str046 (3)

Odnotowania wymaga, że w przeciwieństwie do nawigacyjnych systemów fazowych, w których pomiar opiera się o falę nośną, do odbiornika GPS dociera sygnat zmodulowany fazowo, c/y|| nie jest on sinusoidalną falą, lecz przenosi informację binarną (suma modulo 2: depeszy nawigacyjnej i kodu przeudoprzypadkowego satelity). Zmianom wartości fazy sygnału odpowiadają binarne wartości „1” i „0”. Ponieważ pomiar fazy wymaga sygnału sinusoidalnego, ntąd, aby go otrzymać po stronie odbiornika, niezbędnym jest jego kwadratowanie. Polega ano, w pierwszej kolejności, na przetworzeniu sygnału do częstotliwości pośredniej i wymnoże-niu sygnału przez samego siebie w celu otrzymania drugiej harmonicznej jego częstotliwości. I >!n przykładowego sygnału GPS na częstotliwości LI proces ten możemy zapisać jako:
(S„ )2 = (D0C/ A)2 ■ cos- (mt + <p) = (D©C / A)2 ■ [l + cos(2wt + 2, (4.47)
gdzie:
(0 - pulsacja,
r/> - faza częstotliwości pośredniej,
St | - sygnał częstotliwości LI,
/) - depesza nawigacyjna GPS,
( 7/1 - kod pseudoprzypadkowy C/A.
oe
Ponlawn* c/.ynnlk /> d> ( / równania, będący inpio/milMln /minii wartoftcl d«pon/y
GPS I kodu ps«udopr*ypadkowogo, znwsze odpowlrtdn wartowniom l luli I, to Jogo kwndmi (D © C / Af przyjmie kużdom/towo stałą wartość równą ' l W ton sposób nie będzie on wpływał na przebieg częstotliwości nośnej. Stąd po kwmlmlowąnlu, sygnały danych niosą cych Informacjo zostaną rozdzielone z sygnałom nośnym, niezbędnym dla procesu pomiaru fazy (rys. 4.12).
Sygnał zmodulowany blfazowo

Rys. 4.12. Uproszczony schemat wstępnego przetworzenia sygnatu zmodulowanogo w pomiarach fazowych do drugiej harmonicznej.
4.1.3.3.2.2. Pseudoodległość w pomiarach fazowych
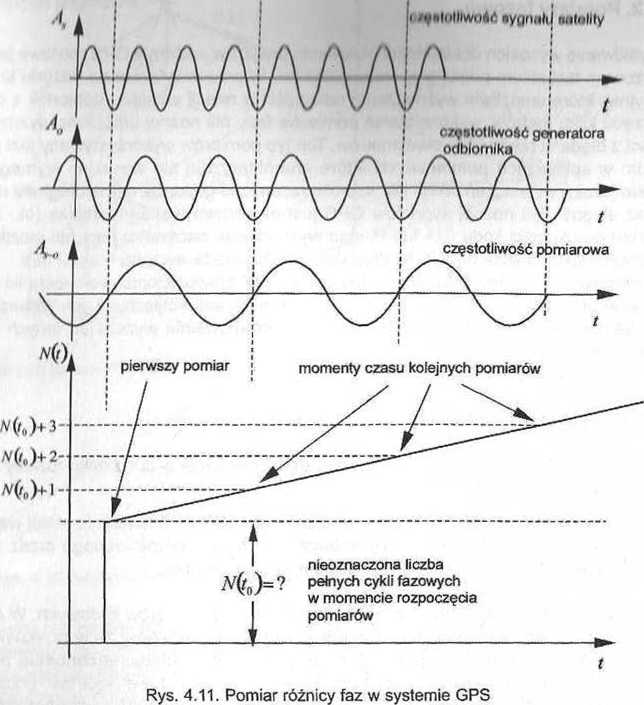
Odbiornik fazowy systemu GPS mierzy różnicę faz pomiędzy: fazą sygnatu satelitarnego <ps(0 oraz fazą sygnału pochodzącego z generatora wewnętrznego odbiornika <p"(r). Wspoin niany pomiar może być zrealizowany w mierze kątowej i jednocześnie w ramach pojedynczego cyklu fazowego. W wyniku pomiaru otrzymamy różnicę faz postaci:
(4.40)
(p' "= (ps(/) - tp°{t),
gdzie:
cp1’" - różnica faz pomiędzy sygnałem satelitarnym oraz sygnałem generatora wewnętrznego
odbiornika,
<p'(?) - faza sygnału satelitarnego,
(p°(f) - faza sygnału pochodzącego z generatora wewnętrznego odbiornika.
Zmienne prawej strony równania, w funkcji częstotliwości sygnałów satelity i generałom wewnętrznego odbiornika oraz faz początkowych można przedstawić w poniższej formie:
<P*(0=PoJ - (4.49)
c
cP°(0=/°r_(Po . (4.50)
gdzie:
(p„ - faza początkowa sygnału satelitarnego,
(p,f - faza początkowa sygnału generatora wewnętrznego odbiornika GPS, f° - częstotliwość generatora wewnętrznego odbiornika GPS, fs - częstotliwość sygnału satelitarnego.
97
Wyszukiwarka
Podobne podstrony:
img062 o 38. Pielęgniarka w procesie edukacyjnym powinna przekazać pacjentowi, że przeciwwskaza
50 -lecie Polskiej Radiolokacji oznacza że w przeciwieństwie do radarów wysyłających w przestrzeń
Kłopoty ze zbyt bliską kulturą albo antropologia na własnym podwórku liła, że w przeciwieństwie do
img383 (2) f
Wymagane dokumenty niezbędne do funkcjonowania systemów wodociągowo- kanalizacyjnych w zakładach
ScannedImage 38 12 - że w przeciwieństwie do Zgromadzenia poprzedniego w Uppsali, do tych zagadnień
Inne podejście do motywowania pracy, to teoria sprawiedliwości. Opiera się na założeniu, że ważnym
HPIM0797 4. Wprowmiienle do kinematyki robotów go. Zgodnie z tym, opierając się na współrzędnych pun
minimalne. Są to zazwyczaj organizacje o wysmukłej strukturze. System wynagradzania takich firm opie
Systemy polityczne współczesnego świata Opiera się na wzajemnym uzależnieniu się partii; na tym, iż
04 06 ści. Rzeczywiste pomiary opierają się na założeniu, że sygnały mają kształt prawie idealnie
7. BEZPIECZEŃSTWO NARODOWE Właściwie funkcjonujący system obrony państwa musi opierać się na czterec
więcej podobnych podstron