STATYKA
Model ciał rzeczywistych
- punkt materialny - punkt geometryczny z przypisaną mu skończona ilością materii
- ciało sztywne - ciało stałe, którego punkty nie zmieniają wzajemnej odległości
Model oddziaływań
- siła - wektor o zadanym punkcie położenia, linii działania i kierunku działania
Prawa Newtona
Punkt materialny, na który nie działa żadna siła pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
Przyśpieszenie punktu materialnego jest proporcjonalne do siły działającej na ten punkt i ma kierunek tej siły.
Siły wzajemnego oddziaływania dwóch punktów są równe co do wartości, leżą na jednej prostej łączącej oba punkty, lecz są przeciwnie skierowane.
Jednostki masy i siły
Jednostki podstawowe:
- długość [m]
- czas [s]
- masa [kg]
Siła ciężkości - wektor ![]()
opisujący siłę przyciągania ciała do Ziemi
Ciężar ciała - ![]()
- wartość liczbowa siły ciężkości
1kg - siła z jaką Ziemia przyciąga 1kg z przyśpieszeniem ![]()
(swoją drogą głupszej definicji nie widziałem, to coś w stylu 1 metr to 1metr :P)
Zasady statyki
Zasada równoległoboku (obliczanie wypadkowej dwóch sił)
Dwie siły przyłożone do jednego punktu można zastąpić siłą wypadkową przyłożoną w tym samym punkcie, będącą przekątną równoległoboku zbudowanego na wektorach zadanych sił.
Dwie siły przyłożone do ciała sztywnego są w równowadze, gdy działają wzdłuż jednej prostej, są równe co do wartości i są przeciwnie skierowane.
Działanie układu sił przyłożonych do ciała nie ulegnie zmianie, jeśli do ciała przyłożymy lub odejmiemy dowolny układ równoważących się sił (tzw. układ zerowy).
Zasada zesztywnienia
Równowaga sił działających na ciało nie zostanie naruszona przez zesztywnienie tego ciała.
Zasada działania i przeciwdziałania
Każdemu działaniu towarzyszy równe co do wartości i przeciwnie skierowane wzdłuż tej samej prostej przeciwdziałanie.
Więzy - ograniczenia ruchu
Reakcje - oddziaływania więzów
Zasada oswobodzenia z więzów
Każde ciało w więzami można zastąpić ciałem swobodnym podlegającym siłą czynnym (aktywnym) i siłą reakcji więzów.
Rodzaje sił
zewnętrzne wewnętrzne
(działające wewnątrz ciała)
aktywne reakcji
(zadane) (oddziaływania więzów)
Więzy i ich reakcje
![]()
- reakcja
![]()
- składowa normalna reakcji
![]()
- składowa styczna reakcji (siła tarcia)
przegub walcowy 2. przegub kulisty
podpora przegubowa stała i przesówna 4. utwierdzenie (zamurowanie)
cięgno
Równania sił i momentów
Para sił i moment pary sił
Para sił - dwie siły ![]()
i ![]()
równoległe, przeciwnie skierowane, równe co do wartości i nie leżące na jednej prostej.
Ramię pary sił - jest to odległość między liniami działania sił tworzących parę sił
Moment sił (M) - wektor zaczepiony w polowie odcinka łączącego punkty zaczepienia sił i długości równej iloczynowi wartości jednej z tych sił i ramienia pary sił. Wektor ten jest prostopadły do płaszczyzny![]()
na której leżą linie działania sił. Jego zwrot określa kierunek w którym obserwator patrzący na tę płaszczyznę widzi obrót spowodowany parą sił zgodny z obrotem wskazówek zegara.
(pitu pitu - chodzi o regułę śruby prawoskrętnej)
Moment siły względem punktu
Ramię siły P względem dowolnie wybranego punktu O,
to odległość h linii działania siły P od punktu O
Moment sił ![]()
względem punktu O (MO) - wektor zaczepiony w punkcie O, o długości równej iloczynowi wartości ![]()
i jej ramienia względem punktu O. Wektor jest prostopadły do płaszczyzny, na której leży linia działania siły ![]()
i punkt O. Jego zwrot określa reguła śruby prawoskrętnej.
Moment siły względem punktu jako iloczyn wektorowy
![]()
Redukcja dowolnego układu przestrzennego sił do siły i pary sił
Załóżmy, że siła ![]()
działa na ciało w punkcie A wzdłuż prostej l.
Co zrobić, żeby przesunąć równolegle siłę ![]()
do dowolnego punktu O, aby jej działanie na ciało nie uległo zmianie?
Należy w punkcie A dołożyć dodatkowy moment tej siły względem punktu O skierowany przeciwnie, wtedy wypadkowy moment sił będzie równy zero, a zatem
przemieszczenie siły nie spowoduje zmian w działaniu siły na ciało.
Każdą siłę działającą na ciało sztywne, można sprowadzić do dowolnie wybranego punktu O przykładając w tym punkcie dodatkowo moment tej siły względem punktu O.
Układy sił na płaszczyźnie i w przestrzeni
Równania równowagi dla sił zbieżnych leżących na jednej płaszczyźnie
Siły przyłożone w jednym punkcie - nie ma momentów tylko równania równowagi sił w x i y
![]()
![]()
Równania równowagi dla sił zbieżnych w przestrzeni
Siły przyłożone w jednym punkcie - nie ma momentów tylko równania równowagi sił w x, y i z
![]()
![]()
![]()
Układy sił równoległych
Równania równowagi dla płaskiego układu sił równoległych
Wszystkie siły działają równolegle do siebie, dlatego rozważamy tylko równanie dla jednego kierunku sił i jeden moment dla wybranego punktu, lub dwa momenty.
![]()
![]()
lub ![]()
![]()
Równania równowagi dla przestrzennego układu sił równoległych
W odróżnieniu do układu płaskiego musimy rozważyć dwa momenty i równanie dla jednego kierunku sił, ponieważ siła działająca w kierunku Z może zarówno obracać element wokół osi np. X, jak i Y.
![]()
![]()
![]()
Dowolny układ sił na płaszczyźnie
a.) ![]()
![]()
![]()
b.) ![]()
![]()
![]()
c.) ![]()
![]()
![]()
Tarcie i praca tarcia
Istnieje pewna graniczna wartość siły ![]()
, które niejako określa jak długo element pozostaje w spoczynku, tzn. dopóki działająca na element siła jest mniejsza od ![]()
element się nie przesuwa, a tarcie jakie ma miejsce nazywa się tarciem statyczny. Gdy natomiast siła działająca jest większa od ![]()
to ciało się ślizga po powierzchni i mówimy, że jest to tarcie kinetyczne.
Siła tarcia:
dla ciała w spoczynku: ![]()
, gdzie ![]()
- współczynnik tarcia statycznego,
![]()
- siła nacisku
dla ciała ślizgającego się: ![]()
, gdzie ![]()
- współczynnik tarcia
kinetycznego
Prawa Coulomba i Morena
Siła tarcia T nie zależy od wielkości stykających się ze sobą powierzchni
Dla ciała pozostającego w spoczynku wartość siły tarcia posiada wartość od 0 do

(gdzie
) proporcjonalnej do wartości nacisku normalnego
.Gdy ciało się ślizga po powierzchni, siła tarcia jest przeciwnie skierowana do kierunku ruchu.
8.1 Kąt tarcia i stożek tarcia
![]()
- kąt, który tworzy reakcja ![]()
z normalną do powierzchni styku.
![]()
- „kąt tarcia” - maksymalny kąt o który może się odchylić reakcja ![]()
od normalnej powierzchni styku.
Ciało pozostaje w spoczynku, gdy

Siła

może być zrównoważona przez
, gdy pozostaje w „stożku tarcia” o kacie przy wierzchołku.
8.2 Tarcie cięgien
Przyjmijmy sytuacje jak na rysunku, gdzie cięgno obracające szorstki bęben naciągnie jest różnymi siłami ![]()
i ![]()
![]()
. Siła ![]()
osiągnęła wartość maksymalną, przy której jest jeszcze możliwa równowaga. Jeśli będziemy dalej zwiększać wartość ![]()
spowoduje to poślizg w kierunku ![]()
.
Zależność miedzy ![]()
i ![]()
jest wyrażona następującym wzorem: ![]()
gdzie: ![]()
- jest to kąt opasania, ![]()
- współczynnik tarcia
8.3 Tarcie toczne
W wyniku tarcia tocznego następuje przesunięcie siły nacisku. Zależność tą opisuje współczynnik przesunięcia siły nacisku: f.
9. Środek ciężkości i moment statyczny
Siła ciężkości - objętościowe siły równoległe działające na dowolnie małe otoczenie każdej cząstki
Wypadkowa siła ciężkości - wektor główny ![]()
wszystkich sił ciężkości względem każdego punktu O, dla którego moment główny ![]()
znika.
Definicja środka ciężkości - środkiem ciężkości nazywamy punkt C, przez który przechodzi wypadkowa siła ciężkości ![]()
przy dowolnym położeniu ciała.
Środek ciężkości figury płaskiej:


![]()
gdzie: ![]()
- moment statyczne względem osi Y
![]()
- moment statyczny względem osi X
KINEMATYKA
Kinematyka polega na badaniu ruchu ciał bez uwzględnienia sił, które je powodują.
Ruch - zmiana położenia jednego ciała względem drugiego, przy czym jedno przyjmujemy jako nieruchome.
Przestrzeń euklidesowa - przestrzeń, w której można wprowadzić kartezjański układ współrzędnych. Położenia każdego punktu jest opisane przez trzy jego współrzędne.
Układ odniesienia - układ kartezjański sztywno związany z ciałem odniesienia
Czas absolutny - czas niezależny od wyboru układu odniesienia
1. Równania ruchu we współrzędnych prostokątnych
{O,x,y,z} - nieruchomy układ współrzędnych kartezjańskich, zaczepiony w punkcie O.
Ruch punktu A opisują 3 funkcje jednej zmiennej:

![]()
- aktualne współrzędne punktu A
![]()
- zmienna niezależna - czas
Tor punktu - linia, po której porusza się punkt A opisana 3 równaniami ruchu
Promień-wektor punktu A - wektor ![]()
jest funkcją wektorową czasu ![]()
, składowe tego wektora to aktualne współrzędne punktu A ![]()
Jeżeli {i,j,k} to wersory osi {x,y,z} to: ![]()
2. Równania ruchu punktu we współrzędnych krzywoliniowych
a.) współrzędne biegunowe na płaszczyźnie

gdzie: ![]()
b.) współrzędne walcowe

gdzie: 
c.) współrzędne biegunowe w przestrzeni (sferyczne)

gdzie: 
3. Prędkość punktu w ruchu krzywoliniowym
s - współrzędna łukowa (długość łuku w funkcji t: ![]()
)
Wektor prędkości w punkcie A leży na stycznej do toru w tym punkcie i skierowany jest zgodnie z kierunkiem ruchu tego punktu, a jego wartość wynosi:
![]()
4. Prędkość punktu jako pochodna promienia wektora
![]()
- przyrost promienia-wektora w przedziale czasu ![]()
![]()
Stosunek przyrost promienia-wektora do przyrostu czasu jest równy prędkości punktu poruszającego się ruchem jednostajnym prostoliniowym, zatem jest to prędkość średnia ![]()
.
Jeśli teraz ![]()
, to otrzymujemy: ![]()
Jak również przy ![]()
, gdzie ![]()
jest długością łuku ![]()
, z czego wynika, że: 
5. Przyśpieszenie punktu
hodograf - krzywa zakreślana przez koniec wektora zależnego od czasu, przy czym początek wektora znajduje się zawsze w tym samym punkcie.
![]()
- hodograf prędkości punktu A - linia utworzona przez końce wektorów-prędkości
punktu A o wspólnym początku O
Przyśpieszenie średnie punktu A w czasie ![]()
![]()
Przyśpieszenie punktu A
![]()
Wektor ![]()
jest styczny do hodografu w punkcie, który jest końcem wektora prędkości ![]()
i skierowany jest zgodnie z kierunkiem powstawania hodografu.
Składowe wektora ![]()
w nieruchomym układzie {x,y,z}
Równania ruchu: ![]()
; ![]()
; ![]()
zatem:
![]()
, ![]()
, ![]()
![]()
6. Przyśpieszenie styczne i dośrodkowe
Krzywa i promień krzywizny linii płaskiej
Krzywizną k krzywej l w punkcie A - nazywamy wielkość: ![]()
Promieniem krzywizny (![]()
) krzywej l w punkcie A - nazywamy odwrotność jej krzywizny: ![]()
Środkiem krzywizny (O) linii l w punkcie A nazywamy punkt, który jest granicą punktów przecięcia (O') normalnej do krzywej l w punkcie A z normalną do krzywej l w punkcie A'.
Krzywizna i promień krzywizny krzywej przestrzennej
Płaszczyzna styczna - każda płaszczyzna przechodząca przez styczną w punkcie A
(nie ma na rysunku)
Płaszczyzna ściśle styczna - jest to płaszczyzna, do której dąży płaszczyzna
styczna w punkcie ![]()
, równoległa do stycznej w
punkcie ![]()
, gdy ![]()
Płaszczyzna normalna - zawiera wszystkie proste normalne do linii w punkcie ![]()
Płaszczyzna prostująca - płaszczyzna prostopadła do płaszczyzny ściśle
stycznej i płaszczyzny normalnej
Normalna główna - przecięcie płaszczyzny normalnej z płaszczyzną ściśle
styczną
Binormalna - Przecięcie płaszczyzny normalnej z płaszczyzną prostującą
Styczna, normalna główna i binormalna są do siebie prostopadłe w punkcie A - tworzą naturalny układ współrzędnych {n,t,b}.
Rozkład wektora przyśpieszenia ![]()
na składową styczną i normalną do toru l punktu A
a.) tor jest krzywą płaską
rozpisujemy tak:
Ponieważ: ![]()
to najpierw szukamy wektora![]()
, który rozpisujemy na sumę wektorów:
![]()
gdzie: ![]()
- składowa styczna;
![]()
- składowa styczna
Czyli przyśpieszenie będzie sumą przyśpieszeń: ![]()
Stąd: ![]()
- przyśpieszenie styczne

- przyspieszenie normalne
zatem: ![]()
, gdzie: ![]()
oraz ![]()
b.) tor jest krzywą przestrzenną
Wektor przyśpieszenia ![]()
leży w płaszczyźnie ściśle stycznej określonej przez proste styczne toru określonej przez styczne w punktach![]()
i ![]()
, gdy ![]()
7. Składowe prędkości i przyśpieszenia punktu w biegunowym układzie
współrzędnych
a.) tor punktu A w biegunowym układzie współrzędnych
![]()
- promień-wektor punktu a
![]()
,![]()
- wersory lokalnego układu współrzędnych
![]()
gdzie: ![]()
b.) prędkość punktu A
![]()
gdzie: ![]()
oraz ![]()
c.) przyśpieszenie punktu A
![]()
gdzie: ![]()
oraz ![]()
7. Ruch ciała sztywnego
Ciało sztywne - ciało stałe, którego punkty nie zmieniają wzajemnych odległości
Położenia ciała sztywnego - określone przez położenie 3 jego punktów nie leżących w
jednej prostej.

9 współrzędnych
minus 3 zależności:
Razem ciało sztywne posiada 6 stopni swobody.
Liczba stopni swobody - liczba parametrów potrzebnych do określenia chwilowego położenia w przestrzeni
7.1 Ruch postępowy ciała sztywnego
Ruch postępowy (przesunięcie względne, translacja) - podczas ruchu dowolna prosta należąca do ciała pozostaje równoległa do swojego położenia chwili początkowej
![]()
w czasie ![]()
prędkość ruchu postępowego: ![]()
przyśpieszenie ruchu postępowego: ![]()
Ruch postępowy dzielimy na:
- prostoliniowy
- krzywoliniowy
7.2 Ruch obrotowy ciała sztywnego
Ruch obrotowy - podczas ruchu jedna prosta należąca do ciała (oś obrotu) pozostaje nieruchoma
Orientacja osi obrotu - jest zgodna ze zwrotem osi Z przyjętego układu współrzędnych {x,y,z}
Kąt obrotu ciała (![]()
) - mierzony jest przez obserwatora patrzącego wzdłuż osi OZ w kierunku początku układu współrzędnych, w kierunku przeciwnym do kierunku ruchu wskazówek zegara.
![]()
- mierzymy w radianach
prędkość kątowa w chwili t: ![]()
przyśpieszenie kątowe w chwili t: ![]()
Prędkość dowolnego punktu A wewnątrz ciała w ruchu obrotowym
Położenie punktu A w układzie biegunowym opisują parametry:{![]()
}, ![]()
![]()
, zatem prędkość:
![]()
występuje tylko składowa styczna wektora
rozkład prędkości w ruchu obrotowym
Przyśpieszenie dowolnego punktu A wewnątrz ciała w ruchu obrotowym
Przyśpieszenie rozkładamy na styczne i normalne
![]()
oraz ![]()
zależności:
![]()
![]()
![]()
![]()
- nie zależy od h
Prędkość kątowa i przyspieszenie kątowe
Wektor prędkości kątowej ![]()
- wektor leżący na osi obrotu OZ - zaczepiony w dowolnym jej punkcie (wektor ![]()
jest wektorem przesuwanym wzdłuż osi Z), o długości: ![]()
i skierowany tak, aby obserwator patrzący wzdłuż osi na koniec wektora widział jego obrót.
Związek ![]()
i ![]()
: ![]()
, ale ![]()
zatem: ![]()
Wektor przyspieszenia kątowego: ![]()
(każdą składową różniczkujemy oddzielnie)
Związek ![]()
z ![]()
: ![]()
a ponieważ ![]()
i ![]()
to:
![]()
gdzie: ![]()
- składowa styczna, ![]()
- składowa normalna
Ruch płaski ciała sztywnego
Ruch płaski - ruch w którym wszystkie punkty ciała poruszają się w płaszczyznach
równoległych do ustalonej, nieruchomej płaszczyzny kierującej.
Trzy układy współrzędnych:
- {O,x,y} - układ nieruchomy związany z płaszczyzną kierującą
- {A,x',y'} - układ ruchomy związany z ciałem o początku w
dowolnie wybranym punkcie A i osiach
równoległych do x i y
- {A,![]()
,![]()
} - układ ruchomy związany z ciałem o początku w
punkcie A i obrócony względem osi x o kąt ![]()
Chwilowe położenie figury płaskiej:

Równanie ruchu:
- kąt obrotu figury płaskiej
Ruch {A,x',y'} jest ruchem postępowym względem {O,x,y}
Ruch {A,![]()
,![]()
} jest ruchem obrotowym względem {A,x',y'}
1. Ruch płaski jako złożenie ruchu postępowego i obrotowego
wyjaśnienie na przykladzie
![]()
- promienie wektory punktów A i B w chwili t
![]()
- przyrosty po czasie ![]()
I teraz tak: ![]()
gdzie: ![]()
- obrót o ![]()
wokół ![]()
Ale ![]()
, gdzie ![]()
- wektor prędkości obrotowej wokół punktu A
Zatem: ![]()
Zamiana wektora prędkości
![]()
, ![]()
,![]()
zatem: ![]()
ale: ![]()
stąd: ![]()
![]()
- biegun (dowolnie wybrany punkt figury płaskiej)
![]()
- prędkość punktu B w ruchu obrotowym względem bieguna A
Prędkość dowolnego punktu B figury płaskiej poruszającej się w swojej płaszczyźnie jest sumą prędkości dowolnie obranego punktu A (bieguna) oraz prędkości punktu B w ruchu obrotowym wokół bieguna.
Prędkość kątowa w ruchu obrotowym nie zależy od wyboru bieguna.
Dla punktów B leżących na prostej prostopadłej do wektorów ![]()
, wektory ![]()
i ![]()
są równoległe.
2. Ruch płaski jako chwilowy ruch obrotowy
![]()
- dowolnie wybrany biegun
![]()
- prędkość liniowa bieguna ![]()
n - prosta prostopadła do ![]()
przechodząca przez biegun
![]()
- prędkość wokół bieguna ![]()
![]()
- prędkość ![]()
względem ![]()
(skierowana przeciwnie do ![]()
)
![]()
- wyznaczamy - prędkość pkt. B
Ponieważ ![]()
, a ![]()
to: ![]()
Jeśli zatem ![]()
to na prostej n istnieje taki punkt C, w którym prędkość ![]()
, bo:
![]()
Taki punkt C jest to chwilowy środek obrotu. Prędkość ![]()
dowolnego punktu ![]()
względem chwilowego środka obrotu wynosi: ![]()
Ruch płaski ciała sztywnego może być traktowany jako chwilowy ruch obrotowy wokół środka chwilowego obrotu.
3. Przyspieszenie w ruchu płaskim
![]()
![]()
![]()
Jeśli ![]()
to: ![]()
zatem: ![]()
gdzie:
![]()
- przyspieszenie styczne punktu
![]()
- przyspieszenie normalne punktu
![]()
Ruch względny
1. Ruch bezwzględny i względny
{O,x,y,z} - układ nieruchomy
{O',x',y',z'} - układ ruchom względem układu nieruchomego
Ruch bezwzględny - ruch ciała względem układu nieruchomego
Ruch względny - ruch ciała względem układu ruchomego
2. Prędkość względna i bezwzględna
![]()
- prędkość względna
![]()
- prędkość unoszenia
![]()
- prędkość bezwzględna
![]()
zatem: ![]()
a ponieważ ![]()
to:
![]()
3. Pochodna lokalna (względna) i pochodna bezwzględna
Prędkość unoszenia: ![]()
![]()
- prędkość początku układu ruchomego
![]()
- prędkość kątowa tego układu wokół zadanej osi obrotu
![]()
- promień-wektor punktu A w ruchomym układzie współrzędnych
zatem: ![]()
![]()
, gdzie ![]()
- pochodna lokalna w układzie ruchomym
![]()
- pochodna ![]()
w układzie nieruchomym
![]()
- pochodna bezwzględna w układzie nieruchomym
![]()
zachodzi nierówność, ponieważ w układzie ruchomym dochodzi jeszcze jedna składowa związana z obrotem wektora
Związek pomiędzy pochodną lokalną i pochodną bezwzględną
![]()
- w układzie ruchomym
![]()
- w układzie nieruchomym
dopiero teraz zajdzie równość:
![]()
4. Składowe przyśpieszenia punktu
(przyśpieszenie Coriolisa)
Przyśpieszenie bezwzględne punktu A w układzie nieruchomym: ![]()
Przyśpieszenie względne punktu A w układzie ruchomym: ![]()
![]()
zatem aby policzyć różniczkujemy:
![]()
![]()
, ![]()
, a ![]()
i ![]()
liczymy z pochodnych lokalnych
![]()
![]()
no to podstawiamy: ![]()
![]()
- przyśpieszenie bezwzględne
![]()
- przyśpieszenie unoszenia
![]()
- przyśpieszenie wzgledne
![]()
- przyśpieszenie Coriolisa
zatem: ![]()
Ruch kulisty
Ruch kulisty jest to ruch ciała sztywnego, którego jeden punkt (środek ruchu kulistego) jest nieruchomy
- torami punktów ciał B są krzywe leżące na sferach o środku O
- ciało ma 3 stopnie swobody
Ruchomy układ współrzędnych {![]()
} związany z nieruchomym układem współrzędnych {v,x,y,z}
Kąty Eulera:
Obrót wokół osi Z o kąt ![]()
- kąt precesji
- oś X przechodzi na prostą ON - linia węzłów
Obrót wokół linii węzłów ON o kąt ![]()
- kąt nutacji - oś Z przechodzi na oś ![]()
Obrót wokół osi ![]()
o kąt ![]()
- kąt obrotu własnego - linia węzłów ON przechodzi na oś ![]()
, z oś Y na oś ![]()
3 kąty Eulera:
![]()
- kąt precesji
![]()
- kąt nutacji
![]()
- kąt obrotu własnego
Jednoznacznie określają położenie ciała w ruchu kulistym.
Małe obroty ciała sztywnego ![]()
,![]()
,![]()
wokół: Z,ON, ![]()
(wektory: ![]()
) zastępujemy jednym obrotem.
Wektor wypadkowy małego obrotu w czasie ![]()
: ![]()
Chwilowa prędkość kątowa ![]()
Gdzie: ![]()
- prędkość kątowa obrotu własnego
![]()
- prędkość kątowa precesji
![]()
- prędkość kątowa nutacji
![]()
Składowe wektora ![]()
w układzie nieruchomym {x,y,z}
(składowe ![]()
)
Składowe prędkości liniowej ![]()
w ruchu kulistym
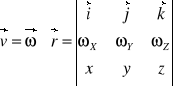
gdzie: (![]()
) - wersory układu {x,y,z}
zatem: 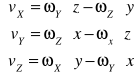
Precesja regularna (szczególny przypadek ruchu kulistego)
Założenia: ![]()
- prędkość kątowa
obrotu własnego jest stała
![]()
- prędkość kątowa
precesji jest stała
![]()
- kąt mutacji jest
stały ![]()
A ponieważ: ![]()
Zatem wartość bezwzględna precesji kątowej wynosi: ![]()
Precesja prosta Precesja odwrotna
Przyśpieszenie w ruchu kulistym
- prędkość w ruchu kulistym: ![]()
- przyspieszenie: ![]()
![]()
- przyspieszenie dośrodkowe punktu A
![]()
- przyspieszenie poosiowe punktu A
zatem: ![]()
![]()
i ![]()
mogę mieć dowolne i różniące się między sobą kierunki
Przyspieszenie kątowe ciała podczas precesji regularnej
![]()
- prędkość wektora punktu O
![]()
- przyspieszenie z jakim porusza się koniec wektora ![]()
po hodografie
![]()
zatem: ![]()
wartość bezwzględna ![]()
:
![]()


![]()
Wyszukiwarka