042 043
42 Anna Borowska. Rafał Chaba
Ql=hffh (2.44)
Ponieważ zależność (2.44) jest nieliniowa, zatem nieliniowe jest też równanie (2.42)
Po linearyzacji otrzymamy:
|
A~ = AQ,-AQ2 dt |
(2.45) |
|
AQ\ = vA/j |
(2.46) |
|
(2.47) | |
|
^Qi V2# fy) 4/i + fio 2^2gh ^ |
(2.48) |
|
AQi - k\Af2 + k2Af{ |
(2.49) |
gdzie:
*1 = V2^0 ~ flO ~
Podstawiamy zależności (2.46) i (2.49) do zależności (2.45) otrzymujemy:
A
dAh
dt
- vAf) - Aj A/2 - k2Ah
(2.50)
Ostatecznie równanie ruchu obiektu przyjmuje postać:
(2.51)
T^L + Ah = k2Afl-kĄAf2
gdzie:

Al
k2
Zmianę przekroju zaworów określamy równaniami:
A/, - -mfy
Afi - -7idx
Równanie ruchu zespołu rozdzielacz - siłownik hydrauliczny
7j — = AA - £
1 dt
Równanie równowagi przesunięć dla dźwigni
£ - Z
a b
U.02)
(2.53
(2.54)
(2.55)
Przekształcając powyższe związki możemy wyznaczyć równanie ruchu układu w' następującej postaci:
AA =
(2.56)
Wykorzystując zasady budowania schematu blokowego układu automatyki, schemat układu można przedstawić jak na rys. 2.7
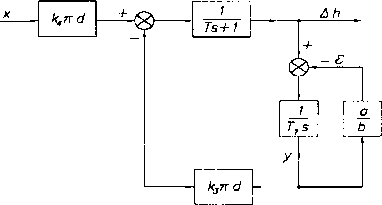
Rys. 2. 7. Schemat układu z rys. 2.6
Wyszukiwarka
Podobne podstrony:
042 043 42 Anna Borowska. Rafał Chaba Ql=hf^ (2-44) Ponieważ zależność (2.44) jest
034 035 34 Anna Borowska, Rafał Chaba Wykonując transformatę Lapiace a i eliminując prąd otrzymamy 1
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h{t) = k{t - r0) (2.40) Odpowiedź
044 045 44 Anna Borowska, Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
046 047 46 Anna Borowska. Rafał Chaba gdzie: fi = arctg Po wstawieniu wartości T i C, otrzymamy: Ah(
044 045 44 Anna Borowska. Rafał Chaba Na podstawie tego schematu wyznaczamy transmitancję układu w p
046 047 46 Anna Borowska. Rafał Chaba gdzie: 1 = arctg Po wstawieniu wartości T i C, otrzymamy: Ah(t
036 037 36 Anna Borowska, Rafał Chaba 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba 2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rz
040 041 40 Anna Borowska. Rafał Chaba Odpowiedź jednostkowa: h(ł) = k(ł-T0)
042 043 2 42 U Programowanie liniowe 42 U Programowanie liniowe Tablica
036 037 36 Anna Borowska, Rafał Chata 2.2.4. Człon różniczkujący W członie różniczkującym idealnym s
038 039 38 Anna Borowska. Rafał Chaba2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rzę
032 033 32 Anna Morawska. Rafał Chaba natomiast odpowiedź jednostkowa wynosi (2.3) h(s) = -sMO = Prz
więcej podobnych podstron