1.Podstawowe oddziaływania w przyrodzie: Oddzialywanie grawitacji - jest zjawiskiem naturalnym polegającym na tym, że wszystkie obiekty posiadające masę oddziaływują na siebie wzajemnie przyciągając się.We współczesnej fizyce grawitację opisuje ogólna teoria względności. Oddziaływanie grawitacyjne jest w niej skutkiem zakrzywienia czasoprzestrzeni przez różne formy materii. F=d/dt Oddziaływanie słabe - przenoszone jest za pomocą jednej z trzech masywnych cząstek: bozonów naładowanych (W+ i W-) oraz bozonu neutralnego (Z0). Jest odpowiedzialne za rozpad beta i związaną z nim radioaktywność oraz za rozpad np. mionu i cząstek dziwnych. Siła oddziaływania słabego jest 109 razy mniejsza niż siła oddziaływania silnego. Jest zbyt słabe, by połączyć leptony w większe cząstki, tak jak oddziaływania silne łączą w hadronach kwarki. Oddziaływanie elektromagnetyczne - Teoria oddziaływań elektromagnetycznych powstała z unifikacji teorii magnetyzmu i elektryczności, dokonanej przez Maxwella. Centralną rolę w tej teorii odgrywa pojęcie pola elektromagnetycznego. Zachowanie pola elektromagnetycznego opisane jest równaniami Maxwella, zgodnymi (pomimo że powstały wcześniej) ze szczególną teorią względności. Oddziaływanie silne - Spośród cząstek elementarnych silnie oddziałują tylko kwarki, antykwarki i gluony. Oddziaływanie to wiąże kwarki w obrębie hadronów. Oddziaływanie silne zachodzi pomiędzy dwoma kwarkami poprzez wymianę cząstek zwanych gluonami przenoszących jednocześnie ładunki kolorowe i antykolorowe. Istnieje osiem różnych gluonów. Oddziaływanie silne ma także zaskakującą właściwość: jego siła rośnie wraz ze wzrostem odległości między kwarkami.
2.Układ jednostek SI:
- podstawowe jednostki:
Długość 1 m
Masa 1 kg
Czas 1 s
Natężenie 1 A
Temperatura 1 K
Światłość 1 cd (kandela
- uzupełniające jednostki:
Kąt płaski 1 rd (radian) - 360o = 6,28 rd = 2π
Kąt bryłowy 1 sr (steradian)
Ilość materii 1 mol.
3.Wektory i skalary:
Wektory i skalary
Przemieszczenie - zmiana położenia cząstki.
Wektor AB - cząstka przesuwa się z położenia A do B,
Kierunek i zwrot wektora AB - ruch cząstki zaczął się w pkt. A, a skończył w
pkt. B (rys.1).
Odcinek AB - przedstawia tylko przemieszczenie jako stan końcowy, nie wnikając w przebieg ruchu (droga cząstki nie musi być linią prostą).
Wektory - wielkości, które mają zarówno wartość liczbową, kierunek i zwrot (graficzne przedstawienie - strzałka).
Metoda geometryczna - dodawania wektorów
Zasady: rysujemy przemieszczenie a, a następnie przemieszczenie b tak, aby początek wektora b stykał się z końcem a - wektor wypadkowy c - suma wektorów a+b.
Odejmowanie wektorów - jako oddzielne działanie nie występuje.
Przyjmuje się, że wektor (-a) ma tę sama wartość liczbową, lecz jest przeciwnie skierowany niż odpowiedni wektor (a).
Własności dodawania wektorów (rys. 3):
1) a + b = b + a
2) (d + e) + f = d + (e + f)
3) a - b = a + (-b)
SKŁADOWE:
DŁUGOŚĆ I KĄT:

WEKTOR:
![]()
DODAWANIE WEKTORÓW:
![]()
MNOŻENIE WEKTORÓW
![]()
Mnożenie przez skalar:
Iloczyn skalarny dwóch wektorów jest iloczynem bezwzględnym jednego wektora przez wartość bezwzględną składowej drugiego wektora w kierunku pierwszego
![]()
Cos fi to kąt zawarty pomiędzy wektorem a i b.
Iloczynem wektorowym dwóch wektorów a i b czyli a x b jest trzeci wektor c
kierunek wektora c jest prostopadły do płaszczyzny wyznaczonej przez a i b, jego zwrot wyznacza reguła śruby prawoskrętnej.
Wektory: posiadają kierunek
Skalary: mają wartość liczbową, oraz jednostkową, spełniają prawa arytmetyki i algebry.
4.Ruch prostoliniowy jednostajnie przyspieszony.
W ruchu prostoliniowym - prędkość i przyspieszenie można wyrazić w następujący sposób:
![]()
s-odcinek
przebytej drogi
a) ruch prostoliniowy jednostajny
![]()
b) ruch prostoliniowy jednostajnie przyspieszony (a>0) i opóźniony (a<0)
![]()
Szczególne przypadki ruchu jednostajnie przyspieszonego:
-spadek swobodny:
![]()
-rzut pionowy w dół:
![]()
-rzut pionowy w góre:
![]()
-rzut poziomy;
![]()
5. Zasady dynamiki ruchu postępowego:
Dynamika - informuje, że aby znać przyspieszenie (a), trzeba znać siłę (F) działającą na cząstkę oraz masę cząstki (m), czyli bada siły i ich źródła tzn. bada oddziaływania między ciałami powodujące zmiany ruchu.
Dynamika zajmuje się przyczyną ruchu (duże masy, małe prędkości v<<c), tzn:
-Mamy ciało o masie m,
-Ciału nadajemy prędkość początkową v0 w otoczeniu, które znamy,
-Pytanie - jaki będzie ruch ciała?
I zasada - PRAWO BEZWŁADNOŚCI
Ciało pozostaje w stanie spoczynku lub porusza się ze stałą prędkością (v = const, a = 0), gdy działa na nie siła wypadkowa równa zeru.
![]()
Ciało pozostaje w spoczynku lub porusza się ruchem jednostajnie prostoliniowym (v = const, a = 0), dopóki działanie na niego innych ciał nie spowoduje zmiany tego stanu.
Zasady dynamiki Newtona spełnione są w układach inercjalnych, tj. w układach poruszających się ruchem jednostajnym prostoliniowym względem układu nieruchomego.
Jeżeli chcemy stosować zasady dynamiki w układach nieinercjalnych, konieczne jest uwzględnienie sił bezwładności (pozornych),
np. obserwator w jadącym pociągu lub windzie (ruch postępowy), siły odśrodkowej i Coriolisa (ruch obrotowy).
II zasada
Ciało, na które działają stałe siły, porusza się ruchem jednostajnie przyspieszonym z przyspieszeniem a, którego wartość i kierunek są określone stosunkiem siły wypadkowej F do masy ciała m.

Lub: Tempo zmiany pędu ciała jest równe sile wypadkowej działającej na to ciało.
III zasada - PRAWO AKCJI I REAKCJI
Siły są zawsze wynikiem oddziaływania dwóch ciał. Dwa ciała działają na siebie siłami równymi co do wartości i przeciwnymi co do zwrotu.
lub
![]()
Gdy dwa ciała oddziałują wzajemnie, to siła wywierana przez ciało drugie na ciało pierwsze jest równa i przeciwnie skierowana do siły jaką ciało pierwsze działa na ciało drugie.
6. Zasada zachowania pędu:
Prawo zachowania pędu - jeżeli wypadkowa sił zewnętrznych działających na układ wynosi zero (Fzew = 0), wtedy całkowity pęd układu pozostaje stały. czyli
całkowity pęd układu odosobnionego jest wielkością stałą w każdym czasie.
![]()
Układ odosobniony (zamknięty lub izolowany) - układ, na który nie działają żadne siły zewnętrzne.
7. Środek masy (prawo ruchu i zachowania)
-Prawo ruchu środka masy:
Środek masy układu punktów materialnych (ciała) porusza się w taki sposób, jakby cała masa układu była skupiona w środku masy i jakby wszystkie siły zewnętrzne nań działały.
PRAWO RUCHU ŚRODKA MASY:
![]()
Prawo zachowania środka masy
Jeżeli suma sił zewnętrznych jest równa zeru czyli siły zewnętrzne nie działają (układ izolowany), to położenie środka masy nie ulega zmianie.
8.Ruch jednostajny po okręgu, przyspieszenie styczne i dośrodkowe.
W ruchu krzywoliniowym przyspieszenie (a) punktu rozkładamy na przyspieszenie styczne (at) i normalne (dośrodkowe) (ad)
![]()
Przyspieszenie styczne at:
![]()
Czyli:
![]()
Gdzie:
![]()
r - promień krzywizny krzywej (w szczególnym przypadku okręgu) będącego torem ruchu,
ε - przyspieszenie kątowe, jedn. [rad/s2]=[obr/s2]=[1/s2] (analogia do liniowego)
Przyspieszenie dośrodkowe ad - wektor równoległym do wektora wodzącego r i skierowanym, tzn. ku środkowi okręgu
![]()
Wartość bezwzględna przyspieszenia w ruchu po okręgu wynosi
![]()
![]()
![]()
Gdzie:
9. Prędkość, prędkość i przyspieszenie kątowe, siła dośrodkowa:
![]()
Dla ruchu po okręgu
![]()
ω - prędkość kątowa,
jedn. [rad/s] = [obr/s]=[1/s].
![]()
Siła dośrodkowa: Fdo = mado = mv2 / r
10. Moment pędu, moment siły.
-Moment pędu cząstki:
Cząstka o masie m, pędzie p w odległości r od początku układu współrzędnych 0
Moment pędu cząstki względem pkt. 0, ozn. L i definiujemy
![]()
![]()
θ - kąt między r i p
r - położenie cząstki wzgl. wybranego
inercjalnego układu odniesienia
![]()
Wektor L - prostopadły do płaszczyzny utworzonej przez wektory r i p (definicją iloczynu wektorowego) (rys. 4).
-Moment siły cząstki:
![]()
Jeżeli siła F działa na cząstkę w punkcie P odległym o r względem pewnego punktu odniesienia 0, to moment siły M względem początku układu definiujemy jako
![]()
r - wektor wodzący punktu przyłożenia działającej siły,
określa położenie cząstki wzgl. wybranego
inercjalnego układu odniesienia (lub ramię siły)
M - moment siły względem pkt. 0.,
θ - kąt między r i F,
![]()
11. Moment bezwładności, twierdzenie Steinera:
Twierdzenie Steinera - Moment bezwładności (I) względem dowolnej osi równa się momentowi bezwładności I0 względem osi przechodzącej przez środek masy ciała (i równoległej do danej osi), zwiększonemu o iloczyn masy całkowitej (m) ciała przez kwadrat odległości (d) środka mas ciała od danej osi.
![]()
>>d - odległość środka masy od rozpatrywanej osi (odległość pomiędzy osiami),I0 - moment bezwładności wzgl. osi przechodzącej przez środek masy,m - masa ciała.
12.. Zasada zachowania momentu pędu:
Zasada zachowania momentu pędu (krętu)
![]()
Suma zewnętrznych momentów sił działających na układ cząstek jest równa zeru
Kiedy wypadkowy moment sił zewnętrznych działających na układ wynosi zero (Mzew=0) całkowity moment pędu układu pozostaje stały.
13. Zasady dynamiki ruchu obrotowego:
II zasada dynamiki dla ruchu obrotowego ciała sztywnego (równanie ruchu analogiczne do ruchu postępowego)
Szybkość zmian całkowitego momentu pędu układu cząstek względem ustalonego punktu odniesienia jest równa sumie zewnętrznych momentów sił działających na układ.
![]()
gdzie
Mzew - suma wszystkich zewnętrznych momentów sił działających na układ
14. Analogie ruchu obrotowego i postępowego:
gdzie
15.Siła zachowawcza i niezachowawcza:
Siła jest zachowawcza, jeżeli praca wykonana przez tę siłę podczas przemieszczania ciała po dowolnej drodze zamkniętej jest równa zeru.
Siła jest niezachowawcza, jeżeli praca wykonana przez tę siłę podczas przemieszczania ciała po dowolnej drodze zamkniętej jest różna od zera.
16. Układy odniesienia (inercjalny i nieinercjalny:
Układ nieinercjalny - układ poruszający się względem układu inercjalnego z przyspieszeniem różnym od zera (a≠0) (np. układ obracający się względem układu inercjalnego - obracająca się tarcza).
Uwzględnienie sił bezwładności (pozornych) jest konieczne jeżeli chcemy stosować zasady dynamiki w układach nieinercjalnych.
Mechanikę klasyczną - stosujemy do inercjalnych układów odniesienia.
W układach poruszających się ze stałą prędkością po linii prostej siły bezwładności nie występują. Układy takie noszą nazwę układów inercjalnych
17. Praca (siły stałej i zmiennej), energia, moc.
17. Energia kinetyczna. Twierdzenie o pracy i energii.
![]()
Twierdzenie o pracy i energii:
Praca wykonana podczas przemieszczania ciała przez siłę wypadkową F jest równa zmianie energii kinetycznej tego ciała.
![]()
Z twierdzenia wynika, że jednostki pracy i energii są takie same.
18. Zasada zachowania energii mechanicznej i całkowitej.
![]()
Prawa strona równania zalezy od początkowego położenia xo i początkowej prędkości vo które SA wielkościami danymi i stałymi czyli można zapisać, ze ta strona jest stała podczas ruchu i nazywamy ja całkowitą energią mechaniczną i oznaczamy E, w ten sposób otrzymując ZASADE ZACHOWANIA ENERGII MECHANICZNEJ (KINETYCZNEJ I POTENCJALNEJ)
![]()
Czyli:
Suma energii potencjalnej i kinetycznej jest wielkością stałą.
![]()
Gdy ruch punktu materialnego odbywa się w polu grawitacyjnym ziemskim - zasada ma postać
gdzie
h - wysokość punktu materialnego od powierzchni Ziemi
Ogólna zasada zachowania energii
W układzie izolowanym suma wszystkich postaci energii jest zawsze wielkością stałą.
Zasada stosuje się tylko do tych przypadków, gdy następuje przemiana jednej postaci energii na drugą, a nie powstają inne rodzaje energii.
19. Ruch planet i satelitów (prawa Keplera)
I prawo Keplera
Wszystkie planety krążą po orbitach eliptycznych. Słońce znajduje się w jednym z dwóch ognisk tej elipsy.
II prawo Keplera (prawo równych pól)
Linia łącząca Słońce i planetę zakreśla równe pola w równych odstępach czasu.
Z II prawa Keplera wynika, że prędkość planety rośnie, gdy przybliża się ona do Słońca; największa jest w pkt. B (rys. 1), a maleje przy oddalaniu się od Słońca, osiągając najmniejszą wartość w pkt. A.
III prawo Keplera
Sześciany wielkich półosi orbit (a) dwóch, dowolnych planet są proporcjonalne do kwadratów ich okresów obiegu (T).
![]()
20. Prawo powszechnej grawitacji
![]()
Prawo powszechnego ciążenia (stosuje się do wszystkich sił grawitacyjnych) (Newtona)
Dwa punkty materialne o masach M i m oddziałują na siebie (przyciągają się) wzajemnie siłą F:
![]()
![]()
lub wektorowo
21. Pole grawitacyjne centralne
Pole grawitacyjne centralne
Masy kuliste wytwarzają wokół siebie pola centralne
(jednorodne, pełne lub wydrążone współśrodkowo masy kuliste).
Linie sił pola grawitacyjnego, centralnego biegną promieniście do środka kuli i kończą się na jej powierzchni (pole przyciągające)
W pobliżu powierzchni Ziemi pole grawitacyjne można uważać za jednorodne do wysokości ok. kilkuset metrów.
22. Ntężenie i potencjał pola grawitacyjnego:
Natężenie pola grawitacyjnego w danym punkcie jest określone ilorazem siły F, jaka działa na dowolny punkt materialny o masie m, przez jego masę.

W polu wytworzonym przez punkt materialny o masie M, natężenie pola grawitacyjnego wynosi:
![]()
Lub wektorowo:
![]()
r - wektor wodzący punktu, w którym wyznaczamy natężenie pola grawitacyjnego wytworzonego przez punkt M,
E - wektor natężenia pola określający wartość, kierunek i zwrot siły grawitacji działającej na ciało umieszczone w danym punkcie pola grawitacyjnego.
Natężenie E zależy od źródła siły (masy M) i charakteryzuje przestrzeń otaczającą źródło (wektor r)
Masie M przypisujemy obszar wpływu działania czyli pole (M wytwarza pole, pole to działa na m).
Potencjał pola
-Dla sił zachowawczych zmianę energii potencjalnej ciała, przy przejściu z pkt. A do B, wyznaczamy jako pracę, którą należy wykonać przeciw sile grawitacji, aby przenieść (ruchem jednostajnym, ΔEk = 0) ciało z A do B.
W polu grawitacyjnym, jednorodnym na ciało o masie m działa siła ciężkości równa
F = Fg = mg
Podnosząc ciało ruchem jednostajnym pionowo do góry na wysokość h wykonuje pracę
W = Fh = mgh
czyli
Energia potencjalna ciała o masie m na wysokości h nad poziomem zerowym przyjmuje wartość
၄Ep= -W = mgh - mgh0
dla h0 = 0 Ep = mgh
23. Postulaty Einsteina szczególnej teorii względności
-sformułowanie postulatów zasady względności:
>>jednostajny i prostoliniowy ruch odosobnionego układu nie ma wpływu na zjawiska zachodzące w tym układzie
>>prędkość światła w próżni nie zależy od prędkości źródła światła i jest jednakowa we wszystkich inercjalnych układach odosobnionych - stałość prędkości światła.
>>>>>>druga możliwość<<<<<
Zasadzie względności
Zasada głosząca, że prawa fizyki są jednakowe we wszystkich układach inercjalnych — musi obowiązywać dla wszystkich praw zarówno mechaniki jak i elektrodynamiki.
Niezmienność prędkości światła
Prędkość światła w próżni jest taka sama dla wszystkich obserwatorów, taka sama we wszystkich kierunkach i nie zależy od prędkości źródła światła.
Z połączenia postulatów 1 i 2 wynika, że światło nie potrzebuje jakiegokolwiek ośrodka (eteru) do rozchodzenia się
29. Ruch harmoniczny prosty .
(równanie, rozwiązanie)
Każdy ruch powtarzający się w regularnych odstępach czasu nazywany jest ruchem okresowym. Jeżeli ruch ten opisywany jest sinusoidalną funkcją czasu to jest to ruch harmoniczny. Ciało porusza się ruchem harmonicznym prostym, jeżeli znajduje się pod wpływem siły o wartości proporcjonalnej do wychylenia z położenia równowagi i skierowanej w stronę położenia równowagi:
Z II zasady dynamiki Newtona
F = ma i F = -kx
x - wychylnie punktu materialnego z położenia równowagi,
k - stała sprężystości (sprężyny)
stąd:
![]()
Równanie ruchu oscylatora harmonicznego prostego:
![]()
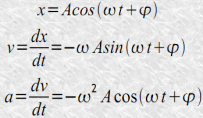
30. Przemieszczenie, prędkość i przyspieszenie w ruchu harmonicznym prostym (wykresy, interpretacja).
Wykresy i wzory (przemieszczenie, predkosc, przyspieszenie) w ruchu harmonijnym
Przy maksymalnym wychyleniu w obie
strony prędkość równa się zeru,
ponieważ musi wtedy zmienić kierunek.
Przyspieszenie w takiej chwili, podobnie
jak siła przywracająca równowagę
osiąga wartość maksymalną, lecz jest
ono skierowane przeciwnie do
przemieszczenia. Kiedy wychylenie jest
zerowe, prędkość punktu materialnego
osiąga wartość maksymalną, a
przyspieszenie znika, podobnie jak siła
przywracająca równowagę układowi.
Prędkość wzrasta w miarę zbliżania się
punktu materialnego do położenia
równowagi i maleje wraz z oddalaniem
się od niego.13
Ruch harmoniczny prosty
Krzywe na przedstawionym wykresie
określone są równaniami:

31. Całkowita energia mechaniczna (kinetyczna i potencjalna) w ruchu harmonicznym.
Całkowita energia mechaniczna jest zachowana, gdy na układ nie działają żadne siły rozpraszające.
![]()
Energia potencjalna:
![]()
Energia kinetyczna:
![]()
32. Wahadło matematyczne i fizyczne.
Wahadło matematyczne - wyidealizowane ciało o masie punktowej m, zawieszone na cienkiej, nierozciągliwej nici. Wytrącone z równowagi waha się w płaszczyźnie pionowej pod wpływem siły ciężkości.
Okres drgań w ruchu harmonicznym
![]()
Okres drgań wahadła matematycznego nie zależy od masy, lecz od długości ramienia wahającej się masy.
Wahadło fizyczne - ciało zawieszone tak, że może obracać się dookoła osi poziomej pod wpływem własnego ciężaru, przy czym oś ta nie przechodzi przez środek masy ciała.
m - masa wahadła
a - odległość masy od osi obrotu
I - moment bezwładności wahadła względem
osi obrotu
φ - kąt wychylenia z położenia równowagi
![]()
Okres wahadła fizycznego określa wzór
![]()
lr - długość zredukowana wahadła fizycznego, określa ona odległość takich dwóch osi (niesymetrycznie położonych względem środka ciężkości), wokół których wahadło waha się z jednakowym okresem.
33. Ruch harmoniczny tłumiony (równanie, rozwiązanie).
W przypadku drgań mechanicznych siłą hamującą (tłumiącą) ruch cząstki jest siła oporu Fop ośrodka.
Prędkość maleje wykładniczo z czasem, czyli jest tłumiona ze stałą czasową (rys)
![]()
![]()
Ruch jest tłumiony - oprócz siły F = -kx na punkt materialny działa siła proporcjonalna do prędkości poruszającego się punktu skierowana przeciwnie niż prędkość, równanie
![]()
k1 - współczynnik oporu ośrodka
0 - częstość własna układu tj. częstość drgań swobodnych,
- współczynnik tłumienia.
Rozwiązaniem tego równania (dla słabego tłumienia przy ω0> β) jest
![]()
Gdzie
![]()
Tłumienie λ - obliczymy jako - iloraz dwóch po sobie następujących maksymalnych wychyleń w tę sama stronę.
![]()
34. Ruch harmoniczny wymuszony (równanie, rozwiązanie).
![]()
Jeżeli oprócz sił wymienionych działa jeszcze na punkt materialny siła zewnętrzna F(t) (F = F0sinω2t) zmieniająca się okresowo (podtrzymująca gasnące drgania), wtedy równanie ruchu punktu materialnego ma postać:
Teraz dwie wielkości są zmienne okresowo: położenie x i siła F
![]()
Szukamy rozwiązania postaci
x = x0 sin(ω2t + φ)
x0, φ - wielkości stałe, amplituda i faza,
![]()
ω2 - częstość drgań (siły wymuszającej) ruchu tłumionego
35. Kwantyzacja ładunku i zasada zachowania ładunku.
2. Kwantyzacja ładunku
Żadna naładowana cząstka nie może mieć ładunku mniejszego niż ładunek elektronu czy protonu.
Ładunek elementarny e = 1,6·10-19 C.
Jednostka ładunku w ukł. SI 1 C = 1 A s.
Wszystkie ładunki są wielokrotnością e.
Niektóre cząstki elementarne, takie jak neutron, foton czy neutrino mają ładunek równy zeru.
3. Zachowanie ładunku - Benjamin Franklin (1747 r.).
Wypadkowy ładunek w układzie zamkniętym (izolowanym) jest stały (nie zmienia się w czasie).
Zasada ta obowiązuje nawet w skrajnym przypadku anihilacji naładowanych cząstek. Jeśli elektron jest anihilowany przez pozyton, ginie zarówno ładunek dodatni, jak i ujemny, jednakże wypadkowy ładunek był równy zeru przed i po anihilacji.
36. Prawo Coulomba.
Prawo Coulomba
Siła oddziaływania dwóch ładunków q1 i q2 (naładowanych ciał)
![]()
Gdzie:
![]()
- stała dielektryczna substancji lub względna przenikalność elektryczna ośrodka jest wielkością charakterystyczna dla danego ośrodka, zawsze większa od jedności (ၥ>1).
Dla wody (0-1000C) ၥ = 88,0-55,5, helu ၥ = 1,00007, a dla powietrza ၥ = 1,0006.
![]()
Za pomocą prawa Coulomba można opisać:
>>oddziaływania między poszczególnymi elektronami atomu oraz pomiędzy elektronami a jądrem atomowym
>>siły oddziaływania między atomami tworzącymi cząsteczkę chemiczną
>> siły oddziaływania między atomami ciała stałego.
37. Elektryczny i magnetyczny moment dipolowy
5. Dipol elektryczny
Dipol elektryczny składa się z dwóch ładunków Q oddalonych od siebie o l.
![]()
Jaka siła jest wywierana F na ładunek q umieszczony tak jak na rysunku?
p = Ql - moment dipolowy.
![]()
………………………………………………….
nazywamy magnetycznym momentem dipolowym. Pole magnetyczne działa, więc na ramkę z prądem (dipol magnetyczny) momentem skręcającym obracając ją.
38. Natężenie pola elektrycznego
Natężenie pola elektrycznego definiujemy jako siłę działającą na ładunek próbny q (umieszczony w danym punkcie przestrzeni) podzieloną przez ten ładunek.
![]()
Ładunek próbny jest dodatni (umowa).
Kierunek E jest taki sam jak F (na ładunek dodatni).
39. Strumień pola elektrycznego i magnetycznego.
Strumień pola elektrycznego
Kierunek pola E w przestrzeni można przedstawić za pomocą tzw. linii sił.
Linie nie tylko pokazują kierunek E ale też jego wartość (liczbę linii na jednostkę powierzchni).
Jeżeli liczbę linii przechodzących przez powierzchnię S oznaczymy to wówczas = E
gdzie
- kąt pomiędzy wektorem powierzchni S i wektorem E (rys.).
W ogólności więc strumień elektryczny definiujemy jako d = dE ds
Otrzymany strumień nie zależy od r, zatem strumień jest jednakowy dla wszystkich r.
Całkowita liczba linii wychodzących od ładunku jest równa Q/0 i linie te biegną do nieskończoności.
Ponieważ pokazaliśmy, że strumień jest taki sam przez każdą powierzchnię niezależnie od r, więc jest to również prawdą dla zamkniętej powierzchni o dowolnym kształcie (która otacza ładunek Q) - powierzchni Gaussa.
Strumień indukcji pola magnetycznego - jest strumieniem pola dla indukcji magnetycznej.
Strumień przepływający przez powierzchnię S jest zdefiniowany jako iloczyn skalarny wektora indukcji magnetycznej i wektora powierzchni S.
Dla powierzchni płaskiej i jednorodnego pola magnetycznego wzór na strumień ma postać:
40. Prawo Gaussa
Prawo Gaussa - Niech zamknięta powierzchnia obejmuje dwa ładunki Q1 i Q2. Całkowita liczba linii sił przecinająca powierzchnię zamkniętą wokół ładunków Q1 i Q2 jest równa
![]()
gdzie E1 jest wytwarzane przez Q1, a E2 przez Q2. Powołując się na wcześniejszy wynik otrzymujemy:
φcałk = (Q1/ε0) + (Q2/ε0) = (Q1 + Q2)/ε0
Całkowita liczba linii sił jest równa całkowitemu ładunkowi podzielonemu przez ε0. Podobnie można pokazać dla dowolnej liczby n ładunków.
Otrzymujemy więc prawo Gaussa
![]()
Strumień pola wychodzący z naładowanego ciała jest równy wypadkowemu ładunkowi podzielonemu przez ၥ0.
Jeżeli Q jest ujemne strumień wpływa do ciała.
Linie mogą zaczynać się i kończyć tylko na ładunkach, a wszędzie indziej są ciągłe.
41. Energia (gęstość energii) pola elektrycznego i magnetycznego.
Gęstość energii pola elektrycznego
![]()
Jeżeli w jakimś punkcie przestrzeni jest pole E, to możemy uważać, że jest tam zmagazynowana energia w ilości
![]()
na jednostkę objętości (jednostka [J/m3]).
Pole magnetyczne:
Opisuje gęstość energii pola magnetycznego zawartej w każdym punkcie przestrzeni w której jest indukcja magnetyczna B
gdzie:
E - gęstość energii pola magnetycznego w danym punkcie,
B - indukcja magnetyczna,
μ - względna przenikalność magnetyczna ośrodka,
μ0 - przenikalność magnetyczna próżni.
42. Cewka, kondensator
Początkowo nie naładowany kondensator ładuje się wskutek stopniowego zwiększania różnicy potencjałów od 0 do napięcia U.
Wtedy ładunek wzrasta od 0 do Q, gdzie Q = CU.
Praca zuzyta na przeniesienie ładunku z okładki ujemnej na dodatnią wynosi:
dW=Udg
Całkowita praca cztli energia zgromadzona w kondensatorze wynosi więc:
W=(1/2)(Q^2/C)
Dlakondensatora płaskiego: Q=(epsilon zero)ES
43. Trzy wektory elektryczne
Na powierzchni dielektryka pojawiają się ładunki związane, odpowiadające końcom łańcuchów dipoli, częściowo neutralizujące ładunek (swobodny), znajdujący się na okładkach kondensatora. Aby poprawnie opisać zjawiska zachodzące w kondensatorze z dielektrykiem, oprócz wektora natężenia pola elektrycznego
wprowadza się wektory: indukcji
i polaryzacji
. Poszczególne wektory wiąże się z odpowiednimi ładunkami:
- wszystkie ładunki
- tylko ładunki swobodne
- Tylko ładunki związane (polaryzacyjne). Wektor ten znika w próżni.
Jeśli
= 0, to
= ε0
, natomiast dla
≠ 0,
= ε0
+
. W dielektryku izotropowym kierunki wszystkich wektorów są zgodne. Dla dielektryków liniowych (ε = const, χ = const) można podać następujące związki empiryczne:
D - INDUKCJI
E - NATĘŻENIA POLA
P - POLARYZACJI
44. Prawo Ohma i gęstość prądu elektrycznego
8. Prawo Ohma
Jeżeli do przewodnika przyłożymy różnicę potencjałów V, to przez przewodnik płynie prąd I. Na początku XIX wieku Ohm zdefiniował opór przewodnika jako napięcie podzielone przez natężenie prądu
Definicja oporu:
![]()
Ten stosunek jest stały pod warunkiem, że utrzymuje się stałą temperaturę, czyli opór jest niezależny od natężenia prądu I dla metalu w stałej temperaturze T (prawo Ohma).
Jednostką oporu (SI) jest 1 (Ohm) 1ၗ.
Inaczej opór można zdefiniować jako
![]()
Stałą ၸ - opór właściwy (rezystywność)
opór elektryczny R przewodnika zależy od rodzaju materiału.
Opór właściwy ၸ jest liniową funkcją temperatury (z wyjątkiem obszaru nadprzewodnictwa), dlatego opór elektryczny przewodnika rośnie wraz ze wzrostem jego temperatury.
45. Siła elektomotoryczna, Prawo Kirchoffa
11. Obwody prądu stałego, Prawa Kirchoffa
Oznaczenia: DC - dla prądu stałego (ang. direct current),
AC - dla prądu zmiennego (ang. alternating current)
Łączenie oporów w większości obwodów (Rz =U/I):
szeregowe
ten sam prąd przez oporniki I1 = I2 = I3 = .....
napięcie - suma napięć na oporach U = U1 + U2 + .....
amperomierze - połączone szeregowo
Rz = R1 + R2 + .....
równoległe
to samo napięcie na opornikach U1 = U2 = .....
natężenie - suma natężeń prądów płynących przez poszczególne opory
I = I1 + I2 + .....
woltomierze - połączone równolegle
1/Rz = 1/R1 + 1/R2 + .....
Prawa Kirchoffa (złożone obwody)
Twierdzenie o obwodzie zamkniętym: algebraiczna suma przyrostów napięć w dowolnym obwodzie zamkniętym jest równa zeru. (Spadek napięcia jest przyrostem ujemnym napięcia).
Twierdzenie o punkcie rozgałęzienia: algebraiczna suma natężeń prądów przepływających przez punkt rozgałęzienia jest równa zeru.
Twierdzenie o obwodzie zamkniętym jest wynikiem prawa zachowania energii, a twierdzenie o punkcie rozgałęzienia wynika z prawa zachowania ładunku.
SIŁA ELEKTROMOTORYCZNA
10. Siła elektromotoryczna
Aby w oporniku czy w przewodzie utrzymać stały prąd potrzeba źródła energii elektrycznej (urządzenia, które wytwarzają różnicę potencjałów między dwoma punktami).
Np. baterie, generatory elektryczne. Nazywamy je źródłami siły elektromotorycznej SEM. W takich źródłach jeden rodzaj energii (np. chemicznej w bateriach, mechanicznej w generatorach) jest zamieniany na drugi.
SEM oznaczamy ၥ i definiujemy
![]()
gdzie W - energia elektryczna przekazywana ładunkowi q, gdy przechodzi on przez źródło SEM.
SEM jest liczbowo równa pracy jaką wykona źródło przeciw siłom pola elektrycznego przenosząc ładunek q (q = +1C) od bieguna o potencjale niższym (-) do bieguna o potencjale wyższym (+).
Ładunek q przechodząc od ujemnego (-) do dodatniego (+) bieguna zyska energię równą
W = qၥ
47. Siła Lorentza i Siła elektrodynamiczna
Siła Lorentza — siła jaka działa na cząstkę obdarzoną ładunkiem elektrycznym poruszającą się w polu elektromagnetycznym. Wzór podany został po raz pierwszy przez Lorentza i dlatego nazwano go jego imieniem.
Wzór określa, jak siła działająca na ładunek zależy od pola elektrycznego i pola magnetycznego (składników pola elektromagnetycznego):
gdzie:
F - siła (w niutonach),
E - natężenie pola elektrycznego (w woltach / metr),
B - indukcja magnetyczna (w teslach),
q - ładunek elektryczny cząstki (w kulombach),
v - prędkość cząstki (w metrach na sekundę),
× - iloczyn wektorowy.
Terminem siła Lorentza określa się czasem samą składowa magnetyczną tej siły[1]
Wyszukiwarka