066 067 2
66
Programowanie liniowe
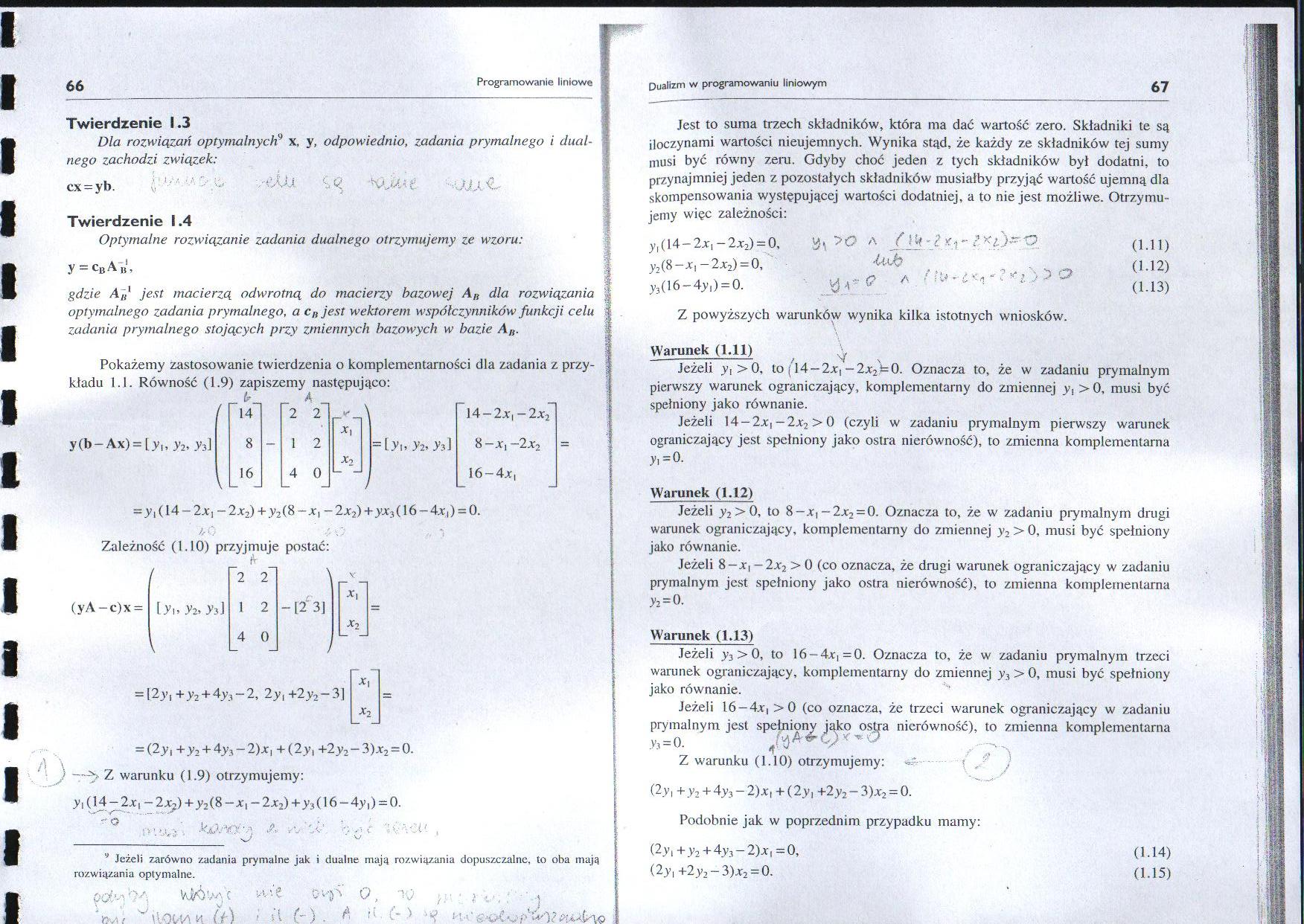
Twierdzenie 1.3
Dla rozwiązań optymalnych9 x, y, odpowiednio, zadania prymalnego i dual- :
nego zachodzi związek: cx=yb.
otu śk
Twierdzenie 1.4
Optymalne rozwiązanie zadania dualnego otrzymujemy ze wzoru:
y = cB A h , |
gdzie A,,' jest macierzą odwrotną do macierzy bazowej An dla rozwiązania optymalnego zadania prymalnego, a cn jest wektorem współczynników funkcji celu | zadania prymalnego stojących przy zmiennych bazowych w bazie A„.
Pokażemy zastosowanie twierdzenia o komplementarności dla zadania z przykładu 1.1. Równość (1.9) zapiszemy następująco:
|
t |
~14~ |
~2 |
2 |
\ |
14 — 2jC| -2-t2 | ||||
|
X\ | |||||||||
|
y(b-Ax) = ly„ y2, y3] |
8 |
1 |
2 |
x2 |
= L.vi, y2, y3] |
8-x, -2x2 | |||
|
\ |
16 |
4 |
0 |
—1 |
/ |
16 — 4jc i |
= yi(14-2x, -2j:2) + y2(8-X| -2x2)+yx3(16-4.rl) = 0.
b A _
Zależność (1.10) przyjmuje postać:
fV
|
f |
2 2~ |
\ |
V | ||
|
r |
*1 | ||||
|
> 1 n X II |
[a. y2, y>} |
1 2 |
- 12 3] |
x2 | |
|
\ |
4 0 |
) |
x\
= 12yi + y2 + 4y, — 2, 2y,+2y2-3|
X2
= (2y, + y2 + 4y,-2)X| +(2.y, +2y2-3)„t2 = 0. ) —Z warunku (1.9) otrzymujemy:
>i (14 ~ 2x, — 2xf) +y2(8 — jc, — 2x2) +y3( 16 — 4y,) = 0.
9 Jeżeli zarówno zadania prymalne jak i dualne mają rozwiązania dopuszczalne, to oba mają rozwiązania optymalne.
Od'-:
1! V'!-,
Jest to suma trzech składników, która ma dać wartość zero. Składniki te są iloczynami wartości nieujemnych. Wynika stąd, że każdy ze składników tej sumy musi być równy zeru. Gdyby choć jeden z tych składników był dodatni, to przynajmniej jeden z pozostałych składników musiałby przyjąć wartość ujemną dla skompensowania występującej wartości dodatniej, a to nie jest możliwe. Otrzymujemy więc zależności:
y,(14—2*i — 2x2) = 0, >0 A - l - c O (1.11)
y2(8-x,-2x2) = 0, M (1.12)
yj(16—4y,) = 0. A ‘ (1-13)
Z powyższych warunków wynika kilka istotnych wniosków.
Warunek (1.11)
Jeżeli yi > 0, to j14 — 2x,-2*2-0. Oznacza to, że w zadaniu prymalnym pierwszy warunek ograniczający, komplementarny do zmiennej y, > 0, musi być spełniony jako równanie.
Jeżeli 14 — 2jc,-2x2 > 0 (czyli w zadaniu prymalnym pierwszy warunek ograniczający jest spełniony jako ostra nierówność), to zmienna komplementarna y,=0.
Warunek (1.12)
Jeżeli y2> 0, to 8-x,~2x2 = 0. Oznacza to, że w zadaniu prymalnym drugi warunek ograniczający, komplementarny do zmiennej y2 > 0, musi być spełniony jako równanie.
Jeżeli 8-x, -2x2 > 0 (co oznacza, że drugi warunek ograniczający w zadaniu prymalnym jest spełniony jako ostra nierówność), to zmienna komplementarna
y2=0-
Warunek (1.13)
Jeżeli >3>0, to 16-4x, = 0. Oznacza to, że w zadaniu prymalnym trzeci warunek ograniczający, komplementarny do zmiennej y3 > 0, musi być spełniony jako równanie.
Jeżeli 16 — 4x|>0 (co oznacza, że trzeci warunek ograniczający w zadaniu prymalnym jest spełniony jako ostra nierówność), to zmienna komplementarna
y3 = 0. "O
Z warunku (1.10) otrzymujemy:
(2y, + .y: + 4y3-2)X| + (2y, +2y2-3)x2 = 0.
Podobnie jak w poprzednim przypadku mamy:
(1.14)
(1.15)
(2y, + y2 + 4y,-2)x, =0,
(2>’i +2 y2 - 3)x2 = 0.
Wyszukiwarka
Podobne podstrony:
134 135 134 Programowanie liniowe calkowitoliczbowe Rozwiązanie optymalne Zadanie rozwiązujemy za po
Zagadnienie programowania liniowego □ Dla rozwiązań optymalnych wartości funkcji
024 025 2 24 Programowanie liniowe1.2.2. Zbiór rozwiązań dopuszczalnych W zadaniu rozpatrywanym w pr
Zagadnienie programowania liniowego Dla każdego programu liniowego (zwanego pierwotnym) można zapisa
066 067 66 Eliza Mytych. Ludwik KumańskiLm(co) Rys. 3.22. Charakterystyka logarytmiczna amplitudowa
066 067 66 Wskazówka! wyrazić negację, sumę i Iloczyn poprzez Implikację i 0. 2.6.
ZASTOSOWANIE PROGRAMOWANIA LINIOWO-DYNAMICZNEGO DO OPTYMALIZACJI STANÓW MAGAZYNOWYCH JOANNA
16 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
8 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
10 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów magazynowych
12 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
14 Joanna Banaś Zastosowanie programowania liniowo-dynamicznego do optymalizacji stanów
066 067 66 Wskazówka! wyrazić negację, sumę i Iloczyn poprzez Implikację i O. 2.6.
Twierdzenia programów liniowych 1) Zbiór rozwiązań dopuszczalnych MPL jest zbiorem
Podstawowe określenia i twierdzenia dotyczące programem liniowych (liczba rozwiązań ) DWIE POSTACIE
Badania operacyjr Zagadnienia programowania liniowego METODA GRAFICZNA >■ W sytuacji, gdy w zadan
Rozdział 1. Programowanie liniowe binarną są określane mianem zadania programowania binarnego. W
więcej podobnych podstron