mech2 175

343
Rozwiązanie
I
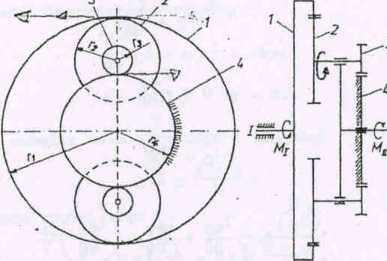
Podany układ ma 4 stopień swobody. Przyjnrujemy cp^. jako współrzędną uogólnioną kąt obrotu cp wału I., Równanie Lagrange'a ma więc następującą postać:
3
2
■3
■i
Rya. 262
Energia kinetyczna wszystkich poruszających się części reduktora
2
.2

2
przy czym U).. - prędkość kątowi, wału napędzającego,
, «
u)o “ prędkość kątowd satelity 2-3 podczas obrotu wokół własnej osi,
vc - prędkość liniowa środka ciężkości satelity 2-3, uij j - prędkość kątowa wału napędzanego.
Musimy wyznaczyć poszczególne prędkości kątowe.Zależności między względnymi prędkościami kątowymi obrotu kół a promieniami tych kół są następujące:
^ ~ ">11 _ fz
W2 " WII r1
r
•' _ t
y.nolH ''+» wynikają z przyjętej umowy, że obrót w kierunku rucPu wskazówek zegara jest ujemny. Ponadto uwzględnimy, że m g = ^, 01 4 = 0 £_koło 4
jest nieruchome). Wyznaczając z (i) u> ^ - Ujj i podstawiając do (2) otrzymamy!
II
UII
UJ 4- U)
II + I
1 +
12li ^r3
- «t lip + rs2
r1r3 + r2r4
Prędkość środka ciężkości satelity 2-3
r1r3 Cr3 + r4-)
To - H"ll - (r3 + r4) “II -*I t't3 + r2r4 •
Podstawiając wyznaczone wyrażenia do wzoru określającego energię ki^ne>'yczn^ otrzymamy:
1 -2
E - -H
' ^ 2m2-3 r1r3 Cr3 + r4>2 . 2I2-3r1 Cr3 ł r4^2
2 2 r1r3
<^1r3 + r2r4v Cr1r3 + r2r4)
(r1r3 + ^2r4)'
+ I,
13 4/
j Wyrażenie w nawiasie traktujemy jako moment bezwładności Reduktora ^ oa,mi-| czarny I
] i = i + 2l~1 + (“2-5r3 + I2-3) + III --2 '
I . . 1 Cr1r3 + r2r4) ^ ^ Clr3 + *2*0
stąd
e = 4 i?2
I *
Następnym krokiem jest wyznaczenie energii potencjalnej U.
Ze względu na to, że środek ciężkości wszystkich poruszających si«^ części reduktora znajduje się cały czas na osi pokrywającej alę z osiami wałów I i II, energia potencjalna reduktora jest stała
U = const.
Wyszukiwarka
Podobne podstrony:
mech2 154 I I I 306 Rozwiązanie 1 Jeżeli punkt A ma być środkiem chwilowego obrotu
mech2 154 I I I 306 Rozwiązanie 1 Jeżeli punkt A ma być środkiem chwilowego obrotu
oraz n(A : B) Ponieważ rz A = r/.{A : B) = 3 i mamy trzy niewiadome, więc układ ma dokładnie jedno r
s146 147 146 gdy k = 1; R(A) = R{Ab) = 2 =$> układ ma nieskończenie wiele rozwiązań z jednym para
zadanie2egzamin Rozwiązując układ meboda Cramera: Układ ma 1 rozwiązanie (jesb oznaczony), gdy:I Ukł
2Rząd macierzy, układy równań liniowych Zadanie 3 Zbadaj, ile rozwiązań posiada podany układ równań.
mech2 128 254 Rozwiązanie Za względu na to, że walec ma większy moment bezwładności niż kula, stacza
mech2 128 254 Rozwiązanie Za względu na to, że walec ma większy moment bezwładności niż kula, stacza
mech2 179 356 Rozwiązanie ogólne ma poBtać u = e-wt + —^ cos u) t. . 2ui Stałe , C
mech2 179 356 Rozwiązanie ogólne ma poBtać u = e-wt + —^ cos u) t. . 2ui Stałe , C
minileksykon111 Jeżeli w układzie równań liniowych wyznacznik
skanuj0016 (131) wania dekodera niepełnego powstaje pytanie: jak układ ma działać w przypadku, gdy n
georazbiorów 10. Rozwiązać graficznie układ nierówności y > logj x, y <
więcej podobnych podstron