M015
11.2. Zasada działania systemu dynamicznego pozycjonowania statku
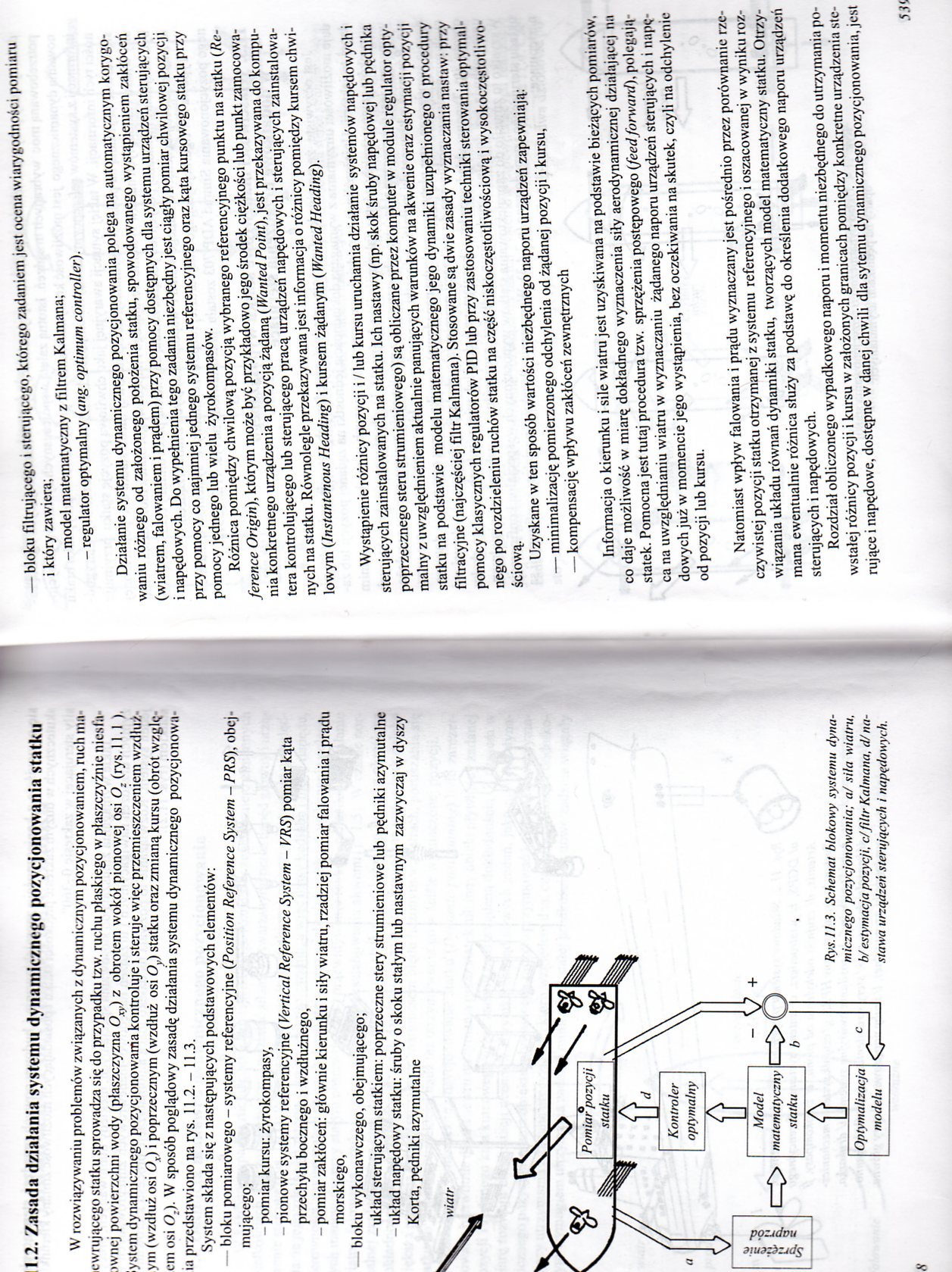
W rozwiązywaniu problemów związanych z dynamicznym pozycjonowaniem, ruch ma icwrującego statku sprowadza się do przypadku tzw. ruchu płaskiego w płaszczyźnie niosła awnej powierzchni wody (płaszczyzna Oxy) z obrotem wokół pionowej osi O, (rys. 11.1 ) iystem dynamicznego pozycjonowania kontroluje i steruje więc przemieszczeniem wzdłuż ym (wzdłuż osi Ox) i poprzecznym (wzdłuż osi Ov) statku oraz zmianą kursu (obrót w/.glę cm osi O.). W sposób poglądowy zasadę działania systemu dynamicznego pozycjonowa ia przedstawiono na rys. 11.2. - 11.3.
System składa się z następujących podstawowych elementów: bloku pomiarowego - systemy referencyjne (Position Reference System - PRS), obejmującego;
- pomiar kursu: żyrokompasy,
- pionowe systemy referencyjne (Yertical Reference System - VRS) pomiar kąta przechyłu bocznego i wzdłużnego,
- pomiar zakłóceń: głównie kierunku i siły wiatru, rzadziej pomiar falowania i prądu morskiego,
bloku wykonawczego, obejmującego;
- układ sterującym statkiem: poprzeczne stery strumieniowe lub pędniki azymutalne
- układ napędowy statku: śruby o skoku stałym lub nastawnym zazwyczaj w dyszy Korta, pędniki azymutalne


— bloku filtrującego i sterującego, którego zadaniem jest ocena wiarygodności pomiaru
i który zawiera;
- model matematyczny z filtrem Kalmana;
- regulator optymalny (ang. optimum controller).
Działanie systemu dynamicznego pozycjonowania polega na automatycznym korygowaniu różnego od założonego położenia statku, spowodowanego wystąpieniem zakłóceń (wiatrem, falowaniem i prądem) przy pomocy dostępnych dla systemu urządzeń sterujących i napędowych. Do wypełnienia tego zadania niezbędny jest ciągły pomiar chwilowej pozycji przy pomocy co najmniej jednego systemu referencyjnego oraz kąta kursowego statku przy pomocy jednego lub wielu żyrokompasów.
Różnica pomiędzy chwilową pozycją wybranego referencyjnego punktu na statku (Reference Origiri), którym może być przykładowo jego środek ciężkości lub punkt zamocowania konkretnego urządzenia a pozycją żądaną (Wanted Point), jest przekazywana do komputera kontrolującego lub sterującego pracą urządzeń napędowych i sterujących zainstalowanych na statku. Równolegle przekazywana jest informacja o różnicy pomiędzy kursem chwilowym (Instantenous Heading) i kursem żądanym (Wanted Heading).
Wystąpienie różnicy pozycji i / lub kursu uruchamia działanie systemów napędowych i sterujących zainstalowanych na statku. Ich nastawy (np. skok śruby napędowej lub pędnika poprzecznego steru strumieniowego) są obliczane przez komputer w module regulator optymalny z uwzględnieniem aktualnie panujących warunków na akwenie oraz estymacji pozycji statku na podstawie modelu matematycznego jego dynamiki uzupełnionego o procedury filtracyjne (najczęściej filtr Kalmana). Stosowane są dwie zasady wyznaczania nastaw: przy pomocy klasycznych regulatorów PID lub przy zastosowaniu techniki sterowania optymal nego po rozdzieleniu ruchów statku na część niskoczęstotliwościową i wysokoczęstotliwo ściową.
Uzyskane w ten sposób wartości niezbędnego naporu urządzeń zapewniają:
— minimalizację pomierzonego odchylenia od żądanej pozycji i kursu,
— kompensację wpływu zakłóceń zewnętrznych
Informacja o kierunku i sile wiatru jest uzyskiwana na podstawie bieżących pomiarów, co daje możliwość w miarę dokładnego wyznaczenia siły aerodynamicznej działającej na statek. Pomocna jest tutaj procedura tzw. sprzężenia postępowego (feedforward), polegają ca na uwzględnianiu wiatru w wyznaczaniu żądanego naporu urządzeń sterujących i napędowych już w momencie jego wystąpienia, bez oczekiwania na skutek, czyli na odchylenie od pozycji lub kursu.
Natomiast wpływ falowania i prądu wyznaczany jest pośrednio przez porównanie rzeczywistej pozycji statku otrzymanej z systemu referencyjnego i oszacowanej w wyniku rozwiązania układu równań dynamiki statku, tworzących model matematyczny statku. Otrzymana ewentualnie różnica służy za podstawę do określenia dodatkowego naporu urządzeń sterujących i napędowych.
Rozdział obliczonego wypadkowego naporu i momentu niezbędnego do utrzymania powstałej różnicy pozycji i kursu w założonych granicach pomiędzy konkretne urządzenia sterujące i napędowe, dostępne w danej chwili dla sytemu dynamicznego pozycjonowania, jest
Wyszukiwarka
Podobne podstrony:
M015 1.2. Zasada działania systemu dynamic/ne^o pozycjonowania statku W rozwiązywaniu problemów zwią
M014 11. Dynamiczne Pozycjonowanie Statku11.1. Definicja manewru dynamicznego pozycjonowania W każdy
Wprowadzenie Systemy operacyjne Systemy operacyjne Zasada działania systemu
Przetworniki A/C pośrednie o przetwarzaniu impulsowo czasowym 11 Zasada działania Uw(t)=At Uw(Tx)=A
IMAG0199 Pompa zębata -zasada działania, systematyka, Konstrukcja *?ł 2 f fifrm«a alowt^d f porep zę
Działanie systemu GPS Zasada działania systemu opiera się na pomiarze odległości pomiędzy satelitą
Zasada działania systemu ASG-KUPOS Stacje referencyjne Jednym z trzech głównych segmentów systemu
Zasada działania systemu operacyjnego Informatyka i dr inż. Konrad Sobolewski Politechnika Warszawsk
Zasada działania systemu wentylacji indukcyjnej: WENTYLACJA BYTOWA stracji garażu. Przewietrzanie
431 3 11.3. ZASADA DZIAŁANIA I BUDOWA REAKTORÓW 232 90 Th + Iny + 233 Th 90 in 23,3 min2
433 3 11.3. ZASADA DZIAŁANIA I BUDOWA REAKTORÓW problemy związane z budową elementów paliwowych. Ani
435 4 11.3. ZASADA DZIAŁANIA I BUDOWA REAKTORÓW ciepła (wytwornicą pary lub bezpośrednio turbiną). C
więcej podobnych podstron