str045 (3)
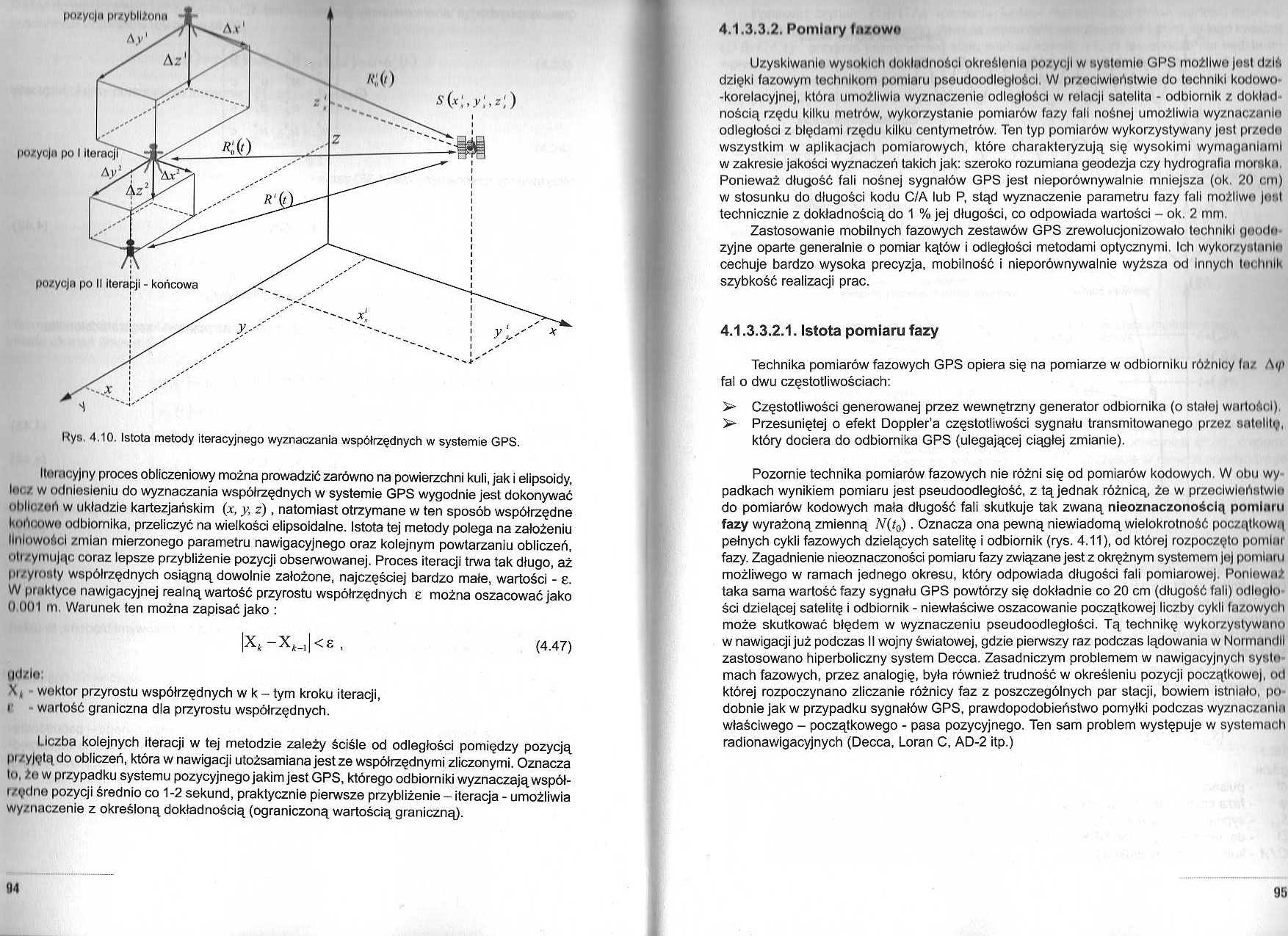

Ilorncyjny proces obliczeniowy można prowadzić zarówno na powierzchni kuli, jak i elipsoidy, lot;/ w odniesieniu do wyznaczania współrzędnych w systemie GPS wygodnie jest dokonywać '>l>lli:/oń w układzie kartezjańskim (x, y, z), natomiast otrzymane w ten sposób współrzędne kopcowe odbiornika, przeliczyć na wielkości elipsoidalne. Istota tej metody polega na założeniu liniowości zmian mierzonego parametru nawigacyjnego oraz kolejnym powtarzaniu obliczeń, nli/ymu|ąn coraz lepsze przybliżenie pozycji obserwowanej. Proces iteracji trwa tak długo, aż pi/yronty współrzędnych osiągną dowolnie założone, najczęściej bardzo małe, wartości - e. W pi.iklyce nawigacyjnej realną wartość przyrostu współrzędnych e można oszacować jako
0 001 m. Warunek ten można zapisać jako :
lX.-XM|<6, (4.47)
gdzie
X < wektor przyrostu współrzędnych w k - tym kroku iteracji,
1 wartość graniczna dla przyrostu współrzędnych.
Liczba kolejnych iteracji w tej metodzie zależy ściśle od odległości pomiędzy pozycją przyjętą do obliczeń, która w nawigacji utożsamiana jest ze współrzędnymi zliczonymi. Oznacza to. że w przypadku systemu pozycyjnego jakim jest GPS, którego odbiorniki wyznaczają współ-i/ędne pozycji średnio co 1-2 sekund, praktycznie pierwsze przybliżenie - iteracja - umożliwia wyznaczenie z określoną dokładnością (ograniczoną wartością graniczną).
4.1.3.3.2. Pomiary fazowo
Uzyskiwanie wysokich dokładności określeniu pozycji w systemie GPS możliwe jest dziś dzięki fazowym technikom pomiaru pseudoodlogloścl. W przeolwleństwle do techniki kodowo--korelacyjnej, która umożliwia wyznaczenie odległości w relacji satelita - odbiornik / doklnd nością rzędu kilku metrów, wykorzystanie pomiarów fazy fali nośnej umożliwia wyznaczanie odległości z błędami rzędu kilku centymetrów. Ten typ pomiarów wykorzystywany jest przede wszystkim w aplikacjach pomiarowych, które charakteryzują się wysokimi wymaganiami w zakresie jakości wyznaczeń takich jak: szeroko rozumiana geodezja czy hydrografie morska. Ponieważ długość fali nośnej sygnałów GPS jest nieporównywalnie mniejsza (ok. 20 cm) w stosunku do długości kodu C/A lub P, stąd wyznaczenie parametru fazy fali możliwe Jest technicznie z dokładnością do 1 % jej długości, co odpowiada wartości - ok. 2 mm.
Zastosowanie mobilnych fazowych zestawów GPS zrewolucjonizowało techniki goudo zyjne oparte generalnie o pomiar kątów i odległości metodami optycznymi. Ich wykorzystanie cechuje bardzo wysoka precyzja, mobilność i nieporównywalnie wyższa od Innych li" linii' szybkość realizacji prac.
4.1.3.3.2.1. Istota pomiaru fazy
Technika pomiarów fazowych GPS opiera się na pomiarze w odbiorniku różnicy fu/ \</> fal o dwu częstotliwościach:
> Częstotliwości generowanej przez wewnętrzny generator odbiornika (o stałej wartości).
> Przesuniętej o efekt Doppler'a częstotliwości sygnału transmitowanego przez satelitę,
który dociera do odbiornika GPS (ulegającej ciągłej zmianie).
Pozornie technika pomiarów fazowych nie różni się od pomiarów kodowych. W obu wy padkach wynikiem pomiaru jest pseudoodległość, z tą jednak różnicą, że w przeciwieństwie do pomiarów kodowych mała długość fali skutkuje tak zwaną nieoznaczonością pomiaru fazy wyrażoną zmienną N(t0). Oznacza ona pewną niewiadomą wielokrotność początkową pełnych cykli fazowych dzielących satelitę i odbiornik (rys. 4.11), od której rozpoczęto pomiar fazy. Zagadnienie nieoznaczoności pomiaru fazy związane jest z okrężnym systemem jo| pominie możliwego w ramach jednego okresu, który odpowiada długości fali pomiarowej. Ponleweż taka sama wartość fazy sygnału GPS powtórzy się dokładnie co 20 cm (długość fali) odległości dzielącej satelitę i odbiornik - niewłaściwe oszacowanie początkowej liczby cykli fn/owych może skutkować błędem w wyznaczeniu pseudoodległości. Tą technikę wykorzystywane w nawigacji już podczas II wojny światowej, gdzie pierwszy raz podczas lądowania w Normandii zastosowano hiperboliczny system Decca. Zasadniczym problemem w nawigacyjnych syste mach fazowych, przez analogię, była również trudność w określeniu pozycji początkowej, od której rozpoczynano zliczanie różnicy faz z poszczególnych par stacji, bowiem istniało, po dobnie jak w przypadku sygnałów GPS, prawdopodobieństwo pomyłki podczas wyznaczanie właściwego - początkowego - pasa pozycyjnego. Ten sam problem występuje w systemach radionawigacyjnych (Decca, Loran C, AD-2 itp.)
95
Wyszukiwarka
Podobne podstrony:
Procesy ciągłe i okresowe Procesy technologiczne można prowadzić w sposób okresowy i ciągły. Procese
Układy technologiczne do procesu flotacji. Procesy flotacji można prowadzić w następujących układach
180 Barbara Woźniak-Sobczak Badania prowadzone zarówno na gruncie polskim, europejskim, jak i w USA
Algorytmy i VBA Zmienne można deklarować zarówno na poziomie modułu (wówczas mają zasięg na cały mod
Ocena poszkodowanego jest procesem złożonym i można go podzielić na kilka następujących etapów.
DSCF0209 katastrofie lub w jej obliczu jest więc wyrazem instynktu przetrwania zarówno na poziomie j
PC190014 0 rożnym czasie trwania i różnym mechanizmie. Procesy te można po. d
2tom138 5. MASZYNY ELEKTRYCZNE 278 w wirniku oraz Ras w stojanie można wpływać zarówno na pochylenie
img239 (16) Niektóre drobnoustroje mogą przekształcać aminokwasy zarówno na drodze dcaminacji, jak i
IMGP3579 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
b. Nie wpłynie zarówno na krajowe oszczędności, jak i na oszczędności publiczne c.
OMiUP t1 Gorski27 I zarówno na powierzchni wody (dzięki powolnemu przepływowi wody przez skrzynię),
IMG?65 2009 roku sygn. akt II AKz 358/09, gdzie Sąd wskazał na j^. rozstrzygnięcia zarówno na materi
IMG 100. Procesy hipergeniczńe? Procesy hipergeniczne inaczej egzogeniczne zachodzą na powierzchni
IMG#50 SoIarymcCre-n Gorczyńskiego można zmierzyć zarówno promieniowani:: bezpośrednie rozproszone
więcej podobnych podstron