
Politechnika Wrocławska
Instytut Maszyn i Napędów Elektrycznych
LABORATORIUM PODSTAW NAPĘDU ELEKTRYCZNEGO
Wydział: Elektryczny Rok akademicki: 1997/98
Rok studiów: III Semestr: VI Nr grupy lab: 3
Prowadzący ćwiczenie: mgr A. Bos
Skład grupy |
Ocena |
Uwagi / Ocena końcowa |
(prowadzący protokół) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SPRAWOZDANIE
z ćwiczenia nr 1
Temat ćwiczenia: Badanie silnika obcowzbudnego prądu stałego
zasilanego z prostownika sterowanego.
Data wykonania ćwiczenia: 31.03.1998
Data oddania sprawozdania: 7.04.1998
Data zaliczenia ćwiczenia: .....................
I Dane znamionowe obiektu badań.
Silnik prądu stałego.
Typ : PZBb 44a
Nr fabryczny: 467008
Pn = 1,5 kW
Utn = 220 V
Itn = 8,7 A
nn = 1450 obr/min
Rt = 2,5 Ω (t = 20° C)
Rw = 476 Ω
ΔPFe = 80 W (Ut = Utn)
ΔPm. = 110 W (przy n =1450 obr/min)
Prądnica prądu stałego .
Typ : PZBb 44a
Nr fabryczny: 467003
Pn = 1,2 kW
Utn = 230 V
Itn = 5,2 A
nn = 1450 obr/min
Iwn = 0,37 A
Rt = 4,8 Ω (t = 20° C)
Rw = 476 Ω
ΔPFe = 30 W (Ut = Utn)
ΔPm. = 95 W (przy n =1450 obr/min)
II Spis przyrządów.
Amperomierze (3 szt.)
Woltomierze (2 szt.)
Obrotomierz
Prostownik sterowany
III Cel ćwiczenia.
Celem przeprowadzonego ćwiczenia było zapoznanie się z budową, zasadą działania oraz zaletami stosowania przekształtników sterowanych do zasilania silników obcowzbudnych prądu stałego.
Program ćwiczenia obejmował:
zapoznanie się z układem sterowania przekształtnika tyrystorowego,
wyznaczenie charakterystyk elektromechanicznych silnika badanego silnika.
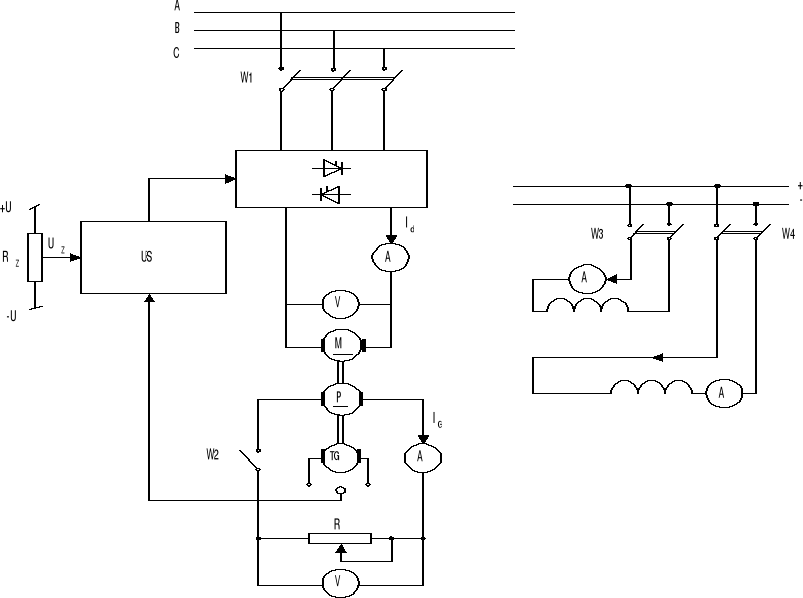
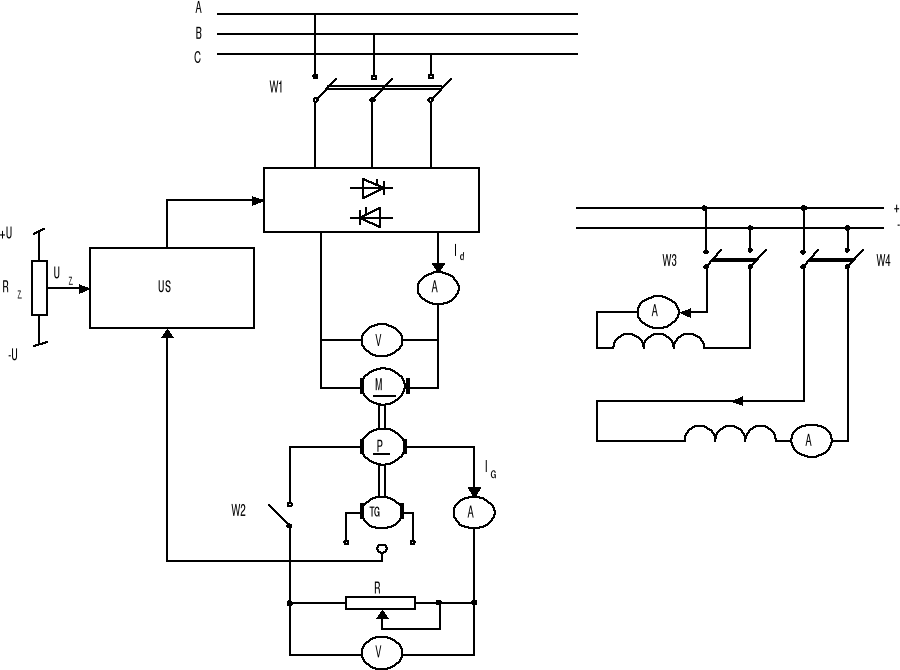
IV Układ pomiarowy.
Rys. 1: Schemat układu do wyznaczania charakterystyk elektromechanicznych
silnika obcowzbudnego prądu stałego.
V Przebieg pomiarów.
Badanym podczas ćwiczenia układem był układ zamknięty z ujemnym sprzężeniem prędkościowym (rys.1).
Prądnica |
Silnik obcowzbudny |
||||
IG |
UG |
ID |
UD |
ω |
IW |
A |
V |
A |
V |
obr/min |
A |
3,0 |
140 |
6,8 |
100 |
773 |
0,4 |
3,0 |
170 |
6,7 |
120 |
953 |
|
3,0 |
200 |
6,6 |
130 |
1191 |
|
2,3 |
240 |
6,0 |
150 |
1297 |
|
2,3 |
250 |
4,9 |
160 |
1319 |
|
1,5 |
250 |
3,5 |
150 |
1319 |
|
0 |
250 |
2,2 |
150 |
1319 |
|
0 |
260 |
1,5 |
150 |
1319 |
|
VI Wykresy i charakterystyki.
Rys. 2: Charakterystyka zewnętrzna prostownika sterowanego w zamkniętym układzie regulacji.
ω[obr/min]
Rys. 3: Charakterystyka mechaniczna silnika obcowzbudnego w zamkniętym układzie regulacji ze sprzężeniem prędkościowym.
VII Uwagi i wnioski.
Układy napędowe z prostownikami sterowanymi pracują zwykle w zamkniętych układach regulacji automatycznej z ujemnym sprzężeniem napięciowym lub prędkościowym oraz ograniczeniem prądowym. Układy otwarte stosuje się tylko w wypadku małych wymagań co do sztywności charakterystyk mechanicznych.
W układach napędowych prądu stałego najkorzystniejsza jest regulacja prędkości lub momentu obrotowego poprzez zmianę napięcia zasilającego twornik. Dotychczas używano do tego układów Leonarda lub wzmacniaczy magnetycznych. Jednak obecnie coraz powszechniejsze zastosowanie znajdują układy zawierające elementy półprzewodnikowe. Do zalet tych układów należą:
duża dokładność i sprawność układu,
szeroki zakres regulacji,
płynność regulacji,
mała moc sterowania,
małe koszty eksploatacji i niezawodność
Układy z prostownikami sterowanymi nie są niestety pozbawione wad. Można do nich zaliczyć:
mały współczynnik mocy przy dużym kącie wysterowania tyrystorów,
pulsację prądu i napięcia wyprostowanego,
małą przeciążalność,
generowanie wyższych harmonicznych do sieci zasilającej
Charakterystyka ω=f(ID) jest obrazem zmian prędkości kątowej w zależności od obciążenia. Do pewnej wartości obciążenia silnik pracował przy swojej prędkości znamionowej. Dalsze jego obciążanie powodowało zadziałanie prostownika, który nie pozwalał na przekroczenie bezpiecznej dla silnika wartości prądu twornika - powodował obniżenie napięcia UD , a tym samym prędkości kątowej ω .
Charakterystyka ω = f(ID) jest po części wykreślona teoretycznie (w II, III i IV ćw. układu), ponieważ jest ona symetryczna względem I ćw. układu .
Analizując charakterystyki mechaniczne zamieszczone w skrypcie do tego ćwiczenia można zauważyć, że układ ze sprzężeniem prędkościowym jest „stabilniejszy” od układu ze sprzężeniem napięciowym, tzn. aż do momentu ograniczającego Mogr (czy też prądu Iogr) utrzymuje stałą prędkość znamionową ω0, gdy natomiast ten drugi powoduje niewielki spadek prędkości. Przyczyną tego jest to, iż prędkość silnika zależy nie tylko od napięcia ale również od wartości płynącego prądu (którego układ ze sprzęż. napięciowym nie bierze pod uwagę).
1
Wyszukiwarka