Pytania egzaminacyjne
1. Narysować przykładową strukturę jednokanałowego SP. Podać nazwy przetworników tworzących strukturę.

A/C - przetwornik analogowo - cyfrowy
C/A - przetwornik cyfrowo - analogowy
mikroP - mikroprocesor
2. Omówić parametry części składowych SP, którymi można automatycznie sterować przy zbieraniu i przetwarzaniu sygnałów
???
3. Jakie struktury mają wielokanałowe SP
???
4. Jakie zalety i wady ma układ z pętlą prądową
Pętla prądowa (4-20 mA) jest układem dwuprzewodowej transmisji sygnałów analogowych, w którym prąd jest proporcjonalny do wielkości transmitowanego sygnału .
Z jednej strony mamy sterowane źródło prądowe, na drugim końcu odbiornik (np. opornik na którym następuje konwersja prądu na napięcie). W szczególnym przypadku w szereg można jeszcze włączyć źródło napięcia, wykorzystując te same przewody do zasilania czujnika/nadajnika.
Układ zapewnia odporność na zakłócenia znacznie wyższą od układu transmisji napięcia.
Ma olbrzymią zaletę - w jednym obwodzie masz zasilanie i sygnał. Zakres prądu 4-20 mA. Prąd poniżej 4 mA to uszkodzony obwód , jak powyżej 20 to pewnie zwarcie.
Wada: Struktura sieci punkt-punkt
5. Opisać podstawowe interfejsy stosowane w SP laboratoryjnych i przemysłowych
RS232.
RS-232 jest magistralą komunikacyjną przeznaczoną do szeregowej transmisji danych. Najbardziej popularna wersja tego standardu, RS-232C pozwala na transfer na odległość nie przekraczającą 15 m z szybkością maksymalną 20 kbit/s.
Specyfikacja napięcia definiuje "1" logiczną jako napięcie -3V do -15V, zaś "0" to napięcie +3V do +15V. Poziom napięcia wyjściowego natomiast może przyjmować wartości -12V, -10V, +10V, +12V, zaś napięcie na dowolnym styku nie może być większe niż +25V i mniejsze niż -25V. Należy zaznaczyć przy tym, że zwarcie dwóch styków RS-232 teoretycznie nie powoduje jego uszkodzenia. W praktyce ten zapis w specyfikacji nie zawsze jest przestrzegany.
Typ interfejsu: szeregowy
Transfer: typ. do 115,2 kb/s (w niektórych implementacjach, np. modemy jako karty wewn., do 230,4 kb/s), w trybie synchronicznym do 1Mb/s
Długość magistrali: do ok. 15 m (nie określono w standardzie)
Liczba portów: typowo 1 lub 2
Liczba urządzeń: jedno na każdy port
Rodzaj złącza: DB-9 lub DB-25
Zasilanie przez interfejs: nie
Hot plugging: nie
Standard transmisji szeregowej RS485.
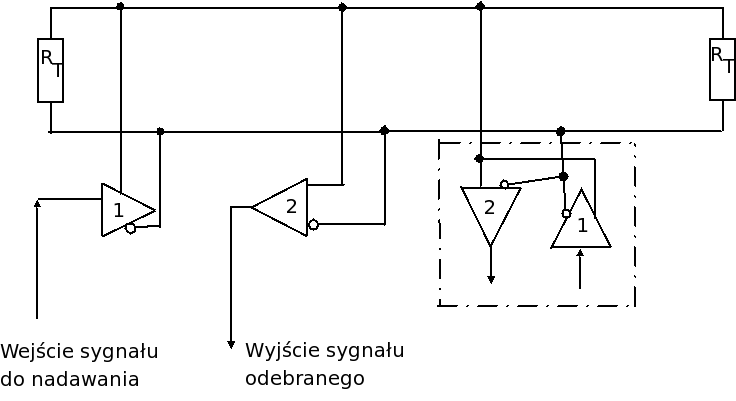
1 - nadajnik;
2 - odbiornik;
Rt - rezystor dopasowujący.
Standard RS485 składa się z różnicowego (symetrycznego) nadajnika, dwuprzewodowego toru transmisyjnego i różnicowego odbiornika. Dla standardu RS485 tak jak i dla RS422 nie ma konieczności prowadzenia przewodu powrotnego. Standard RS485 umożliwia podłączenie wielu nadajników i odbiorników (maksymalnie do 32). Ograniczenie wynika z ograniczeń energetycznych nadajnika. Najczęściej stosowaną topologią dla takich standardów jest topologia magistrali. Zasięg tego standardu to około 1200m. RS485 jest najczęściej stosowanym interfejsem przewodowym w sieciach przemysłowych - z jednego prostego powodu, transmisja różnicowa zapobiega wpływowi zakłóceń zewnętrznych (np. sprzętu indukcyjnego jak silniki) na transmisje danych. Na bazie tego interfejsu opracowano wiele protokołów komunikacyjnych.
RS485 obsługuje 32 nadajniki i 32 odbiorniki (mówimy tu o dwukierunkowej half-duplex wielogałęziowej komunikacji poprzez pojedynczą lub podwójną skrętkę (kabel sygnałowy twisted-pair). Sieć RS-485 może być połączona za pomocą 2 lub 4 przewodów. Maksymalna długość przewodu może wynosić 1200 metrów. Wynika to z systemu transmisji danych opartego na napięciu różnicowym.
W typowym zastosowaniu RS485 pojedynczy komputer klasy PC podłączony jest do kilku adresowalnych urządzeń, współdzielących ten sam kabel.
Maksymalna długość magistrali w systemie interfejsu RS-485 wynosi 1200 m dla szybkości przesyłu danych od 3 do 12 Mbit/s. Długość ta może zostać powiększona do 10 000 m, po zastosowaniu repeaterów (wzmacniaków). Osiąga wtedy szybkość transmisji od 9,6 do 187,5 kbit/s.
IEC625 (IEEE488).
???
Interfejs IEEE488 jest interfejsem równoległym , przeznaczonym specjalnie
do celów pomiarowych. Oprócz linii danych zawiera jeszcze osiem linii sterujących,
które umożliwiają efektywne potwierdzenia, zgłoszenia przerwań i adresowanie.
Interfejs normalizuje również kable połączeniowe. Umożliwia połączenie
do 16 urządzeń . Ważną cechą interfejsu jest protokół potwierdzeń (handshake) za pomocą
trzech przewodów (DAV - data valid, NRFD - not ready for data i NDAC
not data accepted), umożliwiający synchronizację urządzeń o różnej
prędkości działania i transmisji.
???
PROFIBUS.
Profibus - standard sieci przemysłowej czasu rzeczywistego. W sieci może być do 127 sterowników. Rozległość sieci zależy od zastosowanego medium transmisji. Profibus może pracować z następującymi prędkościami transmisji:
* 9600 bit/sek
* 19200 bit/sek
* 93,75 Kbit/sek
* 187,5 Kbit/sek
* 500 Kbit/sek
* 1500 Kbit/sek
* 12000 Kbit/sek
ProfiBus jest siecią deterministyczną. Komunikacja odbywa się na zasadzie master/slave lub master/master.
W standardzie Profibus FMS są dostępne usługi poziomu 2 i 7 wg ISO/OSI. Poziom 2 zapewnia komunikację na poziomie telegramów z potwierdzeniem i bez potwierdzenia typu Broadcast. Poziom 7 zapewnia komunikację na poziomie zmiennych. Sterownik udostępnia szereg zmiennych, stringów, tablic, rekordów podając ich nazwę. Inne sterowniki mogą czytać lub pisać te zmienne w zależności od ustawionych praw. Możliwa jest również kontrola programów na sterowaniu (sterowanie, zatrzymanie, restart itp.). Istnieje ponadto Profibus DP. Jest to transmisja służąca do bardzo szybkiej obsługi zdecentralizowanych urządzeń we/wy. Sterownik przez cały czas non-stop odpytuje lokalne sterowniki we/wy.W warstwie fizycznej PROFIBUS może stanowić przewód dwużyłowy, ekranowany miedziany lub światłowód.
Standard |
EN 50170 Volume 2 PROFIBUS |
Ilość stacji |
Max 127 stacji w sieci |
Metoda dostępu |
- Token bus dla dostępu do magistrali pomiędzy aktywnymi stacjami. |
Prędkość transmisji |
9.6 Kbit/s do 12 Mbit/s |
Medium transmisyjne |
Ekranowany dwużyłowy przewód lub światłowód Miedź: segment
Ze wzmacniaczami
światłowód: (zależnie od typu użytego OLM)
|
Topologia |
magistrala, gwiazda, drzewo lub pierścień |
Usługi |
S7 functions, FDL, FMS, DP |
FIELDBUS (opisany w 6)
CAN (opisany w 6)
6. Rozproszone przewodowe SP
System interfejsu CAN
Podstawowe parametry CAN
Ilość modułów (węzłów) |
Nieograniczona (teoretycznie), w praktyce zależna od parametrów elektrycznych nadajników/odbiorników |
Rodzaj przesyłanych danych |
Obiektowo-zorientowane, multimaster |
Ilość telegramów |
2032 |
Dostęp do szyny |
Według priorytetu telegramu, arbitraż bitowy (CSMA/CA) |
Przepustowość szyny |
Max. 1 Mbit/s |
Praca w czasie rzeczywistym |
Czas odpowiedzi telegramu o najwyższym priorytecie (<134 us, bez błędu) |
Bezpieczeństwo |
Środki programowe:
Środki sprzętowe:
|
Topologia |
Magistrala, gwiazda; |
Medium transmisyjne |
Przewód miedziany (skrętka), światłowód |
Długość szyny |
Zależna od szybkości przesyłu danych (do 10 km); |
Fieldbus
Foundation Fieldbus działa na podobnej zasadzie co ethernetowa sieć komputerowa. Zarówno urządzenie pomiarowe jak i karta systemu DCS są równorzędnymi serwerami danych z dwustronną komunikacją. Na jednym segmencie możemy umieścić do 32 urządzeń (dla Fieldbus H1). Przewodem transmisji danych dostarczane jest również zasilanie.
Rozróżnia się dwa typy sieci Foundation Fieldbus:
* Fieldbus H1 - (podstawowa) pracuje z szybkością 31.25 kbit/s, stosowana w przemysłowych układach regulacji. Może być stosowana w strefach zagrożonych wybuchem.
* HSE (high speed ethernet) - szybka sieć 100 Mb/s min dla sterowania zaawansowanego czy łączenia kontrolerów.
Producenci urządzeń Foundation Fieldbus zrzeszeni są w Fundacji. Każde urządzenie wprowadzone na rynek musi być przebadane i zaaprobowane przez Fundację.
Cechy protokołu
Protokół ten oprócz podstawowej informacji pomiarowej zapewnia:
* obniżenie i uproszczenie okablowania
* zmniejszcenie ilości separatorów iskorobezpiecznych w strefach zagrożonych wybuchem.
* podwyższenie dokładności pomiaru (eliminacja części błędów przetwarzania)
* zdalną konfigurację urządzeń on-line
* diagnostykę urządzeń (diagnostyka zaworów regulacyjnych poprzez ustawnik pozycyjny)
* diagnostykę maszyn i urządzeń poprzez analizę szumów pomiarowych np. diagnostyka pomp poprzez przetworniki pomiarowe lub też przepływomierze
* realizację pętli regulacji bezpośrednio w urządzeniu pomiarowym lub zaworze (ang. Control in the Field), co umożliwia bezprzerwowe działanie procesu nawet w przypadku awarii DCS.
* redundancję urządzeń
Normy
Foundation H1 - IEC 61158
Fieldbus HSE - IEC 61131-3.
Foundation H1 - EN 50170 Euronorm
MicroLAN
Interfejs szeregowy MicroLAN
Rozwiązanie proponowane przez firmę Dallas Semiconductor, opierające się na komunikacji jedno-przewodowej (1-Wire bus) nadrzędnego urządzenia master z urządzeniami 1-Wire. Rozwiązanie poparte szeregiem praktycznych realizacji narzędzi 1-Wire np. produktów z serii Touch Memories DS19xx. Sieć MicroLAN składa się z trzech zasadniczych elementów :
* nadrzędnego urządzenia master przyłączonego do szyny komunikacyjnej za pośrednictwem wyjścia typu 'otwarty dren', wykonującego logiczny iloczyn na przewodzie używającego rezystora podciągającego (ang. pull-up resistor) do nominalnego napięcia 5[V] zasilającego urządzenie master
* pojedyncza, dwukierunkowa magistrala umożliwiająca komunikację pomiędzy urządzeniem master i narzędziami 1-Wire, spełniająca wszelkie wymagania czasowe dla przesyłu danych na wymagane odległości
* narzędzi typu slave dopasowanych do standardu 1-Wire, mogących się komunikować za pomocą dwukierunkowej magistrali z urządzeniem master za pośrednistwem protokołu 1-Wire Protocol.
Narzędziami przeznaczonymi do pracy z siecią MicroLAN jest między innymi rodzina produktów nazwana Touch Memory. Produkty komunikują się za pośrednictwem wspólnego pojedynczego przewodu, przesyłając specyficzną sekwencję komend rekomendowaną dla 1-Wire Protocol. Każdy element rodziny charakteryzuje się numerem identyfikacyjnym (ang. Unique Serial Number) oraz kodem całej rodziny (ang. Family Code). Unikalny numer podzespołu może być wykorzystywany jako adres dla narzędzia w magistrali 1-Wire. Uzupełnieniem 8 bajtowego komunikatu w sieci MicroLAN z udziałem narzędzi Touch Memory serii DS19xx jest bajt kontrolny CRC, wymagający od nadrzędnych urządzeń odpowiednich algorytmów przeliczeniowych.
Magistrala MicroLAN zgodna z protokołem 1-Wire dla produktów Touch Memory reprezentuje przy zapisie logiczne zero jako impuls o niskim poziomie i czasie trwania minimum 60[mikros.] (tzw. Write 0), logiczną jedynkę natomiast jako impuls o niskim poziomie i czasie trwania maksimum 15[mikros.] (tzw. Write 1). Magistrala czyta z rejestrów Touch Memory podciągając niską linię danych kiedy jest uwolniona, monitorując warunki panujące na niej. Dla Touch Memory sygnał do czytania logicznego zera (Read 0) jest niskim impulsem z przedziałem czasu, trwającym minimum 15[mikros.], dla opadającego, początkowego zbocza. Odczytywany sygnał Read 1 jest przedziałem czasu, pozwalającym linii danych na powrót do wysokiego stanu przez rezystor podciągający. Czas pomiędzy kolejnymi przedziałami czasu musi być równy minimum 1[mikros.].
Jako urządzenie master, może być wykorzystany dowolny szeregowy port typu otwarty dren, mogący współpracować z rezystorami podciągającymi (np. wyprowadzenie 3 portu 0 mikrokontrolera DS5000) lub inny odpowiednio zaadaptowany standardowy port szeregowy.
Ponieważ nie jest możliwe idealne dopasowanie przewodów komunikacyjnych sieci MicroLAN do narzędzi (np. Touch Memory), należy się liczyć z odbiciami w trakcie znacznego niedopasowania, mogącymi wywołać błędy. Chcąc wprowadzić tolerancję niedopasowania należy przewidzieć możliwe opóźnienia, zastosować prawidłowe okablowanie oraz odpowiednio dobrać rezystory podciągające. Komunikację może przerwać również całkowita, nadmierna pojemność sieci MicroLAN, która wraz z rezystancją R wprowadzi stałą czasową (RC) przekraczającą przedziały czasowe zdefiniowane przez protokół komunikacyjny.
Przy kontrolowanych opóźnieniach (rzędu 3-4[mikros.]), aktywnych elementach podciągających i prawidłowym okablowaniu (np. wyselekcjonowanych kabli telefonicznych, skrętki kategorii 5 lub kabli zgodnych z IEEE 1394 tzw. ,,Firewire") zakłada się bezbłędną komunikację 500 różnych 1-Wire narzędzi na odcinku 300[m] z szybkością ~16[kbitów/s].
Dodatkowe źródło: http://www.forum.elektronika.xorg.pl/index.php?showtopic=202
7. SP w sieci telekomunikacji ruchomej
GSM
GSM (ang. Global System for Mobile Communications) jest najpopularniejszym obecnie standardem telefonii komórkowej. Sieci oparte na tym systemie telekomunikacji oferują usługi związane z transmisją głosu, danych (na przykład dostęp do Internetu) i wiadomości w formie tekstowej lub multimedialnej.
Transmisja danych
Pierwsze specyfikacje GSM opisywały przesyłanie danych o prędkości transmisji 9,6 kb/s (Circuit Switched Data - CSD). Polegało to na zajęciu jednej szczeliny czasowej przyznanej przez Kontroler Stacji Bazowych dokładnie w ten sam sposób jak dla zwykłej rozmowy. Kolejne rozwiązanie nazywane High Speed Circuit Switched Data (HSCSD) dzięki innemu systemowi kodowania i korekcji błędów dawało możliwość osiągnięcia prędkości transmisji 14,4 kb/s w jednej szczelinie czasowej. Na potrzeby jednej transmisji można było ich przydzielić aż cztery, co dawało 57,6 kb/s. Tego typu rozwiązania miały jednak podstawową wadę: na czas połączenia przyznawane były całe kanały cyfrowe, użytkownik zajmował je nawet w momencie, gdy nie wysyłał ani nie odbierał danych, było to, więc rozwiązanie kosztowne.
Nowe możliwości pojawiły się wraz z rozwojem technologii GPRS, która została zintegrowana z siecią GSM i stała się częścią tego standardu. Oferuje ona pakietowe przesyłanie danych, dzięki czemu użytkownik nie zajmuje tylko dla siebie całego kanału cyfrowego i płaci za faktycznie wysłane/odebrane dane. Osiągana w praktyce prędkość transmisji to 30 - 80 kb/s. Rozszerzeniem technologii GPRS jest EDGE, który oferuje jeszcze większą prędkość transmisji i uważany za alternatywę dla telefonii UMTS, która nie wymaga inwestycji w licencje związane z nowymi częstotliwościami oraz w kosztowną rozbudowę sieci radiowych.
Opis elementów sieci
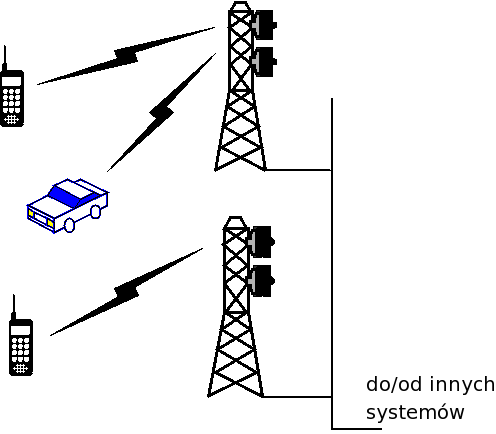
* Komórka (ang. cell) jest obszarem obsługiwanym przez stację bazową. Jej maksymalny rozmiar opisany jest w specyfikacji GSM. Faktyczny rozmiar i kształt zależy od warunków zewnętrznych (ukształtowanie terenu, wysokość masztu, warunki propagacji fal radiowych) oraz od konfiguracji parametrów stacji bazowej (np. moc nadawania sygnału). Operator dostosowuje rozmiar komórek do obserwowanego na danym terenie natężenia ruchu telekomunikacyjnego - tam gdzie ono jest większe, rozmiar komórek jest mniejszy (ilość rozmów obsługiwanych przez jedną stację bazową jest ograniczona).
* System stacji bazowych (ang. Base Station System, BSS)
o Stacja Bazowa (ang. Base Transceiver Station, BTS) jest elementem sieci (tzw. stacją przekaźnikową), który jest interfejsem pomiędzy telefonem komórkowym a siecią GSM. Dzięki systemowi anten t ransmituje i odbiera na kilku częstotliwościach (liczba zależąca od konfiguracji sprzętowej i oprogramowania) zakodowany cyfrowo sygnał. Częstotliwości używane przez stacje bazowe obsługujące sąsiadujące komórki różnią się, aby nie dochodziło do interferencji fal radiowych. Zwykle od kilkudziesięciu do kilkuset stacji bazowych j est podłączonych do jednego Kontrolera Stacji Bazowych.
o Kontroler Stacji Bazowych (ang. Base Station Controler, BSC) jest elementem sieci, odpowiedzialnym za zarządzanie stacjami bazowymi, oraz transmisję danych pomiędzy stacjami bazowymi a resztą sieci. Z poziomu BSC Operator zarządza radiową częścią sieci, zmieniając parametry poszczególnych stacji bazowych. BSC odpowiedzialne też jest za przydzielanie telefonowi komórkowemu wolnej szczeliny czasowej na odpowiedniej częstotliwości oraz za śledzenie jakości rozmowy. W razie jej pogorszenia, np. gdy abonent oddala się od obsługującej go stacji bazowej, zostanie przydzielona mu inna częstotliwość obsługiwana przez inną stację bazową, oraz odpowiednia szczelina czasowa. Mechanizm ten nazywa się handover. Kilka BSC jest podłączonych do jednego MSC.
* Część komutacyjno sieciowa (ang. Network and Switching Subsystem - NSS)
o Mobile Switching Centre (MSC) jest cyfrową centralą telefoniczną przystosowaną do pracy w sieci GSM. Jest odpowiedzialna za zestawianie połączeń i koordynacje współpracy pomiędzy elementami sieci. Liczba MSC w sieci zależy od ilości abonentów i generowanego przez nich obciążenia sieci.
o Gateway Mobile Switching Centre (GMSC) jest to centrala MSC z dodatkową funkcjonalnością odpowiedzialną za kontaktowanie się z HLR. Każda rozmowa podczas zestawiania połączenia do abonenta danej sieci musi być przeroutowana do jednego z GMSC należącego do niej (nawet gdy abonent jest w tym czasie w roamingu w innej sieci) w celu zebrania informacji o użytkowniku, którego numer wybrano w celu rozpoczęcia rozmowy. Od operatora zależy, które (np. wybrane MSC lub wszystkie MSC w sieci) będą działać jako GMSC (co zazwyczaj jest kwestią dodatkowej konfiguracji). Niektóre GMSC mogą działać jako centrale tranzytowe do innych sieci.
o Home Location Register (HLR - rejestr stacji własnych) jest bazą danych, która przechowuje informacje o abonentach, którzy należą do danej sieci. Między innymi numer IMSI, MSISDN, informacje o wykupionych usługach, informacje o MSC, które aktualnie obsługuje abonenta, informacje o jego statusie (np. telefon jest wyłączony, telefon jest włączony do sieci). Ilość HLR w sieci zależy od ilości abonentów.
o Authentication Centre (AuC) to element sieciowy przechowujący dane abonentów danej sieci, na bazie których dokonuje uwierzytelnienia numeru IMSI i zezwala danemu abonentowi logującemu się do sieci na korzystanie z zasobów radiowych. Authentication Centre powiązane jest z HLR, ich liczba zależy od ilości użytkowników danej sieci.
o Visitor Location Register (VLR - rejestr abonentów przyjezdnych) - baza danych związana z MSC. W sieci istnieją zawsze pary MSC-VLR. Baza ta przechowuje informacje o abonentach, którzy w danym momencie znajdują się na obszarze obsługiwanym przez to MSC. Część z tych informacji jest kopiowana z HLR w momencie, gdy abonent pojawia się w "zasięgu" danego MSC, inne, takie jak jego lokalizacja są zmieniane już później.
o Flexible Number Register (FNR) - opcjonalny element sieci wykorzystywany w mechanizmie Number Portability, znanym jako "przenoszenie numeru pomiędzy operatorami". Jest to baza danych wszystkich abonentów w sieciach GSM w danym kraju. Przechowuje informacje o numerze abonenta, który dzięki temu można zachować zmieniając sieć; aktualnym operatorze, którego abonent jest klientem; numer, pod który należy przekierować rozmowę (poprzez GMSC) do tego operatora.
o SMS Center (SMSC) - element sieci biorący udział w przesyłaniu SMS- ów pomiędzy abonentami i przechowujący te wiadomości, które nie mogą być w danej chwili dostarczone. Np. abonent jest poza zasięgiem lub ma wyłączony telefon.
* Service Control Point (SCP) - element sieci, na którym oparte są sieci inteligentne. Działające na nim serwisy związane są z usługami dodanymi, które mogą być wykupione przez abonenta, np. Virtual Private Network lub Prepaid. SCP komunikuje się z MSC dzięki protokołom SS7 i może wpływać na zestawianą rozmowę: wpływ na sposób naliczania opłat, przekierowanie do innego numeru, dołączenie do rozmowy dodatkowego abonenta itp. MSC może i nformować SCP o różnych zdarzeniach związanych z rozmową (np. abonent, do którego kierowana jest rozmowa, jest zajęty, nie podnosi słuchawki itp.) i na tej podstawie, podejmowane są dalsze decyzje co do tej rozmowy.
* Service Data Point (SDP) - baza danych, która zawiera informacje o abonentach wykorzystywane przez programy działające na platformie Sieci Inteligentnych. Np. program Prepaid przechowuje tam informacje o ilości dostępnych impulsów.
Zakres częstotliwości na których „pracuje” GSM:
- 900 MHz;
- 1800 MHz;
- 1900 Mhz;
Pojedyńcza stacja bazowa może obsługiwać od 300 - 1000 odbiorców.
Odbiornik może się poruszać z prędkością do 250 km/h (120 km/h przy większych częstitliwościach).
UMTS (Universal Mobile Telecommunications System)
Universal Mobile Telecommunications System (UMTS ang. Uniwersalny System Telekomunikacji Ruchomej) to system telefonii komórkowej trzeciej generacji, będący następcą systemów 2G takich jak GSM. Dzięki nowemu interfejsowi radiowemu polepszony został znacznie transfer danych pomiędzy abonentem a siecią, co zaowocowało poprawą jakości oferowanych usług.
System UMTS może być budowany "od podstaw", lub powstawać na bazie wcześniej zbudowanych sieci GSM (tak zwany rollout sieci). Za rozwój specyfikacji UMTS odpowiedzialne jest konsorcjum standaryzacyjne 3GPP.
Sieci UMTS są naturalnym następcą GSM. Konsorcjum 3GPP rozwija równocześnie oba standardy, wiele specyfikacji związanych z siecią szkieletową jest wspólnych. Cyfrowe centrale MSC, które służą do zestawiania połączeń głosowych w GSM, są też wykorzystywane do tego celu w sieciach UMTS. W okresie przejściowym, gdy usługi UMTS są dopiero uruchamiane, operatorzy mogą do zestawiania połączeń 3G wykorzystywać centrale z sieci GSM, potem budowana jest jednak osobna sieć szkieletowa, która przejmuje obsługę rozmów inicjowanych za pomocą sieci trzeciej generacji. Sieć szkieletowa zbudowana dla obsługi ruchu pakietowego generowanego przez zaimplementowane w GSM technologie GPRS/EDGE używana jest również w sieci UMTS. Gdy operator rozbudowuje równocześnie oba rodzaje sieci, używa jednej wspólnej sieci wspomagającej komutacje pakietów. Także usługi bazujące na platformie sieci inteligentnych (np. serwisy Prepaid) mogą działać tak samo dla obu rodzajów sieci dzięki technologii CAMEL.
To co najbardziej odróżnia oba standardy to sieć radiowa. Zupełnie inne technologie użyte do jej budowy sprawiają, że dla obu rodzajów sieci rozbudowywany jest osobny system stacji bazowych. Niestety podczas planowania struktury sieci radiowej UMTS, operator nie może oprzeć się na istniejącej infrastrukturze masztów używanych w GSM, ponieważ rozmiar komórki (ang. cell) w standardzie UMTS jest znacznie mniejszy. Oznacza to budowanie od podstaw nowej sieci masztów i nadajników.
Dla innych systemów 2G również przewidziany jest proces tzw. rolloutu sieci do standardu UMTS. Przesyłanie danych zostało w nich zaimplementowane na bazie stworzonej dla potrzeb GSM technologii EDGE, trwają prace nad dalszą rozbudową tych systemów i w konsekwencji nad migracją do UMTS.
Architektura sieci UMTS
Architektura sieci dostępu radiowego UTRAN
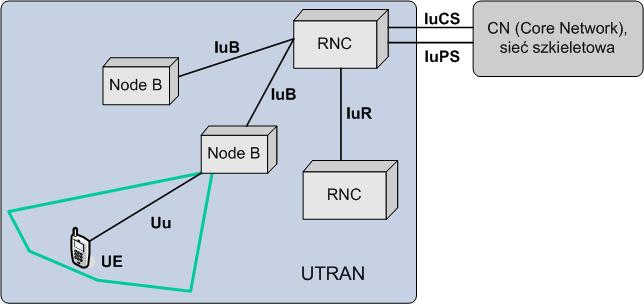
Interfejs radiowy UTRAN
Interfejs radiowy UMTS w literaturze określany jako UTRAN (ang. UMTS Terrestrial Radio Access Network) oparty jest na technologii szerokopasmowego wielodostępu do kanału w dziedzinie kodu (WCDMA). Z tego faktu wynika fundamentalne ograniczenie dostępnych zasobów radiowych i, co się z tym wiąże, pojemności tego interfejsu. Tymi zasobami są (z punktu widzenia stacji bazowej, czyli node'a-B):
* Poziom zakłóceń odbieranych (ang. interference) - dla kierunku "w górę" (ang. uplink)
* Poziom mocy nadajnika - dla kierunku "w dół" (ang. downlink)
W obu przypadkach można wykazać, że minimalny poziom jakości sygnału odbieranego jest zależny od stosunku mocy sygnału odbieranego do mocy zakłóceń. Po uwzględnieniu cech specyficznych interfejsu UTRAN to pierwotne założenie można przekształcić do postaci łączącej poziom zakłóceń (lub moc nadajnika) w komórce UMTS z ilością użytkowników systemu (parametrami ich usług i dla kierunku "w dół" ich położeniem), a więc z poziomem obciążenia interfejsu. W obu przypadkach przyrost zasobów jest nieliniowy (typu f(x)=a/(1-x)) i dla pewnego poziomu obciążenia osiąga nieskończoność. Ten poziom (różny dla obu kierunków) określa maksymalną pojemność komórki UMTS. Trzeba pamiętać, że przedstawiony model zakłada istnienie idealnych warunków. Jeśli uwzględni się ograniczenia techniczne (np. ograniczoną moc nadajnika w terminalu użytkownika), wówczas pojemność interfejsu UTRAN jest niższa. Charakterystyczną cechą interfejsu UTRAN jest uzależnienie zasięgu komórki od natężenia ruchu w komórce zjawisko to jest znane jako oddychanie komórek.
Sieć szkieletowa
Archi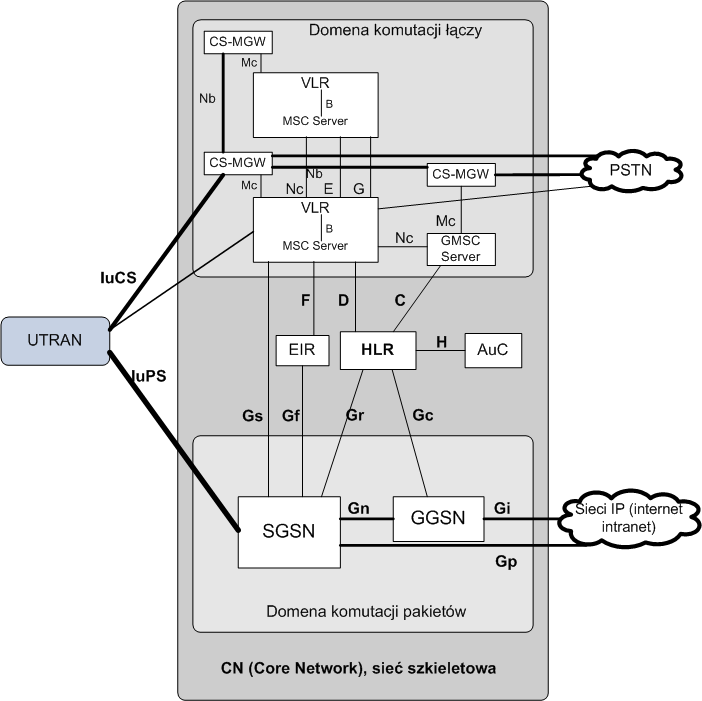
tektura sieci szkieletowej w wersji R4
Zapewnienie mobilności
W sieci UMTS potrzeba dokonania handoveru wynika z konieczności zapewnienia użytkownikowi systemu mobilności. Dokonuje się to, poprzez utrzymywanie kilku najlepszych połączeń radiowych (ang. radio link), tj. połączeń radiowych z tymi komórkami node'a-B, których sygnał odebrany przez terminal jest najlepszy. Maksymalna liczba połączeń radiowych, zwana również rozmiarem Active Set'u, najczęściej wynosi 3. Kryteria brane pod uwagę w procesie podejmowana decyzji o handoverze to: jakość sygnału kanału pilota (Ec/N0) i poziom sygnału kanału pilota (RSCP).
Sieć UMTS umożliwia wykonanie handoverów typu: hard i soft. W hard rozróżnia się interfrequency handover - zmiana kanału częstotliwościowego w UMTS - może być pomiędzy node'ami B, jak również w obrębie node'a B; intersystem - zmiana technologii dostępu radiowego (ang. RAT - radio access technology) np. z UMTS na GSM. Są 3 odmiany soft handoveru: soft - stan, w którym terminal komunikuje się jednocześnie z więcej niż jedną komórką UMTS i komórki te należą do różnych node'ów B; softer- stan, w którym terminal komunikuje się jednocześnie z więcej niż jedną komórką UMTS i komórki te należą do tego samego node'a B; soft-softer- gdy oba powyższe warunki są spełnione.
Sterowanie mocą
Generalna idea przyświecająca sterowaniu mocą polega na utrzymaniu mocy emitowanej tuż powyżej wartości, która zapewnia że połączenie realizowane jest z odpowiednią jakością obsługi (QoS). CDMA działa należycie gdy ograniczone są interferencje między emisjami użytkowników. Nadawanie ze zbyt dużą mocą zmniejsza zatem pojemność systemu. Sterowanie mocą pomaga zmniejszyć interferencje między użytkownikami a tym samym maksymalnie wykorzystać pojemność systemu. W UMTS steruje się mocą kanałów zarówno w górę jak i w dół.
Sterowanie mocą odbywa się przy pomocy trzech mechanizmów:
* sterowanie mocą w otwartej pętli (Open Loop Power Control)
* sterowanie mocą w pętli zamkniętej (Closed Loop Power Control)
* sterowanie mocą w pętli zewnętrznej (Outer Loop Power Control)
W założeniu (ideał sieci) UMTS ma być siecią o zasięgu globalnym.
UMTS „pracuje” w zakresie 1950 - 2150 MHz.
Usługi UMTS |
Prędkość transmisji |
Elementowa stopa błędu. |
Telefonia |
8-32 kbit/s |
10 |
Wideotelefonia |
64-384 kbit/s |
|
Dane w paśmie akustycznym |
2,4-64 kbit/s |
|
SMS przywołanie |
1,2-9,6 kbit/s |
|
Dane cyfrowe |
64-1920 kbit/s |
|
Dostęp do bazy danych |
2,4-768 kbit/s |
|
Zdalne sterowanie |
1,2-9,6 kbit/s |
|
8. SP z łączami radiowymi
Bluetooth
Bluetooth - technologia bezprzewodowej komunikacji krótkiego zasięgu pomiędzy różnymi urządzeniami . Specyfikacja informuje o zasięgu około 10 m, choć w praktyce, w otwartym terenie, może on wynieść nawet do 200 m. Używa fal radiowych w paśmie ISM 2,4 GHz. Urządzenie umożliwiające wykorzystanie tej technologii to adapter Bluetooth.
Architektura systemu Bluetooth.
Podstawową jednostką technologii Bluetooth jest pikosieć (ang. piconet), która zawiera węzeł typu master oraz maksymalnie 7 węzłów typu slave. Wiele pikosieci może istnieć w jednym pomieszczeniu, a nawet mogą być ze sobą połączone przy pomocy węzła typu bridge. Połączone ze sobą pikosieci określa się mianem scatternet.
Połączone dwie pikosieci - scatternet.
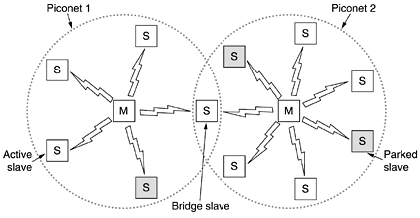
Dodatkowo, oprócz siedmiu węzłów typu slave, w jednej pikosieci może pracować do 255 węzłów, pozostających w stanie synchronizacji z urządzeniem typu master . Urządzenia te nie uczestniczą w wymianie danych. Mogą tylko otrzymać sygnał aktywacyjny lub nawigacyjny od węzła typu master.
Istnieją jeszcze dwa przejściowe stany hold oraz sniff. Przyczyną podziału węzłów na master i slave jest minimalizacja kosztów technologii. Konsekwencją tego jest fakt, że węzły typu slave są w 100% podporządkowane węzłom master. Pikosieć jest scentralizowanym systemem TDM, urządzenie master kontroluje zegar i określa, które urządzenie i w którym slocie czasowym może się z nim komunikować. Wymiana danych może nastąpić tylko pomiędzy węzłem master i slave. Komunikacja slave - slave nie jest możliwa.
Zasięg
Zasięg urządzenia determinowany jest przez klasę mocy:
* klasa 1 (100 mW) ma największy zasięg, do 100 m,
* klasa 2 (2,5 mW) jest najpowszechniejsza w użyciu, zasięg do 10 m
* klasa 3 (1 mW) rzadko używana, z zasięgiem do 1 m.
Transfer
* Bluetooth 1.0 - 721 kb/s
* Bluetooth 1.1 - 721 kb/s
* Bluetooth 1.2 - 721 kb/s
* Bluetooth 2.0 - transfer maksymalny przesyłania danych na poziomie 2,1 Mb/s, wprowadzenie Enhanced Data Rate wzmocniło transfer do 3,0 Mb/s
Warstwy protokołu w systemie Bluetooth
Standard Bluetooth określa wiele protokołów, pogrupowanych w warstwy. Struktura warstw nie odpowiada żadnemu znanemu modelowi (OSI, TCP/IP, 802). IEEE prowadzi prace nad zmodyfikowaniem systemu Bluetooth, aby dopasować go do modelu określonego standardem 802.
Architektura protokołów Bluetooth.
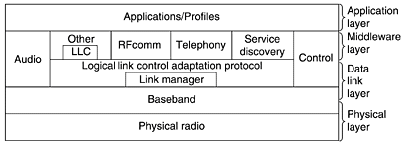
Najniższa warstwa - fizyczna warstwa radiowa - odpowiada warstwie fizycznej łącza danych. Określa ona transmisje radiową oraz modulację stosowaną w systemie. Warstwa druga - baseband layer - jest zbliżona do podwarstwy MAC modelu OSI, ale zawiera także elementy warstwy fizycznej. Określa ona w jaki sposób urządzenie master kontroluje sloty czasowe i jak sloty są grupowane w ramki. Kolejna warstwa grupuje powiązane ze sobą protokoły. Link manager zajmuje się ustanowieniem logicznych kanałów między urządzeniami, zarządzaniem energią oraz jakością usługi(QoS). Link control adaptation protocol, często nazywany L2CAP, zajmuje się szczegółowymi parametrami transmisji, uwalniając w ten sposób wyższe warstwy od tego obowiązku. Jak wskazują nazwy, protokoły audio i control zajmują się dźwiękiem oraz kontrolą. Aplikacje mogą z nich korzystać pomijając protokół L2CAP. Kolejna warstwa jest warstwą przejściową, zawierającą mieszaninę różnych protokołów. Podwarstwa LLC standardu 802, została wstawiona tu przez IEEE, w celu zapewnienia kompatybilności z sieciami 802. RFcomm (Radio Frequency communication) jest protokołem, który emuluje standardowy port szeregowy do podłączenia klawiatury, myszy, modemu oraz innych urządzeń. Protokół telephony jest protokołem czasu rzeczywistego, używanym w profilach zorientowanych na rozmowy. Zarządza również zestawieniem i rozłączeniem połączenia. Protokół discovery service jest używany do umiejscowienia usługi wewnątrz sieci. W ostatniej warstwie umiejscowione są aplikacje oraz profile. Używają one protokołów warstw niższych. Każda aplikacja ma swój podzbiór używanych protokołów, zazwyczaj korzysta tylko z nich i pomija inne.
Warstwa radiowa
Warstwa ta odpowiedzialna jest za transport danych od urządzenia master do slave i vice versa. Jest to system o małym poborze mocy, działający w zależności od klasy na różnych zasięgach, operujący w paśmie ISM 2,4 GHz. Pasmo jest podzielone na 79 kanałów, po 1MHz każdy. System wykorzystuje modulacje FSK (Frequency Shift Keying), dając prędkości transmisji 1 Mbit/s, jednak duża cześć tego widma jest zajęta przez nagłówek. Aby przydzielić kanały sprawiedliwie, wykorzystuje się skakanie częstotliwości (1600 skoków na sekundę). Sekwencję skoków dyktuje węzeł master. Systemy 802.11 oraz Bluetooth operują na tych samych częstotliwościach z takim samym podziałem pasma na 79 kanałów. Z tego powodu zakłócają się wzajemnie. Ponieważ skoki częstotliwości są znacznie szybsze w systemie Bluetooth, jest znacznie bardziej prawdopodobne, że system ten będzie zakłócał transmisje w 802.11.
Baseband layer
Warstwa ta jest zbliżona do podwarstwy MAC modelu OSI. Upakowuje ona luźne bity w ramki. Master w każdej pikosieci definiuje sloty czasowe o długości 625 μs. Transmisja mastera zaczyna się od slotów parzystych natomiast transmisja slave od slotów nieparzystych. Jest to tradycyjna multipleksacji w dziedzinie czasu (TDM), gdzie master zajmuje połowe slotów, a slave pozostałą ich część. Ramki mogą mieć długość jednego, trzech lub pięciu slotów czasowych.
Skakanie częstotliwości pozwala ustawić czas 250 - 260 μs na skok, aby umożliwić stabilizacje układów radiowych. Dla ramki składającej się z jednego slotu czasowego, po tym czasie, zostaje 366 z 625 bitów. 126 z nich zawierają kod dostępu oraz nagłówek, pozostałe 240 są dla danych. Gdy ramka składa się z pięciu slotów, tylko jeden okres stabilizacji jest wymagany i dla warstwy baseband pozostaje 2781 bitów, więc dłuższe ramki są znacznie bardziej efektywne niż ramki zbudowane z jednego slota czasowego. Każda ramka jest transmitowana przez kanał logiczny, nazywany z angielskiego link, pomiędzy masterem i urządzeniem slave. Istnieją dwa rodzaje kanałów logicznych. Pierwszy nazywa się ACL (Asynchronous Connection-Less), używany w połączeniu z komutacją pakietów, gdzie dane są dostępne w nieregularnych odstępach czasu. Dane te pochodzą od warstwy L2CAP po stronie nadawczej i są dostarczane do warstwy L2CAP po stronie odbiorczej. W tej wersji kanału logicznego nie ma żadnych gwarancji, ze ramka dotrze do celu. Ramki mogą zostać utracone i wymagać retransmisji. Urządzenie slave może mieć tylko jeden kanał typu ACL z urządzeniem master. Drugi typ kanału logicznego nazywa się SCO (Synchronous Connection Oriented) i jest używany do transmisji w czasie rzeczywistym, np. rozmowy telefonicznej. Ramki transmitowane w tego typu kanale, nie mogą być retransmitowane. Zamiast tego można stosować korektę błędów, aby zapewnić wysoką niezawodność. Urządzenie slave może korzystać z maksymalnie trzech kanałów typu SCO w kierunku mastera. Każde łącze SCO może transmitować jeden kanał telefoniczny (PCM, 64 kbit/s).
Warstwa L2CAP
Warstwa L2CAP spełnia trzy główne funkcje:
1. przyjmuje pakiety o maksymalnym rozmiarze do 64 KB od wyższych warstw i dzieli je na ramki w celu transmisji. Na końcu ramki są ponownie składane w całość;
2. zajmuje się multipleksacją i demultipleksacją złożonych pakietów. Gdy pakiet jest składany w całość, warstwa L2CAP określa, któremu protokołowi warstwy wyższej go przekazać, np. do RFcomm lub telephony;
3. zajmuje się wymaganiami na jakość usługi, zarówno podczas zestawiania połączenia oraz podczas realizacji usługi.
Struktura ramki
Istnieje kilka formatów ramki w systemie Bluetooth. Zaczyna się ona kodem dostępu, który identyfikuje mastera, tak aby slave znajdujący się w zasięgu dwóch urządzeń master mógł określić, do którego odbywa się transmisja. Następne 54 bity stanowią nagłówek ramki, który zawiera standardowe pola podwarstwy MAC. Na końcu pojawia się maksymalnie do 2744 (dla ramki składającej się z 5 slotów) bitów zawierających dane. Dla transmisji jednoslotowej ramka zawiera 240 bitów pola danych.
Struktura ramki w systemie Bluetooth.
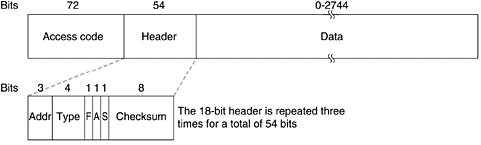
Pole adres nagłówka identyfikuje jedno z ośmiu aktywnych urządzeń, dla którego przeznaczona jest ramka. Pole typ określa typ ramki (ACL, SCO, pool albo null), rodzaj korekcji błędów używany w polu danych oraz liczbę slotów w ramce. Pole Flow jest ustawiane przez slave, gdy jego bufory są pełne i nie może on przyjąć więcej danych. Bit Acknowledgement jest potwierdzeniem transmisji. Bit Sequence jest używany w celu numeracji ramek aby wykryć retransmisje. Ostatnie 8 bitów to suma kontrolna. 18 bitów nagłówka są powtarzane trzy razy dając w efekcie nagłówek 54 bitowy. Po stronie odbiorczej prymitywny układ sprawdza wszystkie trzy kopie każdego bitu. Jeśli wszystkie są takie same, wówczas bit jest zaakceptowany. Jeśli nie, to jeżeli otrzymano dwa 0 i jedną 1, wartość końcowa jest 0, jeśli zaś dwie 1 i jedno 0, to jedynka.
ZigBee.
ZigBee - specyfikacja protokołów transmisji danych w sieciach bezprzewodowych typu mesh, cluster tree. Sieci oparte na ZigBee charakteryzują się niewielkim poborem energii, niewielkimi przepływnościami (do 250kbps) oraz zasięgiem między węzłami rzędu do 100 m. Typowymi zastosowaniami są sieci sensorowe, sieci personalne (WPAN), automatyka domowa, systemy alarmowe, systemy monitoringu.
Specyfikacja ZigBee dla niższych warstw PHY i MAC wykorzystuje standard IEEE 802.15.4, który zapewnia transmisję bezprzewodową w pasmach 868 MHz, 915 MHz lub 2,4 GHz. Metoda dostępu do medium to CSMA/CA. Modulacja dla 868/915 MHz to BPSK, a dla 2,4 GHz to O-QPSK. W paśmie 2,4 GHz przewidziano 16 kanałów szerokości 5MHz.
Urządzenia ZigBee można podzielić na 3 typy:
* koordynator (ZigBee Coordinator - ZC): dla każdej sieci może występować tylko jedno takie urządzenie, służy jako węzeł początkowy do którego mogą się przyłączać pozostałe urządzenia, zazwyczaj pełni rolę urządzenia zbierającego dane.
* router (ZigBee Router - ZR): przekazuje pakiety dalej, umożliwia wiele przeskoków (multihop routing).
* urządzenie końcowe (ZigBee End Device - ZED): przesyła dane do routera do którego jest przyłączone, może być czasowo usypiane w celu zmniejszenia zużycia energii.
Technologia ZigBee jest rozwijana przez ZigBee Alliance. Jest to organizacja zrzeszająca ponad 150 firm z całego świata w celu wspólnego rozwoju specyfikacji ZigBee.
HomeRF
HomeRF (HOME Radio Frequency) - bezprzewodowa technika konstruowania sieci komputerowych opracowana przez HomeRF Working Group z Portland w Oregon, która została założona w 1998 r. przez firmy Compaq, IBM, HP i inne.
Otwarty standard HomeRF korzystał z protokołu Shared Wireless Access Protocol (SWAP) do transmisji w nielicencjonowanym pasmie 2.4 GHz między urządzeniami przenośnymi i stajonarnymi, na odległość do ok. 50 m, z szybkością 1 lub 2 Mbps. Możliwe było adresowanie do 127 urządzeń. Będąc pochodną Digital European Cordless Telephone (DECT), HomeRF korzystał z techniki przeskakiwania częstotliwości (50 razy na sekundę). Każda 20-milisekundowa ramka zawierała jeden slot CSMA/CA na dane i sześć pełnodupleksowych slotów TDMA na głos.
HomeRF 2.0, pracujący z prędkością do 10 Mbps, jest standardem zapewniającym wysokowydajną łączność bezprzewodową dla domowych zastosowań multimedialnych i jedynym obsługującym wysokiej jakości przesyłanie głosu. Użytkownicy HomeRF 2.0 mogą przesyłać głos, dane oraz strumienie audio-wideo pomiędzy różnymi produktami HomeRF służącymi do pracy i zabawy - w tym komputery PC, terminale WEB, urządzenia PDA, telefony bezprzewodowe, głośniki bezprzewodowe oraz coraz większą ilość urządzeń audio i telewizyjnych. Dla użytkowników domowych, użycie technologii HomeRF oznacz uwolnienie się od zakłóceń pochodzących z urządzeń takich jak kuchenki mikrofalowe, urządzenia Bluetooth, czy pobliskich sieci bezprzewodowych DSSS 2.4 GHz 802.11b. HomeRF jest jedyną bezprzewodową technologią sieciową zaprojektowaną całkowicie dla klienta indywidualnego, skoncentrowaną na takich aspektach jak łatwość instalacji i przystępną cenę. Tak więc produkty HomeRF są proste w użyciu, bezpieczne, niezawodne i nie drogie. W ramach projektu Home Radio Frequency powstał SWAP - Shared Wireless Access Protocol. Opracowany na podstawie IEEE 802.11 i DECT miał jedno zadanie: ograniczyć cenę urządzeń przez stworzenie standardu prostszego od 802.11.
Warstwa fizyczna jest jedna, oparta na FHSS. Jednocześnie, zgodnie z duchem konwergencji, protokół miał być dostosowany do przenoszenia zarówno danych, jak i głosu, co odróżniało go od 802.11. To drugie zostało osiągnięte przez zaczerpnięcie technologii ze standardu telefonii bezprzewodowej DECT. Z połączenia DECT i 802.11 powstaje hybryda CSMA/CA (dane) + TDMA (dźwięk) dobra dla małych domowych sieci. W ramach sieci możemy mieć cztery telefony i 127 urządzeń do transmisji danych. W podstawowej konfiguracji mamy punkt łączący z siecią PSTN, służący za coś w rodzaju stacji bazowej dla telefonów w obrębie sieci. W przypadku braku telefonów można zrezygnować z punktu centralnego. Prędkość efektywnie wynosząca 600 kbps nie wydaje się duża w stosunku do konkurencji 802.11b czy 802.11a, ale jak na warunki domowe jest odpowiednia; dużym atutem jest też cena. Proponowana następna wersja standardu, dzięki użyciu również kanałów o szerokości 3 i 5 MHz wraz z dotychczasowym o szerokości 1 MHz, ma zwiększyć prędkość do 10 Mbps. 802.11 DSSS używa całego pasma 2,4 GHz, traktując inne transmisje jako szum. Jednym z plusów modulacji szerokopasmowej z rozpraszaniem widma jest możliwość niwelowania zakłóceń wąskopasmowych. Poszerzony kanał transmisji HomeRF będzie widział 802.11 DSSS jako źródło szumu o pięciokrotnie wyższym natężeniu. HomeRF ma również przewagę nad 802.11 ze względu na mnogość implementacji.
Global Positioning System
GPS-NAVSTAR (ang. Global Positioning System - NAVigation Signal Timing And Ranging) - system nawigacji satelitarnej obejmujący całą kulę ziemską.
Działanie polega na pomiarze czasu dotarcia sygnału radiowego z satelitów do odbiornika. Znając prędkość fali elektromagnetycznej oraz znając dokładny czas wysłania danego sygnału można obliczyć odległość odbiornika od satelitów. Sygnał GPS zawiera w sobie informację o układzie satelitów na niebie (tzw. almanach) oraz informację o ich teoretycznej drodze oraz odchyleń od niej (tzw. efemeryda). Odbiornik GPS w pierwszej fazie aktualizuje te informacje w swojej pamięci oraz wykorzystuje w dalszej części do ustalenia swojej odległości od poszczególnych widzianych satelitów. Wykorzystując trilaterację mikroprocesor odbiornika może obliczyć pozycję geograficzną (długość, szerokość geograficzną oraz wysokość elipsoidalną) i następnie podać ją w wybranym układzie odniesienia - standardowo jest to WGS-84, a także aktualny czas GPS z bardzo dużą dokładnością.
System satelitów
Konfiguracja satelitów operacyjnych GPS.
System pracuje na obszarze całej Ziemi, bo w każdym punkcie globu widoczne są zawsze przynajmniej cztery satelity. Co najmniej 24 satelity (liczba wymagana do osiągnięcia pełnej operacyjności systemu, tzn. prawdopodobieństwo widoczności przynajmniej 5 satelitów w dowolnym punkcie na kuli ziemskiej, z wyłączeniem okolic biegunów, wynosi 99.96%) krążą po orbitach na wysokości około 20183 km.
Zasada działania
Sygnał dociera do użytkownika na dwóch częstotliwościach nośnych f1 = 1575,42 MHz i f2 = 1227,6 MHz. Porównanie różnicy faz obu sygnałów pozwala na dokładne wyznaczenie czasu propagacji, który ulega nieznacznym wahaniom w wyniku zmiennego wpływu jonosfery. Użytkownicy cywilni przybliżoną poprawkę jonosferyczną otrzymują w depeszy nawigacyjnej lub dzięki systemowi DGPS.
Identyfikacja satelitów oparta jest na metodzie podziału kodu CDMA (Code Division Multiple Access) oznacza to, że wszystkie satelity emitują na tych samych częstotliwościach, ale sygnały są modulowane różnymi kodami.
Odbiór sygnału bez zastosowania anten parabolicznych, które w tym przypadku są bezużyteczne ze względu na ich kierunkowość, wymaga zaawansowanych technik oddzielania sygnału od szumu i przetwarzania sygnału. Satelity są w ciągłym ruchu; wyznaczenie pozycji odbiornika na podstawie pomiaru tzw. pseudoodległości od kilku satelitów jest również złożonym zadaniem, wymagającym m.in. uwzględnienia spowolnienia upływu czasu w polu grawitacyjnym Ziemi.
Satelita GPS.
Dla poprawnej pracy systemu kluczowy jest czas. Każdy satelita jest wyposażony w zegar atomowy, dzięki czemu jego sygnał jest dokładnie zsynchronizowany z całym systemem. Jednocześnie satelity tworzą razem z kilkoma nadajnikami naziemnymi swoistą sieć korekcji czasu. W efekcie odbiornik GPS podaje nie tylko pozycje, ale również bardzo precyzyjny czas.
Aby określić pozycję w trójwymiarowej przestrzeni i czas systemu konieczny jest jednoczesny odbiór z przynajmniej czterech satelitów.
Odbiornik oblicza trzy pseudodległości do satelitów oraz odchyłki czasu (różnicy między tanim i niedostatecznie dokładnym wzorcem kwarcowym zainstalowanym na odbiorniku i precyzyjnym zegarem atomowym na satelicie). Dokładne współrzędne satelity są transmitowane w depeszy nawigacyjnej. W przypadku możliwości odbioru tylko z trzech satelitów niektóre odbiorniki mogą pracować w trybie 2D z ustawioną przez użytkownika wysokością elipsoidalną.
GLONASS
GLONASS ( Globalnaja Nawigacionnaja Sputnikowaja Sistiema) — radziecki, obecnie rosyjski, satelitarny system nawigacyjny obejmujący swoim zasięgiem niemal całą kulę ziemską. Podobnie jak GPS jest systemem stadiometrycznym, czyli pozycja jest wyznaczana w punkcie przecięcia czterech sfer o promieniach obliczonych na podstawie czasu propagacji sygnału i środkach znanych z depesz nawigacyjnych wysyłanych przez satelity.
Charakterystyka sygnału:
* każdy satelita GLONASS transmituje sygnał na innej częstotliwości,
* częstotliwości L1 wynikają z następującej zależności fL1 = 1,602 GHz + k * 0,5625 MHz (dla k=1,2,...,12 - w latach 1998-2005, oraz k=(-7...+6) dla satelitów wystrzelonych po 2005 roku),
* częstotliwości L1 i L2 są związane zależnością fL1 / fL2 = 9 / 7 (przez pomiar na dwóch częstotliwościach usuwa się refrakcję jonosferyczną),
* wszystkie satelity GLONASS transmitują taki sam kod (satelity GPS różne kody). Kod P - ma długi okres = ok. 30 tygodni, stąd też centrala dzieli go na 30 odcinków,
* każdy satelita GLONASS nadaje swoją precyzyjną pozycję na pełne pół godziny,
* sygnały (czasu) są odniesione do systemu czasu UTCSU (uniwersalny czas koordynowany byłego Związku Radzieckiego),
* współrzędne satelity podawane są w układzie odniesienia PZ-90.02 (Parametry Ziemli 1990.02), który jest zgodny z międzynarodowym układem ITRF 2000, oprócz przesunięcia początku układu o ok. 0,5 m
* GLONASS rozpoczął pracę 12 października 1982 roku, a pełną gotowość osiągnął 1 stycznia 1996 roku, do 2010 planowane jest pełne obsadzenie wszystkimi satelitami,
* format sygnału "INFO GLONASS Superframe": (główna tablica) 150 sekundowa składa się z 5 tablic 30 sekundowych. Jedna tablica 30 sekundowa rozkłada się na 15 linii subframes 2 sekundowych. Tablica taka zawiera:
o współrzędne i-tego satelity,
o składowe prędkości i-tego satelity ,
o składowe przyśpieszenia perturbującego wywołanego niecentralnym polem grawitacyjnym Ziemi i wpływem Księżyca,
o poprawkę zegara i-tego satelity do czasu Glonass,
o kalendarz (dzień), nr identyfikacyjny satelity, (zawartość informacji nawigacyjnych: współrzędne i-tego satelity, składowe prędkości i-tego satelity).
* system nie stosuje żadnych zakłóceń (satelity GLONASS nie są degradowane jak i satelity GPS)
Galileo
Galileo - europejski system nawigacji satelitarnej. Aktualnie jest w trakcie budowy, która planowo ma potrwać do 2012 roku. Ma być równoważną alternatywą do amerykańskiego systemu GPS i rosyjskiego GLONASS, lecz w przeciwieństwie do nich będzie kontrolowany przez instytucje cywilne.
9. Przedstawić przykład komputerowego systemu pomiarowego
???
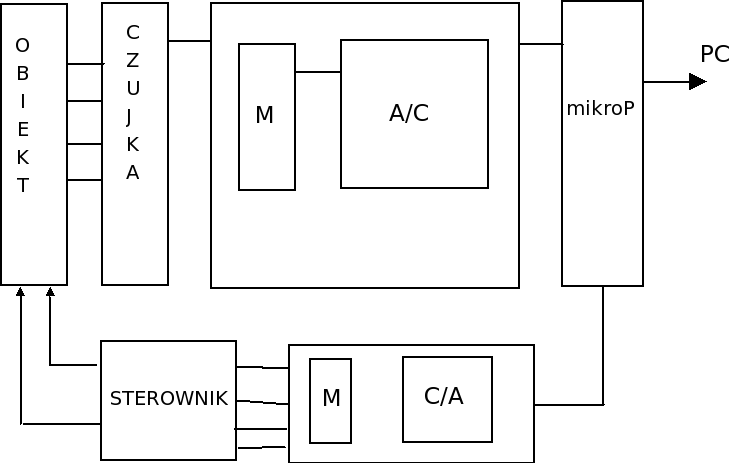
M - multiplekser;
A/C - przetwornik analogowo - cyfrowy;
C/A - przetwornik cyfrowo - analogowy;
mikroP - mikroprocesor.
???
Wyszukiwarka