P1080285

7. Napędy robotów przemysłowych
7. Napędy robotów przemysłowych
VII

III
V
Rysunek 7.26
Struktura czterofazowego silnika skokowego reluktancyjnego
Wartość skoku tego silnika reluktancyjnego w przypadku komutacji symetrycznej («.— 1) jest równa
360° _ 360° _.j0 zrdi 30 • 4
(7.14)
a liczba skoków w jednym obrocie wirnika wynosi ns = 360°/3°tó20.
W konstrukcji na nabiegunnikach stojana są wykonane zęby (o takiej samej podziałce jak podziałka żłobkowa wirnika) w ten sposób, że pod przeciwległymi biegunami są ustawione naprzeciwko siebie zęby stojana i wirnika, a pozostałe bieguny są przesunięte o 1/4 podziałki żłobkowej do zębów wirnika. Zatem podziałka żłobkowa wirnika stanowi tr = 360°/30 = 12°. Przy komutacji niesymetrycznej ośmiotaktowej według algorytmu 1-1, 2—2—2, 3-3-3, 4-4-4, 1-1-.,. otrzymuje się skok odpowiadający 1/8 podziałki żłobkowej wirnika (skok pojedynczy stanowi: 12°/8 = 1,5° przy 240 skokach w jednym obrocie wirnika).
Rozpowszechnionym silnikiem w napędach maszyn jest silnik pięciosek-cyjny (rys. 7.27).
Każda sekcja stojana ma taką samą liczbę ząbków jak wirnik, ale przesuniętych o 1/5 podziałki. Kolejność włączania poszczególnych sekcji następuje wg dwóch sposobów: obrót o całąpodziałkę odbywa się po 5 impulsach albo po 10 impulsach sterujących.
W pierwszym przypadku elementarny obrót wałka wynosi

Z *5
w drugim przypadku

(7.15)
(7.16)
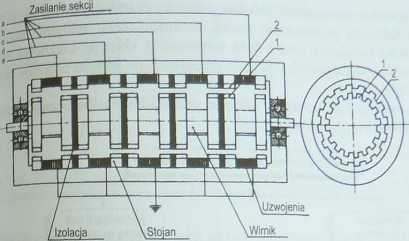
Rysunek 7.27^_
Silnik skokowy pięciosekcyjny; 1 — wirnik, 2 — stojan [84]
7.5. Przekładnie mechaniczne
Jako źródło napędu w obecnie produkowanych robotach najczęściej jest stosowany silnik elektryczny, połączony konstrukcyjnie z przekładnią mechaniczną. W układach napędowych robotów są stosowane następujące rodzaje przekładni mechanicznych:
- przekładnie do przekazywania ruchu silnika (silników) do członów jego łancuchą kinematycznego (par kinematycznych),
- przekładnie przekształcające ruch obrotowy na postępowy; stosuje się wówczas, gdy w układzie kinematycznym są ruchy translacyjne (postępowe), a silnik wykonuje ruch obrotowy,
- przekładnie redukcyjne służące do istotnej zmiany ilości mchu (prędkości obrotowej).
Tablica 7.1. Kryteria dla przekładni mechanicznych w napędach robotów [74]
|
iKiyterium |
Właściwości |
Wartość |
|
i Dokładność pozycjonowania |
luz kątowy sztywność równomierność biegu |
tf > 1'0'jsT • rn/rad ±37obr |
|
j Prędkość |
sprawność moment bezwładności |
>70% <6-5-104kg-nr |
|
Stabilność |
odporność na przeciążenia żywotność |
>50% > 5000 h | |
|
Wytrzymałość eksploatacyjna |
koszt utrzymania zwartość budowy |
niski duża — |
|
^diwości integracyjne |
dowolność położenia odwrotność kinematyki |
tak tak ---' |
Wyszukiwarka
Podobne podstrony:
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron