instalacje105
4. Teoria silnika skokowego
4.1. Stany pracy silnika skokowego
Istotne znaczenie mają następujące stany pracy silnika skokowego:
— statyczny;
— ąuasistatyczny;
— ustalony;
— dynamiczny (przejściowy).
W stanie statycznym, w uzwojeniach silnika skokowego występuje prąd stały, wytwarzając nieruchome pole magnetyczne. Na wirnik działa moment synchronizujący, który dąży do przywrócenia początkowego położenia równowagi, naruszonego po zadziałaniu momentu z zewnątrz.
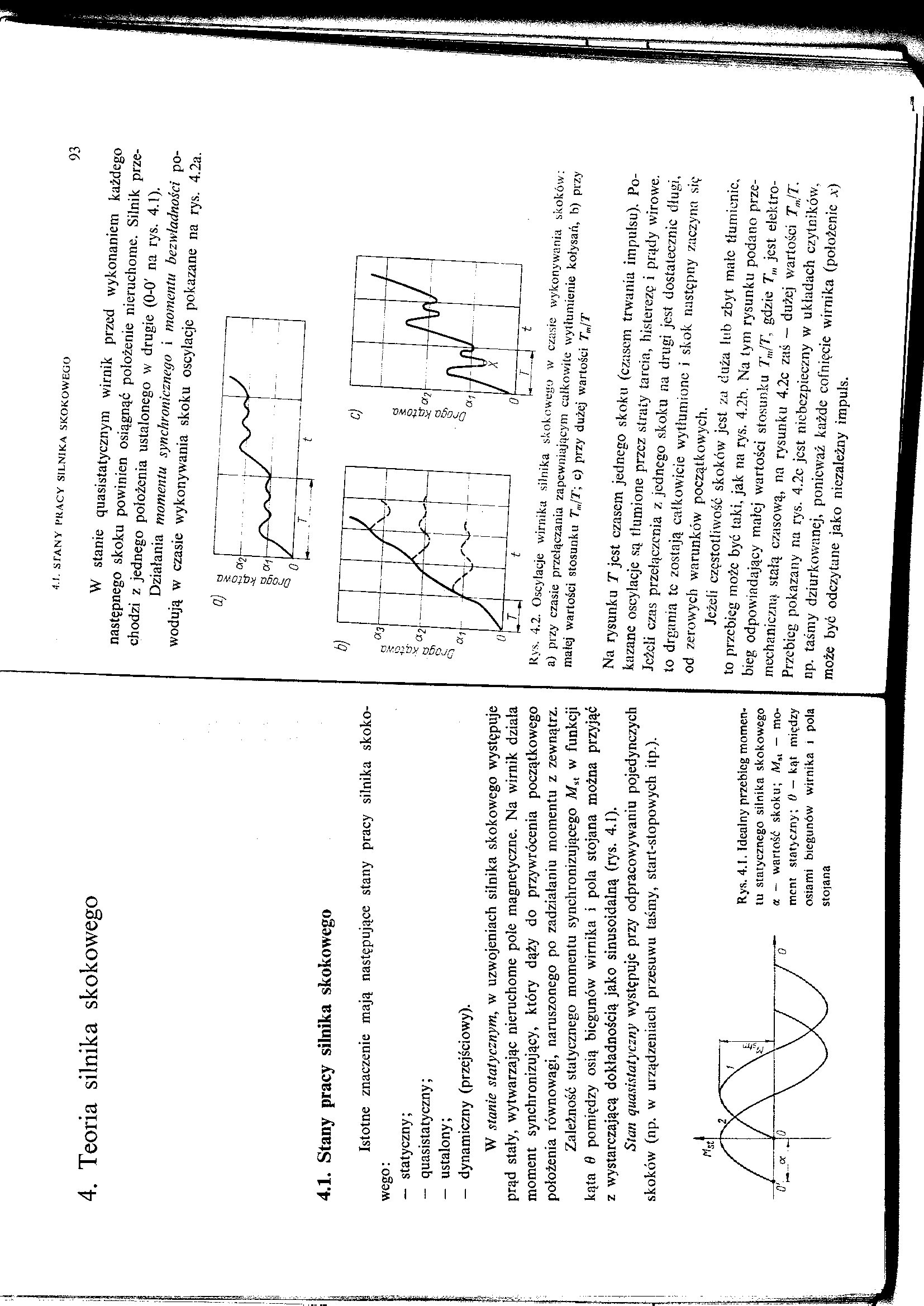
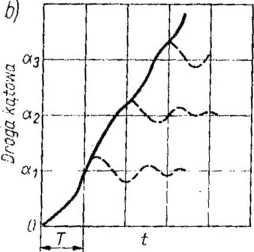
Zależność statycznego momentu synchronizującego Mst w funkcji kąta 8 pomiędzy osią biegunów wirnika i pola stojana można przyjąć z wystarczającą dokładnością jako sinusoidalną (rys. 4.1).
Stan ąuasistatyczny występuje przy odpracowywaniu pojedynczych skoków (np. w urządzeniach przesuwu taśmy, start-stopowych itp.).
Rys. 4.1. Idealny przebieg momentu statycznego silnika skokowego a - wartość skoku; — moment statyczny; 0 - kąt między osiami biegunów wirnika i pola stoiana
W stanie quasistatycznym wirnik przed wykonaniem każdego następnego skoku powinien osiągnąć położenie nieruchome. Silnik przechodzi z jednego położenia ustalonego w drugie (0-0' na rys. 4.1).
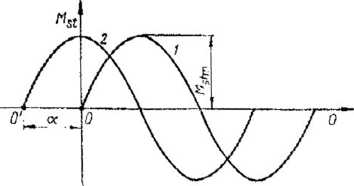
Działania momentu synchronicznego i momentu bezwładności powodują w czasie wykonywania skoku oscylacje pokazane na rys. 4.2a.
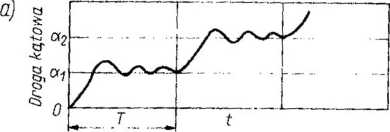
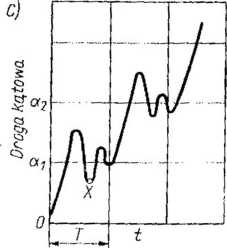
Rys. 4.2. Oscylacje wirnika silnika skokowego w czasie wykonywania skoków: a) przy czasie przełączania zapewniającym całkowite wytłumienie kołysań, b) przy małej wartości stosunku TJT; c) przy dużej wartości TJT
Na rysunku T jest czasem jednego skoku (czasem trwania impulsu). Pokazane oscylacje są tłumione przez straty tarcia, histerezę i prądy wirowe. Jeżeli czas przełączenia z jednego skoku na drugi jest dostatecznie długi, to drgania tc zostają całkowicie wytłumione i skok następny zaczyna się od zerowych warunków początkowych.
Jeżeli częstotliwość skoków jest za duża lub zbyt małe tłumienie, to przebieg może być taki, jak na rys. 4.2b. Na tym rysunku podano przebieg odpowiadający małej wartości stosunku TJT, gdzie Tm jest elektromechaniczną stałą czasową, na rysunku 4.2c zaś — dużej wartości TJT. Przebieg pokazany na rys. 4.2c jest niebezpieczny w układach czytników, np. taśmy dziurkowanej, ponieważ każde cofnięcie wirnika (położenie a) może być odczytane jako niezależny impuls.
Wyszukiwarka
Podobne podstrony:
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
instalacje115 4. TEORIA SILNIKÓW SKOKOWYCH 112 Moc maksymalna występuje kiedy /? = 0, punktem pracy
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
45996 instalacje114 4. TEORIA SILNIKÓW SKOKOWYCH 110 Ten wzór został uzyskany teoretycznie przy impe
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
więcej podobnych podstron