otrzymujemy
.
Całkowita energia nie zależy ani od x ani od u i jest w każdej chwili, zatem i w każdym punkcie taka sama, wprost proporcjonalna do kwadratu amplitudy. Jest to konsekwencja zasady zachowania energii. Odchylenie ciała od położenia równowagi, to dostarczenie mu energii potencjalnej. Nie ingerując na ciało, uzyskana energia potencjalna zamieniana jest na energię kinetyczną. Gdy ciało minie położenie równowagi następuje sytuacja odwrotna. Ciało traci energię kinetyczną, zyskując tym samym energię potencjalną.
10. Typy ruchów harmonicznych i ich własności
Ruch harmoniczny swobodny.
Ciało porusza się ruchem harmonicznym prostym, jeżeli znajduje się pod wpływem siły o wartości proporcjonalnej do wychylenia z położenia równowagi i skierowanej w stronę położenia równowagi:
F=-kx
F- siła,
k - współczynnik proporcjonalności,
x- wychylenie z położenia równowagi.
Ruch harmoniczny tłumiony.
Ruch na ogół jest tłumiony wskutek oporu powietrza lub innych oporów występujących w układzie drgającym. Opory te są proporcjonalne do prędkości ciała.
Równanie ruchu drgań tłumionych:
F=-k*x-b(dx/dt)
b- współczynnik proporcjonalności
Ruch harmoniczny wymuszony.
Ruch można podtrzymywać poprzez przyłożenie zewnętrznej siły okresowej. Zasadniczą rolę w podtrzymywaniu tego ruchu odgrywa związek pomiędzy częstością oscylacji własnych układu, a częstością siły wymuszającej. Ruchy tego typu nazywamy oscylacjami lub drganiami wymuszonymi. Częstość tych drgań jest narzucona przez okresową siłę wymuszającą.
Równanie ruchu drgań harmonicznych wymuszonych.
Fw- siła wymuszająca
F0- amplituda
ωw- częstość
Charakterystyczne cechy drgań wymuszonych:
Układ drga z częstością siły wymuszającej i jest ruchem nie tłumionym.
Amplituda drgań zależy zarówno od współczynnika tłumienia, jak i od różnicy pomiędzy częstością drgań własnych układu i częstością siły wymuszającej.
Amplituda osiąga wartość nieskończoną kiedy brak jest tłumienia, a obie częstości są sobie równe, czyli częstość rezonansowa równa jest częstości drgań własnych układu. Dla wartości współczynników tłumienia różnych od zera amplituda osiąga największą wartość (czyli występuje rezonans) dla częstości określonych wzorem (6.39), a więc mniejszych od częstości drgań własnych.
11. Siły i ruch w układach nieinercjalnych
Układ poruszający się ze zmienna prędkością nazywamy układem nieinercjalnym. Dla układu ruchomego mającego przyspieszenie ao równanie ma postać
.
Siła FB jest konsekwencją przyspieszenia ao układu ruchomego względem układu nieruchomego. Ta pozorna siła
zwana jest siła inercji lub siłą bezwładności. Siły bezwładności występują tylko w układach nieinercjalnych.
Siły inercji w ruchu postępowym
W układzie ruchomym pojawia się siła bezwładności
, skierowana przeciwnie względem kierunku przyspieszenia układu ruchomego i jest proporcjonalna do jego wartości. To przyspieszenie właśnie jest przyczyną jej występowania. Siłę te zapisujemy:
Siła odśrodkowa w ruchu obrotowym
Siła bezwładności skierowana jest w stronę przeciwną do kierunku przyspieszenia. Siła ta nosi nazwe siły odśrodkowej
. Siła ta występuje we wszystkich ruchach po okręgu i krzywoliniowych.
|
Rys.7.4. Siła odśrodkowa na kuli ziemskiej |
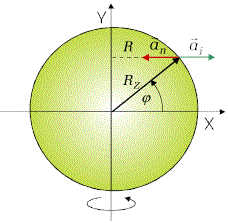
Jednym z takich ruchów jest ruch obrotowy naszej planety. W tym przypadku promień krzywizny ruchu po okręgu określony jest przez szerokość geograficzną w rezultacie czego wartość siły odśrodkowej będzie
|
(7.30) |
gdzie
jest promieniem Ziemi, a
jest szerokością geograficzną punktu na kuli ziemskiej. Zależności te ilustruje Rys. 7.4. Zwróćmy uwagę, że siła odśrodkowa nie jest skierowana od środka Ziemi, ale od jej osi obrotu. Siła ta jest największa na równiku, gdzie jej kierunek pokrywa się z kierunkiem siły grawitacji ale zwrot jest przeciwny. Siła odśrodkowa nie występuje na biegunach.
Siła Coriolisa
Na ciało poruszające się względem wirującego układu odniesienia działa jednak jeszcze jedna siła zwaną siłą Coriolisa.
Widać, że siła ta pojawia się jedynie, gdy ciało porusza się w układzie, który sam jest w ruchu obrotowym. Znak minus oznacza, jak i w poprzednich przypadkach, że siła ta jest skierowana przeciwnie do kierunku przyspieszania; jest bowiem siłą reakcji. Przyspieszenie to zależy jednak od relacji pomiędzy kierunkiem ruchu ciała w układzie ruchomym i kierunkiem prędkości kątowej układu ruchomego względem nieruchomego. Kiedy kierunki te są równoległe, siła Coriolisa wynosi zero, co wynika z własności iloczynu wektorowego.
13. Prawo powszechnego ciążenia i jego konsekwencje
Siła wzajemnego przyciągania dwóch punktów materialnych jest proporcjonalna do iloczynu ich mas i odwrotnie proporcjonalna do kwadratu ich odległości
1. Kule jednorodne ( taka sama gęstość ) :
Siła przyciągająca masy
działająca na masę
ma taką samą wartość, ale przeciwny zwrot
![]()
G - stała grawitacji
- wektor łączący środki kul
jest wersorem, czyli wektorem jednostkowym skierowanym tak samo jak wektor
.
2. Ciała niejednorodne ( różne gęstości ) :
Znając gęstości masy
i
możemy określić siłę oddziaływania grawitacyjnego pochodzącą od elementu ciała drugiego o objętości
na element ciała pierwszego o objętości
:
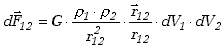
całkujemy po objętościach obu ciał :
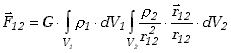
( jeśli wykonamy to całkowanie dla jednorodnych to nam da ten wzór z 1 pkt. )
Wyznaczenie stałej było trudne ale w końcu się udało :
![]()
Konsekwencje :
( konsekwencje to praktycznie cała reszta wykładu, więc wybrałem wg mnie najważniejsze, które i tak będzie można, chyba, napisać w skrócie )
1. Istnienie pola grawitacyjnego
Istnienie w przestrzeni pola grawitacyjnego oznacza, że na znajdujące się w nim ciała materialne działa siła wprost proporcjonalna do ich masy.
Dla ilościowego wyrażenia wielkości sił działających w danym polu wprowadza się wielkość wektorową
zwaną natężeniem pola :
![]()
jest siłą działającą na punkt materialny o masie
Kierunek siły jest przeciwny do kierunku wektora określającego położenie masy
względem masy
wytwarzającej pole. Więc jeżeli chcemy obliczyć natężenie zależnie od odległości masy ( r ) to podstawiamy sobie pod F :
![]()
Praca wykonana przez siły grawitacji przy przemieszczeniu masy
( ona jest w polu M ) od punktu
do punktu
nie zależy od drogi po której odbywało się przemieszczenie, a jedynie od różnicy odległości punktów od środka masy
wytwarzającej pole.
Wynika z tego, że praca równa jest różnicy energii potencjalnych masy
w punktach
i
Energia potencjalna wyznaczona do stałej dowolnej :
![]()
jeżeli
to ta energie potencjalna dąży do tej stałej więc zlewamy na nią i zostawiamy :
![]()
Dzięki temu wzorowi określamy energie potencjalną punktu o masie m oddalonego o r od punktu u masie M
( nie jestem pewien czy aż tak dokładnie - i tak mocno skrócone - trzeba o tym polu, więc do własnej decyzji ile z tego się uczysz )
2. Zasada równoważności
( jak zostanie czas to można o tym wspomnieć bo dosyć proste )
Zgodnie z prawem grawitacji, na ciało znajdujące się w pobliżu powierzchni Ziemi działa siła, której wartość wynosi :
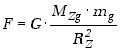
(
jest promieniem Ziemi a
i
masy grawitacyjne odpowiednio Ziemi i ciała )
Zgodnie z drugą zasadą dynamiki ma przyspieszenie :
![]()
(
masa bezwładna ciała )
Jeśli podstawimy siłę :
No i wynika, że 'masa bezwładna jest równoważna i równa masie grawitacyjnej' a co za tym idzie mamy zajebistą zasadę równoważności :
zjawisk wywołanych działaniem sił grawitacji nie można w skali lokalnej odróżnić od zjawisk wywołanych działaniem sił bezwładności
W dalszej konsekwencji zasada ta prowadzi do ogólnej teorii względności Einsteina.
3. Prawa Keplera
Siła grawitacji pełni funkcję siły dośrodkowej i właśnie dzięki temu planety krążą wokół Słońca. Przyjmując, że ruch odbywa się po orbicie kołowej możemy przyrównać siłę grawitacji do siły dośrodkowej otrzymując :
![]()
(
i
są odpowiednio masami planety i Słońca;
jest odległością planety od Słońca, a
okresem jej obiegu wokół Słońca )
Z tego wynika, że :
![]()
Stała ta nie jest zależna od masy planety więc relacja pomiędzy odległością planety od słońca i okresem jej obiegu może być zastosowana do dowolnej planety. Stosując ją dla dwóch planet otrzymujemy związek :

Czyli ogólnie ten gość pokazał, że dla dowolnych dwóch planet dostajemy ten związek, to wszystko wpisał w trzy prawa :
1. Planety poruszają się po torach eliptycznych. Słońce znajduje się w jednym z ognisk elipsy.
2. Promień wodzący planety zakreśla w tych samych przedziałach czasu te same pola.
3. Stosunek kwadratów czasów obiegu planet wokół Słońca równy jest stosunkowi trzecich potęg dużych półosi.
4. Prędkości kosmiczne
Pierwszy warunek :
![]()
(
jest masą ciała,
jego prędkością;
masą ziemi i
promieniem orbity )
( dla dociekliwych - kosmonauta wisi sobie na tle ziemi i kosmosu no i żeby mógł się poruszać po orbicie siła dośrodkowa - grawitacji musi być równa sile odśrodkowej )
Wyznaczamy prędkość :
![]()
Pierwszą prędkością kosmiczną nazywamy najmniejszą możliwą prędkość jaką musi mieć punkt materialny krążący wokół Ziemi na orbicie bliskiej promieniowi Ziemi, wychodzimy z :
![]()
i mamy pierwszą prędkość kosmiczną :
![]()
Najmniejszą prędkość, która umożliwia punktowi materialnego pokonanie siły grawitacji ziemskiej i oddalenie się w przestrzeń kosmiczną nazywamy drugą prędkością kosmiczną.
Energia potencjalna na powierzchni Ziemi odpowiada pracy potrzebnej na przeniesienie punktu materialnego z powierzchni Ziemi do nieskończoności. Praca ta może być wykonana kosztem energii kinetycznej wynikającej z prędkości ciała na powierzchni Ziemi.
![]()
i mamy wyrażenie na drugą prędkość kosmiczną :
![]()
No i jest trzecia i czwarta analogicznie opuszczenie układu słonecznego i drogi mlecznej ale to do napisania tylko jak chcesz ucieszyć Plute.
Ogólnie ciężko mi powiedzieć co będzie wymagał z tych konsekwencji, na pewno trzeba pamiętać o opisywaniu wszystkich symboli we wzorach.
14. Opis ruchów z prędkościami bliskimi prędkości światła
1. Transformacja Lorentza
Transformacja Galileusza ma określone granice stosowalności i dla dużych prędkości ( zbliżonych do prędkości światła ) zastępowana jest inną - Lorentza. Transformacja Lorentza dla małych prędkości przechodzi w transformacje Galileusza. Zapewnia ona stałą prędkość światła niezależnie od tego w którym układzie odniesienia prędkość jest rozpatrywana.
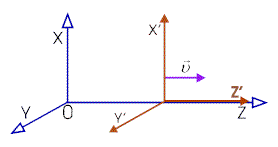
Dla przypadku, kiedy oba układy maja osie wzajemni równoległe i poruszają się w kierunkach uzgodnionych zwrotów osi Z i Z' transformacja ta określona jest wzorami :

analogicznie :

gdzie
.
kiedy
staje się bliskie zeru przechodzi ona w transformacje Galileusza
2. Skrócenie długości
Chodzi mniej więcej o to, że gdy umieścimy przykładowy pręt na osi Z układu w spoczynku ma on określoną długość ( l = z2 - z1 ).
Jeśli teraz w układzie poruszającym się będziemy chcieli mieć jego długość to bierzemy jego współrzędne w tej samej chwili ( t1' = t2' = t' ) i liczymy długość - będzie ona : l' = z2' - z1'
No i aby obliczyć tą długość podstawiamy to do transformacji Lorentza :

co daje :

![]()
( te wzory do uzyskania tego czynnika umieściłem żeby była spójność, raczej nie trzeba ich umieć )
jest tzw. czynnikiem Lorentza
ponieważ
Czynnik Lorentza równy jest jedności dla przypadku, kiedy prędkość równa jest zeru i zdąża do nieskończoności dla prędkości zbliżających się do prędkości światła.
Zauważamy, że długość pręta mierzona w układzie względem którego pręt się porusza jest mniejsza niż długość w układzie, w którym pręt spoczywa. Efekt ten nazywamy często "skróceniem Lorentza" albo kontrakcją długości. Największa długość pręta jest wtedy, kiedy mierzona jest w układzie, w którym pozostaje on nieruchomy. Długość tę nazywamy długością własną pręta. - czyli ogólnie jak patrzymy na długość pręta w układzie względem którego on się porusza to jest ona mniejsza niż ta cała własna pręta -
Efekt ten jest niezauważalny w świecie makroskopowym, bowiem wartość czynnika Lorentza jest praktycznie równa jedności dla wszelkich ruchów, które możemy obserwować bezpośrednio. Fizycy, zajmujący się oddziaływaniami cząstek elementarnych lub zderzeniami ciężkich jonów wysokich energii stosują transformację Lorentza przy wszelkich obliczeniach dotyczących ruchu tych obiektów mikroskopowych.
3. Dylatacja czasu
Wyraźmy położenie i czas w układzie własnym pasażera poprzez współrzędne i czas w układzie własnym mijanych stacji. Współrzędne pasażera
w jego własnym układzie równe są, oczywiście, zeru. Stosujemy transformację Lorentza
![]()
i tak dalej..
Ogólnie chodzi o to, że jak np. człowiek porusza się z prędkością bliską prędkości światła i mija punkty A i B to czas zmierzony u niego na stoperze między A i B jest krótszy niż czas zmierzony przez kogoś z boku jak mijał punkty A i B ( czyli np. u niego wyniosło 10 sek, a u tego z boku 12 sek ). Z tego wynika, że czas w tym układzie zapierdalającym mija wolniej. ( jakbyśmy mieli autobus co się porusza z prędkością prawie światła to byśmy mieli w chuj więcej czasu na naukę )
jest różnica czasu w układzie poruszającym się
jest różnicą czasu u kogoś z boku
Pamiętając, że
jest dla prędkości większych od zera większa od jedności widzimy, że
( czyli to co jest napisane na górze )
4. Równoważność masy i energii
Czyli, że masa podczas ruchu nie pozostaje stała ( nie tak jak w II zasadzie dynamiki Newtona ). W swej szczególnej teorii względności Einstein przyjął że masa ciała rośnie wraz ze wzrostem jego prędkości.
Masa relatywistyczna :
m0 nosi nazwę masy spoczynkowej, ponieważ m=m0 gdy prędkość równa jest zeru
![]()
Wielkość
nazywa się energią całkowitą, a
energią spoczynkową
No i mamy :
![]()
Uzyskaliśmy słynny związek Einsteina pokazujący równoważność masy relatywistycznej i energii całkowitej, która jest sumą energii kinetycznej i spoczynkowej. ( czyli piszemy słynny wzór, opisujemy m ze wzoru pierwszego opisujemy o co chodzi i jest cacy )
energia spoczynkowa - energia odpowiadająca masie ciała będącego w spoczynku Równa jest masie ciała pomnożonej przez kwadrat prędkości światła; E0=m0c2.
energia całkowita - pełna energia ciała z uwzględnieniem energii spoczynkowej i relatywistycznego wzrostu masy E=mc2.
( jest jeszcze czterowektor pędu ale myślę, że napisanie tego co tutaj zaspokoi Plute )
15. Prawo Bernoulliego i jego konsekwencje
Równanie (założenia: ciecz lepka, nieściśliwa, przepływ stacjonarny i bezwirowy):
Gdzie: ρ - gęstość cieczy (gazu), v - prędkość przepływu, g - przyspieszenie ziemskie, h - zmiana wysokości, na której znajduje się ciecz, p - ciśnienie cieczy.
Równanie to bierze się z zasady zachowania energii w przepływie cieczy.
Pierwszy człon oznacza ciśnienie dynamiczne (związane z przepływem cieczy), drugi człon jest ciśnieniem hydrostatycznym (związanym z tym, że ciecz posiada masę, stąd również energię potencjalną), trzeci człon - p jest ciśnieniem zewnętrznym (wytwarzanym przez ścianki naczynia).
Suma wszystkich tych ciśnień jest stała.
Równanie Bernoulliego pozwala wyjaśnić wiele zjawisk: dlaczego w rysunku poniżej w objętości A1 jest ciśnienie mniejsze niż w A2.

Po prostu w A1 ciśnienie dynamiczne jest większe (ciecz płynie szybciej) niż w A2, więc żeby suma wszystkich ciśnień była stała to p2 musi być większe od p1. (Różne wysokości h zaniedbujemy).
Ciekawostka: Dzięki zachodzeniu prawa Bernoulliego samoloty mogą latać.
16. Pierwsza zasada termodynamiki i podstawowe procesy cieplne
Pierwsza zasada termodynamiki:
Przyrost energii wewnętrznej układu przy przejściu ze stanu początkowego do końcowego równy jest sumie dostarczonej do układu energii cieplnej, wykonanej nad układem pracy oraz energii uzyskanej wskutek wymiany materii z otoczeniem. Przyrost ten nie zależy od sposobu, w jaki dokonuje się przejście, a określony jest całkowicie przez początkowy i końcowy stan układu.
zmiana energii wewnętrznej układu, który przechodzi ze stanu o energii wewnętrznej
do stanu o energii wewnętrznej
.
Zmiana ta może zachodzić na kilka sposobów:
przez wykonanie pracy
nad układem lub przez układ nad otoczeniem,przez wymianę ciepła
między układem i otoczeniem,przez wymianę materii
pomiędzy układem, a otoczeniem.
Zasada ta oznacza, że kiedy stan początkowy pokrywa się ze stanem końcowym, to suma składników po prawej stronie wzoru jest równa zeru. W konsekwencji, praca wykonana przez układ
|
|
jest tylko wtedy różna od zera, kiedy do układu dostarczana jest energia z otoczenia
Kiedy układy nie wymieniają materii z otoczeniem (
) zmiana energii wewnętrznej układu
równa jest w tym przypadku sumie wymienianego z otoczeniem ciepła
i pracy wykonanej nad układem lub przez układ nad otoczeniem
|
Kilka podstawowych procesów cieplnych:
Przemiana izochoryczna
Proces, w którym objętość układu pozostaje stała, czyli
, nazywamy przemianą izochoryczną. W przemianie tej układ nie wykonuje pracy nad otoczeniem, więc w oparciu o pierwszą zasadę termodynamiki mamy dla przemiany izochorycznej relację
|
(11.18) |
co oznacza, że w przemianie izochorycznej możemy zmienić energię wewnętrzną układu jedynie na drodze wymiany ciepła.
Pojemność cieplna substancji w procesie przebiegającym bez zmiany objętości wyraża się wzorem
|
Przemiana izotermiczna
Jeśli dany proces zachodzi w stałej temperaturze, czyli
, to mówimy, że zachodzi przemiana izotermiczna. Z równania stanu gazu wynika natychmiast, że w przemianie tej ciśnienie gazu jest odwrotnie proporcjonalne do jego objętości, bowiem dla danej masy gazu wyrażonej w molach mamy
W przemianie izotermicznej T=const, więc dU=0 . Oznacza to, że w przemianie tej układ ma ciągle taką samą energię wewnętrzną.
Przemiana izobaryczna
Jeśli proces zachodzi pod stałym ciśnieniem, czyli
, to mówimy, że zachodzi przemiana izobaryczna. Układ wykonuje dodatnią prace nad otoczeniem W'- rozszerzając się lub ujemną - kurcząc się. Ciśnienie zachowuje stałą wartość więc praca wykonana nad układem w przemianie izobarycznej wynosi
Podwyższenie temperatury o jeden stopień wymaga więcej ciepła niż w przypadku ogrzewania bez zmiany objętości, bowiem część ciepła zużywana jest na wykonanie pracy.
W procesie izobarycznym zmieniają się wszystkie funkcje termodynamiczne, a więc energię wewnętrzna możemy zmienić zarówno na drodze wykonania pracy jak i wymiany ciepła.
17. Statystyczny opis ciśnienia i temperatury
W pierwszej części naszych rozważań sformułujemy prawa obowiązujące dla tzw. cieczy doskonałej, tj. nieściśliwej i nielepkiej. W wielu przypadkach rozważania nasze możemy też zastosować do gazów - tam, gdzie ich ściśliwość nie odgrywa istotnej roli. Rozpoczniemy od zagadnień statyki płynów.
|
Omawiając własności sprężyste ciał stałych mówiliśmy o naprężeniach stycznych i normalnych, czyli równoległych i prostopadłych do powierzchni ciała. Możliwość swobodnego przemieszczania się cząsteczek płynu sprawia, że płyn nie może jednak równoważyć siły stycznej. Oznacza to, że w przypadku nieruchomych płynów siły powierzchniowe są prostopadłe do powierzchni płynu. |
|
Rys. 9.1. Siły działające na ciało zanurzone w płynie są prostopadłe do jego powierzchni. |
Siłę
działającą prostopadle na daną powierzchnię
nazywamy siłą parcia lub parciem, zaś siłę działającą na powierzchnię jednostkową nazywamy ciśnieniem
. Między tymi siłami jest więc prosty związek
|
(9.1) |
Jednostką ciśnienia jest paskal (Pa) i równy jest ciśnieniu jakie wywiera siła parcia jednego niutona na powierzchnie jednego metra kwadratowego:
|
(9.2) |
Do nieściśliwych cieczy stosuje się znane ze szkolnego kursu fizyki prawo Pascala
Ciśnienie wywierane na ciecz przenosi się jednakowo we wszystkich kierunkach i w całej objętości cieczy ma jednakową wartość .
Prawo to jest podstawą działania pras hydraulicznych i wielu innych urządzeń przenoszących znaczne siły przy zachowaniu we wszystkich punktach układu tego samego ciśnienia. Ze wzoru (9.1) wynika bowiem, że jeśli w układzie panuje ciśnienie
, to siły parcia wywierane na powierzchnie
i
wynoszą
|
(9.3) |
W prasach hydraulicznych
jest znacznie większe od
.
Prawo Pascala opisuje przenoszenie się ciśnienia zwanego ciśnieniem statycznym. Na każdy element cieczy działa jednak także siła grawitacji i wynikające stąd ciśnienie hydrostatyczne. Nietrudno jest określić to ciśnienie pamiętając, że na dowolnie wyróżnioną powierzchnię w cieczy działa z góry siła równa ciężarowi tejże cieczy czyli
, gdzie
jest głębokością liczoną względem poziomu cieczy,
jest gęstością cieczy a
jest przyspieszeniem ziemskim.. Ciśnienie hydrostatyczne wynosi wiec
|
(9.4) |
Jeśli na całą objętość cieczy działa też ciśnienie statyczne
, na przykład ciśnienie atmosferyczne, to sumaryczne ciśnienie wyniesie
|
(9.5) |
|
Wyróżnijmy w objętości cieczy prostopadłościan o wysokości |
|
|
|
(9.6) |
|
Siłę tę równoważy skierowana w dół siła ciężaru samej cieczy zawartej w wyróżnionej objętości |
|
Rys. 9.1. Wartość siły wyporu |
|
|
|
|
(9.7) |
|
W rezultacie, ciecz pozostaje w spoczynku, czego należało oczekiwać. |
|
Kiedy jednak objętość
stanowi zanurzone w cieczy ciało o ciężarze
różnym od
, to działająca w dół siła różni się od siły wyporu. Różnica tych sił
|
(9.8) |
może być dodatnia, równa zeru bądź ujemna. Tym trzem przypadkom odpowiadają trzy możliwości - ciała pływają w cieczy, pozostają na danej głębokości całkowicie zanurzone lub toną.
Wzór (9.8) wyraża sformułowane przez Archimedesa (287 - 212 p.n.e.) prawo
Na ciało zanurzone w cieczy działa siła wyporu równa ciężarowi cieczy wypartej przez to ciało.
Ciśnienie
|
Czym jest ciśnienie gazu z mikroskopowego punktu widzenia?
Ścianki naczynia zawierającego pewną porcję gazu uderzane są ustawicznie przez cząsteczki będące w chaotycznym ruchu. Wyznaczmy przekaz pędu przy takich zderzeniach. Dla uproszczenia przyjmijmy, że naczynie ma kształt sześcianu o długości ścianek równej |
Rys. 12.1. Cząsteczki gazu w sześciennym naczyniu. |
|
Prędkość cząsteczki w układzie współrzędnych prostokątnych zapiszemy w postaci
|
(12.1) |
|
W wyniku sprężystego zderzenia cząsteczki ze ścianką prostopadłą do osi |
|
|
|
(12.2) |
|
Dalsze nasze rozważania dotyczyć będą tylko kierunku |
|
|
|
(12.3) |
Pęd przekazany ściance będzie odwrotnego znaku, a więc wyniesie
.Czas przelotu cząsteczki przez kostkę wynosi
zaś przelot w obie strony trwać będzie dwa razy dłużej;
. Częstość
uderzeń o ściankę, czyli liczba uderzeń w jednostce czasu będzie odwrotnością czasu przelotu cząsteczki w dwie strony czyli
. Pęd przekazany ściance w jednostce czasu równy będzie pędowi przekazanemu w jednym uderzeniu pomnożonemu przez liczbę uderzeń w jednostce czasu.
|
(12.4) |
Z drugiej zasady dynamiki wiemy, że
. Pamiętamy też, że ciśnienie jest stosunkiem siły do powierzchni, na którą siła działa . Powierzchnia ta jest w naszym przypadku równa kwadratowi długości ścianki. Ciśnienie będące skutkiem uderzeń jednej cząsteczki w ściankę wynosi więc
. Sumując przyczynki od wszystkich uderzających w ściankę cząsteczek i dzieląc przez jej powierzchnię otrzymujemy wyrażenie na ciśnienie gazu działające na ściankę
|
(12.5) |
Założyliśmy tu, że wszystkie cząsteczki mają tę samą masę
. Długość ścianki w trzeciej potędze zamieniliśmy objętością sześcianu
. Iloczyn masy cząsteczki przez liczbę cząsteczek jest masą gazu w naczyniu, zaś podzielony przez objętość jest gęstością gazu, którą oznaczyliśmy symbolem
. Symbol
oznacza wartość średnią kwadratu składowej wektora prędkości wzdłuż osi
.
Biorąc pod uwagę, że kwadrat wektora równy jest sumie kwadratów jego składowych
i pamiętając, że wszystkie kierunki wektora prędkości są tak samo prawdopodobne oraz, że ruchy w każdym kierunku są niezależne - możemy zamienić wartość średnią kwadratu składowej przez wartość średnią kwadratu wektora prędkości, czyli
|
(12.6) |
Ostatecznie otrzymujemy wzór wyrażający związek pomiędzy mikroskopowymi (średnia prędkość cząsteczek) i makroskopowymi (ciśnienie i gęstość) własnościami gazu
|
(12.7) |
W naszych rozważaniach nie uwzględnialiśmy zderzeń pomiędzy cząsteczkami. Zwróćmy jednak uwagę, że w zderzeniach sprężystych jest zachowany pęd oraz energia kinetyczna, a więc zderzenia te nie będą wpływać na wartość średnią pędu przekazywanego ściankom naczynia. Wybraliśmy także regularny (sześcienny) kształt naczynia. W warunkach równowagi ciśnienie wywierane na wszystkie ścianki o dowolnym kształcie a także wewnątrz naczynia jest jednakowe, o czym wiemy z prawa Pascala. Rozważania nasze mają więc ogólny charakter.
Temperatura
Dla znalezienia związku pomiędzy makroskopową i mikroskopową interpretacją temperatury pomnóżmy lewą i prawą stronę równania (12.7) przez objętość naczynia
i porównajmy to z równaniem stanu gazu doskonałego
|
(12.8) |
We wzorze tym iloczyn gęstości i objętości jest po prostu masą gazu, którą następnie wyraziliśmy w molach oznaczając przez
jego masę molową.
Mnożąc stronami przez 3/2 i dzieląc przez liczbę Avogadro otrzymujemy
|
(12.9) |
Zauważamy przy tym, że masa molowa podzielona przez liczbę Avogadro to po prostu masa jednej cząsteczki
. Iloraz stałej gazowej i liczby Avogadro, to stała Boltzmanna
, którą wprowadziliśmy wzorem (11.14). Stała ta ma sens stałej gazowej odniesionej do jednej cząsteczki. Jak zobaczymy, stała ta odgrywa fundamentalna rolę w fizyce.
Wykorzystując wprowadzone oznaczenia możemy przepisać równanie (12.9) w postaci
|
(12.10) |
Wyrażenie po lewej stronie jest wielkością mikroskopową - średnią energią kinetyczną chaotycznego ruchu cząsteczek gazu, wyrażenie po prawej stronie jest proporcjonalne do wielkości makroskopowej - temperatury bezwzględnej ciała. Stwierdzamy więc że,
temperatura jest miarą średniej energii kinetycznej chaotycznego ruchu cząsteczek.
Średnia wartość kwadratu prędkości wynosi
|
(12.10a) |
Na tej podstawie możemy określić tzw. średnią prędkość kwadratową definiując ją jako
|
|
19. Siły sprężystości
Podstawową cechą sił sprężystości jest proporcjonalność siły do odkształcenia. Siły te pojawiają się kiedy ciało ulega deformacji(zmiana kształtu ciała/jego rozmiarów- ściskanie, rozciąganie, zmiana objętości, itp.) Ciało nazywamy doskonale sprężystym jeśli po ustąpieniu sił deformujących wraca całkowicie do postaci pierwotnej.
Opis deformacji ciał: q=F/S
q- naprężenie
F- wartość siły
S- jednostka powierzchni ciała
Naprężenie normalne - siła prostopadła do powierzchni ciała
Naprężenie styczne /ścinające - siła jest styczna do powierzchni
Deformacja ciała - względna zmiana rozmiarów, lub odkształcenia jego postaci.
Prawo Hooke'a mówi że w przypadku deformacji sprężystej naprężenie jest proporcjonalne do def. Względnej.
Q=K* (delta x /x) Delta x - zmiana długości/objętości/kształtu Delta x/x - stosunek bezwzględnej deformacji K - moduł sprężystości
Moduł Younga E - w przypadku ściskania/rozciągania - zmiana rozmiarów liniowych, miara deformacji - przyrost względny(zmniejszenie) długości ciała (delta l/l)
Q= E*(delta l/l)
Zmniejszeniu, zwiększeniu podłużnych rozmiarów ciała, towarzyszy skrócenie/rozszerzenie poprzeczne, które opisuje współczynnik Poissona u.
Delta d/d - względna zmiana rozmiarów poprzecznych U= (delta d/ d)/ (delta l/l)
Zależność między naprężeniem a wydłużeniem względnym. O-A liniowy związek pom. Naprężeniem a wydłużeniem. A-B brak liniowości, pkt B wyznacza granicę sprężystości, max. Naprężenie przy którym ciało wraca do swej pierwotnej postaci. B-C płynięcie materiału, wydłużenie wzrasta pomimo braku wzrostu naprężenia. PkT - największe wydłużenie.
Ruchy odbywające się pod wpływem sił sprężystości, odgrywają niezwykle ważną rolę w fizyce i technice. Należą do klasy ruchów harmonicznych.
20. Prawo zachowania momentu pędu i jego konsekwencje
Zasada zachowania momentu pędu - moment pędu układu, na który nie działa moment sił zewnętrznych pozostaje stały.
Moment pędu układów symetrycznych (lub składowa równoległa do osi obrotu układów dowolnych) jest iloczynem momentu bezwładności ciała i jego prędkości kątowej. Jeśli zmienia się moment bezwładności ciała, to musi się zmienić prędkość kątowa, by moment pędu pozostał niezmieniony.
Momenty działających sił i momenty pędu określamy, oczywiście, względem tego samego punktu. Indeks "zewn" przy wypadkowym momencie siły oznacza, że podobnie jak w przypadku drugiej zasady dynamiki dla układu punktów materialnych, także tutaj uwzględniamy wzajemne znoszenie się momentów sił działających pomiędzy punktami układu. Symbol oznacza wektor całkowitego momentu pędu układu. W ten sposób uzyskujemy drugą zasadę dynamiki dla ruchu obrotowego układu punktów materialnych.
Mz= dL/dt
Mz- moment sił zew., Dl-pochodna momentu pędu, dt - pochodna czasu (druga zasada dynamiki ruchu obrotowego)
Moment pędu układu zamkniętego jest stały.
Zapiszmy moment pędu względem punktu O dla danego punktu P w postaci.
Wektory położenia i prędkości są prostopadłe, wiec w postaci skalarnej zależność tą możemy wyrazić w formie
gdzie p jest odległością danego punktu od osi obrotu. Z relacji geometrycznych pokazanych na rysunku widzimy, że składowa wektora momentu pędu Lz równoległa do osi Z wynosi:
gdzie jest momentem bezwładności całego układu względem zadanej osi obrotu. Zauważmy, że składowa ta nie jest zależna od położenia punktu na osi O obrotu.
Jeśli układ punktów materialnych jest ciałem sztywnym, to nasze rozumowanie pozostaje w mocy. Jeśli jest układem symetrycznym względem osi obrotu, to całkowity moment pędu będzie równoległy do osi obrotu i zgodny z kierunkiem wektora prędkości kątowej. Mamy wtedy
Wyszukiwarka