015
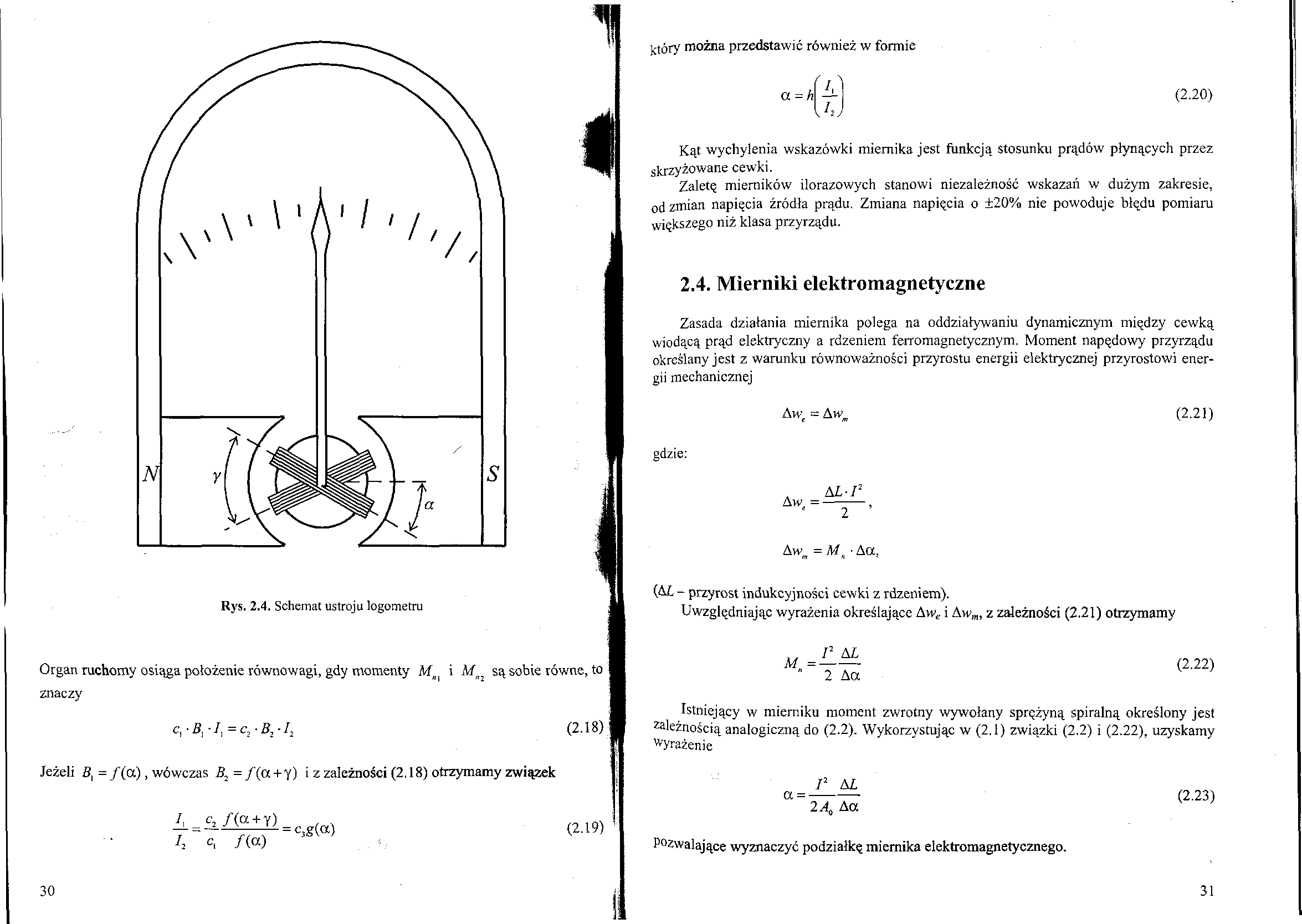
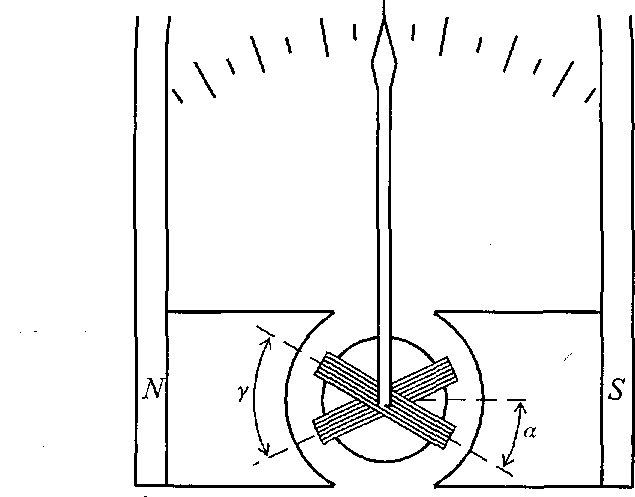

Rys. 2.4. Schemat ustroju logometru
Organ ruchomy osiąga położenie równowagi, gdy momenty Af i M są sobie równe, to znaczy
crB,-Ix=c2-B2-I2 (2.18)
Jeżeli Bt = /(a), wówczas B2= f (a + y) i z zależności (2.18) otrzymamy związek
A
h
(2.19) 1
który można przedstawić również w formie
Kąt wychylenia wskazówki miernika jest funkcją stosunku prądów płynących przez skrzyżowane cewki.
Zaletę mierników ilorazowych stanowi niezależność wskazań w dużym zakresie, od zmian napięcia źródła prądu. Zmiana napięcia o ±20% nie powoduje błędu pomiaru większego niż klasa przyrządu.
2.4. Mierniki elektromagnetyczne
Zasada działania miernika polega na oddziaływaniu dynamicznym między cewką wiodącą prąd elektryczny a rdzeniem ferromagnetycznym. Moment napędowy przyrządu określany jest z warunku równoważności przyrostu energii elektrycznej przyrostowi energii mechanicznej
Aw = Aw
e tn
gdzie:
AL-I
2
Awm = Mn ■ Aa,
(Ań - przyrost indukcyjności cewki z rdzeniem).
Uwzględniając wyrażenia określające Awe i Awm, z zależności (2.21) otrzymamy
I2 AL
M =--
2 Aa
Istniejący w mierniku moment zwrotny wywołany sprężyną spiralną określony jest zależnością analogiczną do (2.2). Wykorzystując w (2.1) związki (2.2) i (2.22), uzyskamy wyrażenie
I2 AL
a =--
2 A0 Aa
Pozwalające wyznaczyć podzialkę miernika elektromagnetycznego.
(2.23)
31
Wyszukiwarka
Podobne podstrony:
015 bmp Rys. 2.4. Schemat ustroju logometru Organ ruchomy osiąga położenie równowagi, gdy momenty M
Rys. 4. Schemat budowy dwuobwodowego głównego zaworu hamulcowego: a) położenie odhamowania, b) hamow
instalacje066 1. WSTĘP 16 Rys. J.4. Schemat działania silnika skokowego o wirniku biernym: a), b), c
Rys. 7.6. Schematy ustrojów prostokątnych obciążanych symetrycznie i asymetrycznie (oznaczenia linią
014 bmp a A-A Rys. 2.3. Schemat ustroju magne toel ekt tyczne go Moment napędowy wytworzony przez pa
a A-A r~-mzi Rys. 2.3. Schemat ustroju magne toel ekt tyczne go Moment napędowy wytworzony przez par
016 bmp 2.5. Mierniki elektrodynamiczne Rys. 2.5. Schemat ustroju elektrodynamicznego Moment napędow
AwCOSwt- Aoo Prędkość maksymalną ciała osiąga w położeniu równowagi Zależność prędkości od
Ac = pionowym z położenia równowagi i Gdy wychylimy ciało w kierunku puścimy swobodnie, zacznie ono
DSC00069 (42) Galwanometr balistyczny Pod łipływem impulsu prądu organ ruchomy odchyla się od położe
CCF20111125�006 (3) Rys. 6.12. Schemat zastępczy maszyny indukcyjnej z ruchomym wirnikiem • na różne
79 (179) 79 Rys. 3.7. Schemat układu optycznego i pomiarowego BRT 006 Zeissa paralaktycznym e. Pryzm
powietrze 1tttttt tttttt Rys.7.9. Schemat ruchomego układu
Rys. 2. Schemat wpływu zacienienia na wykres zależności wysokości położenia Słońca od kierunku
Rys. 1 Ideowy przekrój poprzeczny oraz schemat ustroju nośnego 3. Zakres stosow alności Uwarunkowani
38515 skanowanie0007 (30) 73 6 -7 - 8 -9 -10 - 16 -17 - Rys.5*1* Schemat stanowiska sbiomik a zamkni
więcej podobnych podstron