Politechnika Lubelska w Lublinie |
Laboratorium Napędu Elektrycznego |
|||||
|
Ćwiczenie numer 19 |
|||||
|
Semestr |
Grupa |
Rok akadem.
|
|||
Temat ćwiczenia: Regulacja prędkości kątowej indukcyjnego silnika pierścieniowego w podsynchronicznych kaskadach przekształtnikowych. |
Data wykonania:
|
Ocena: |
||||
1. Dane znamionowe.
silnik pierścieniowy
typ SZUe 446
Pn = 4 kW
Un = 380 V
In = 8,6 A
nn = 1425 obr/min
Ew = 103 V
silnik prądu stałego
typ PCMb 546
Pn = 7,5 kW
Un = 220 V
In = 39,2 A
nn = 1450 obr/min
Iw = 0,93 A
prądnica hamownicza
typ PZMb 546
Pn = 5,5 kW
Un = 220 V
In = 28,8 A
nn = 1450 obr/min
Iw = 0,714 A
transformator
Yy0
Sn = 6,6 kVA
U1 = 380 V
I1 = 10 A
U2 = 127 V
I2 = 30 A
Iw = 28 A
cos = 0,82
2. Charakterystyki mechaniczne kaskady typu M = const. (w układzie otwartym).
a) Ideowy schemat układu pomiarowego.
Tabela wyników pomiarów i obliczeń.
a |
U1 |
I1 |
P1 |
Uw |
Id |
ItH |
|
s |
Po |
EH |
Pw |
M |
|
p |
o |
V |
A |
W |
V |
A |
A |
rad/s |
- |
W |
V |
W |
Nm |
- |
- |
|
393,00 |
5,40 |
0,19 |
101,00 |
2,00 |
0,00 |
78,31 |
0,50 |
158,98 |
88,80 |
158,98 |
2,03 |
0,84 |
0,05 |
|
394,00 |
6,10 |
0,28 |
99,00 |
3,50 |
1,00 |
76,76 |
0,51 |
155,83 |
87,04 |
242,88 |
3,16 |
0,87 |
0,07 |
|
393,00 |
6,40 |
0,37 |
97,00 |
5,50 |
2,00 |
75,20 |
0,52 |
152,69 |
85,28 |
323,25 |
4,30 |
0,87 |
0,09 |
100 |
393,00 |
6,80 |
0,49 |
96,00 |
6,50 |
3,00 |
74,43 |
0,53 |
151,11 |
84,40 |
404,33 |
5,43 |
0,83 |
0,11 |
|
394,00 |
7,10 |
0,55 |
94,00 |
7,20 |
4,30 |
72,88 |
0,54 |
147,96 |
82,65 |
503,34 |
6,91 |
0,92 |
0,11 |
|
393,00 |
7,60 |
0,68 |
92,00 |
9,00 |
5,10 |
71,33 |
0,55 |
144,81 |
80,89 |
557,34 |
7,81 |
0,82 |
0,13 |
|
394,00 |
7,90 |
0,94 |
89,00 |
10,00 |
6,00 |
69,00 |
0,56 |
140,09 |
78,25 |
609,59 |
8,83 |
0,65 |
0,17 |
|
394,00 |
8,50 |
0,98 |
87,00 |
11,30 |
7,00 |
67,45 |
0,57 |
136,94 |
76,49 |
672,39 |
9,97 |
0,69 |
0,17 |
|
392,00 |
5,30 |
0,09 |
36,00 |
1,00 |
0,00 |
27,91 |
0,82 |
56,67 |
31,65 |
56,67 |
2,03 |
0,63 |
0,03 |
|
392,00 |
5,60 |
0,10 |
34,00 |
2,90 |
1,00 |
26,36 |
0,83 |
53,52 |
29,89 |
83,41 |
3,16 |
0,83 |
0,03 |
122 |
392,00 |
6,00 |
0,11 |
31,00 |
4,10 |
2,00 |
24,03 |
0,85 |
48,80 |
27,26 |
103,31 |
4,30 |
0,94 |
0,03 |
|
392,00 |
6,40 |
0,14 |
27,00 |
6,10 |
3,50 |
20,93 |
0,87 |
42,50 |
23,74 |
125,59 |
6,00 |
0,90 |
0,03 |
|
392,00 |
6,70 |
0,16 |
26,00 |
7,30 |
4,50 |
20,16 |
0,87 |
40,93 |
22,86 |
143,79 |
7,13 |
0,90 |
0,04 |
|
392,00 |
7,10 |
0,18 |
24,00 |
8,20 |
5,20 |
18,61 |
0,88 |
37,78 |
21,10 |
147,50 |
7,93 |
0,82 |
0,04 |
|
392,00 |
5,50 |
0,25 |
134,00 |
2,90 |
0,00 |
103,89 |
0,34 |
210,93 |
117,81 |
210,93 |
2,03 |
0,84 |
0,07 |
|
392,00 |
6,00 |
0,38 |
130,00 |
4,20 |
1,20 |
100,79 |
0,36 |
204,63 |
114,30 |
341,79 |
3,39 |
0,90 |
0,09 |
|
392,00 |
6,30 |
0,59 |
129,00 |
5,90 |
2,90 |
100,01 |
0,36 |
203,06 |
113,42 |
531,97 |
5,32 |
0,90 |
0,14 |
90 |
392,00 |
6,90 |
0,65 |
127,00 |
6,50 |
3,30 |
98,46 |
0,37 |
199,91 |
111,66 |
568,39 |
5,77 |
0,87 |
0,14 |
|
392,00 |
7,20 |
0,70 |
126,00 |
7,10 |
4,10 |
97,69 |
0,38 |
198,33 |
110,78 |
652,54 |
6,68 |
0,93 |
0,14 |
|
392,00 |
7,50 |
0,75 |
123,00 |
9,00 |
5,00 |
95,36 |
0,39 |
193,61 |
108,14 |
734,33 |
7,70 |
0,98 |
0,15 |
|
392,00 |
7,90 |
0,87 |
121,00 |
10,00 |
6,10 |
93,81 |
0,40 |
190,46 |
106,39 |
839,41 |
8,95 |
0,96 |
0,16 |
|
392,00 |
8,70 |
0,97 |
118,00 |
12,00 |
7,50 |
91,49 |
0,42 |
185,74 |
103,75 |
963,85 |
10,54 |
0,99 |
0,16 |
Charakterystyka = f(M).
Charakterystyka M = f(Id).
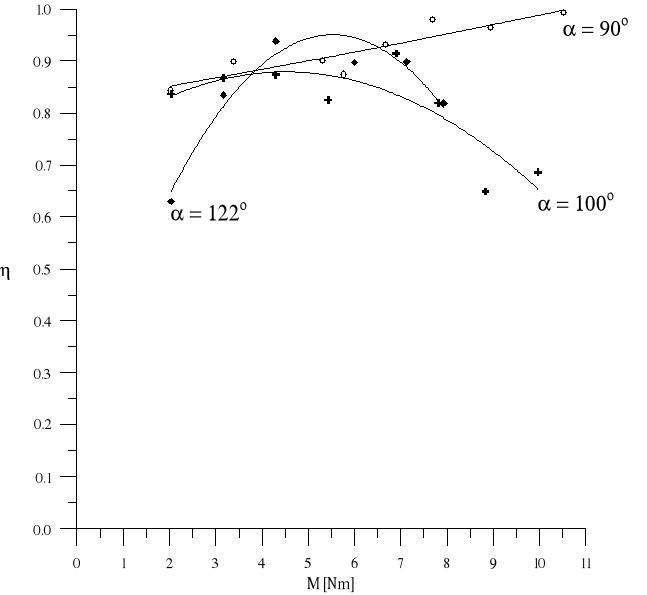
= f(M)
e) p = f(m)
3.Charakterystyki mechaniczne kaskady typu P = const.
Schemat ideowy układu pomiarowego.
Tabela wyników pomiarów i obliczeń.
a |
U1 |
I1 |
P1 |
Uw |
Id |
Ith |
Im |
|
s |
Po |
EH |
Pw |
M |
|
p |
el |
V |
A |
W |
V |
A |
A |
A |
rad/s |
- |
W |
V |
W |
Nm |
- |
- |
|
364 |
4,6 |
0,17 |
108 |
1,8 |
0,0 |
0,12 |
83,7 |
0,47 |
151,11 |
95,0 |
151,1 |
1,8 |
0,89 |
0,06 |
|
364 |
5,1 |
0,39 |
105 |
5,0 |
2,6 |
0,12 |
81,4 |
0,48 |
146,91 |
92,3 |
386,9 |
4,8 |
0,99 |
0,12 |
|
364 |
5,2 |
0,57 |
104 |
7,7 |
4,1 |
0,12 |
80,6 |
0,49 |
145,51 |
91,4 |
520,4 |
6,5 |
0,91 |
0,17 |
140 |
364 |
5,7 |
0,68 |
103 |
10,0 |
5,8 |
0,12 |
79,9 |
0,49 |
144,12 |
90,6 |
669,4 |
8,4 |
0,98 |
0,19 |
|
364 |
6,1 |
0,88 |
102 |
15,0 |
8,0 |
0,12 |
79,1 |
0,50 |
142,72 |
89,7 |
860,2 |
10,9 |
0,98 |
0,23 |
|
364 |
6,5 |
1,20 |
100 |
19,2 |
11,8 |
0,12 |
77,5 |
0,51 |
139,92 |
87,9 |
1177,4 |
15,2 |
0,98 |
0,29 |
|
364 |
6,8 |
1,60 |
98 |
19,5 |
15,0 |
0,12 |
76,0 |
0,52 |
137,12 |
86,2 |
1429,6 |
18,8 |
0,89 |
0,37 |
|
364 |
4,7 |
0,16 |
79 |
1,1 |
0,0 |
0,34 |
61,2 |
0,61 |
110,53 |
69,5 |
110,5 |
1,8 |
0,69 |
0,05 |
|
364 |
4,9 |
0,35 |
77 |
5,2 |
3,0 |
0,34 |
59,7 |
0,62 |
107,74 |
67,7 |
310,8 |
5,2 |
0,89 |
0,11 |
|
364 |
5,1 |
0,39 |
75 |
6,5 |
4,0 |
0,34 |
58,1 |
0,63 |
104,94 |
65,9 |
368,7 |
6,3 |
0,95 |
0,12 |
110 |
364 |
5,3 |
0,49 |
74 |
8,5 |
5,9 |
0,34 |
57,4 |
0,63 |
103,54 |
65,1 |
487,4 |
8,5 |
0,99 |
0,15 |
|
364 |
5,7 |
0,59 |
73 |
11,0 |
7,3 |
0,34 |
56,6 |
0,64 |
102,14 |
64,2 |
570,7 |
10,1 |
0,97 |
0,16 |
|
364 |
5,9 |
0,69 |
72 |
12,0 |
9,0 |
0,34 |
55,8 |
0,64 |
100,74 |
63,3 |
670,5 |
12,0 |
0,97 |
0,19 |
|
364 |
6,2 |
0,95 |
71 |
15,0 |
11,9 |
0,34 |
55,0 |
0,65 |
99,34 |
62,4 |
842,2 |
15,3 |
0,89 |
0,24 |
|
364 |
5,0 |
0,19 |
84 |
1,0 |
0,0 |
0,32 |
65,1 |
0,59 |
117,53 |
73,9 |
117,5 |
1,8 |
0,62 |
0,06 |
|
364 |
5,2 |
0,29 |
82 |
4,0 |
2,3 |
0,32 |
63,6 |
0,60 |
114,73 |
72,1 |
280,6 |
4,4 |
0,97 |
0,09 |
|
364 |
5,2 |
0,46 |
80 |
6,0 |
4,8 |
0,32 |
62,0 |
0,60 |
111,93 |
70,3 |
449,6 |
7,2 |
0,98 |
0,14 |
85 |
364 |
5,5 |
0,55 |
79 |
8,0 |
6,0 |
0,32 |
61,2 |
0,61 |
110,53 |
69,5 |
527,3 |
8,6 |
0,96 |
0,16 |
|
364 |
5,7 |
0,65 |
78 |
10,0 |
7,8 |
0,32 |
60,5 |
0,61 |
109,14 |
68,6 |
644,1 |
10,7 |
0,99 |
0,18 |
|
364 |
6,0 |
0,75 |
77 |
11,5 |
9,0 |
0,32 |
59,7 |
0,62 |
107,74 |
67,7 |
717,0 |
12,0 |
0,96 |
0,20 |
|
364 |
6,1 |
0,80 |
76 |
13,0 |
10,3 |
0,32 |
58,9 |
0,62 |
106,34 |
66,8 |
794,6 |
13,5 |
0,99 |
0,21 |
|
364 |
6,3 |
0,85 |
76 |
14,0 |
11,0 |
0,32 |
58,9 |
0,62 |
106,34 |
66,8 |
841,4 |
14,3 |
0,99 |
0,21 |
Charakterystyka = f(M).
d) Charakterystyka M = f(Id).
Charakterystyka = f(M).
Charakterystyka p = f(M).
Uwagi i wnioski.
Na podstawie przeprowadzonego ćwiczenia można stwierdzić, że prędkość obrotowa kaskad podsynchronicznych zależy od kąta sterowania zaworów prostownika.
Przy kaskadzie typu M = const. wraz ze wzrostem kąta sterowania prędkość obrotowa maleje. Dla kaskady typu P = const zależność ta jest inna - wzrostowi kąta sterowania odpowiada wzrost prędkości obrotowej.
Ze wzrostem momentu obciążenia obserwuje się spadek prędkości obrotowej. Zależność ta jest w przybliżeniu liniowa. Zmiana kąta sterowania powoduje w przybliżeniu równoległe przesunięcie otrzymanych charakterystyk.
Otrzymane charakterystyki M = f(Id) charakteryzują się liniowym przebiegiem. Kąt nachylenia charakterystyki zmienia się wraz ze zmianą kąta sterowania.
Wyszukiwarka