kolo 2

Test zaliczeniowy 3 Podstawy automatyki i roDotym ^——.......
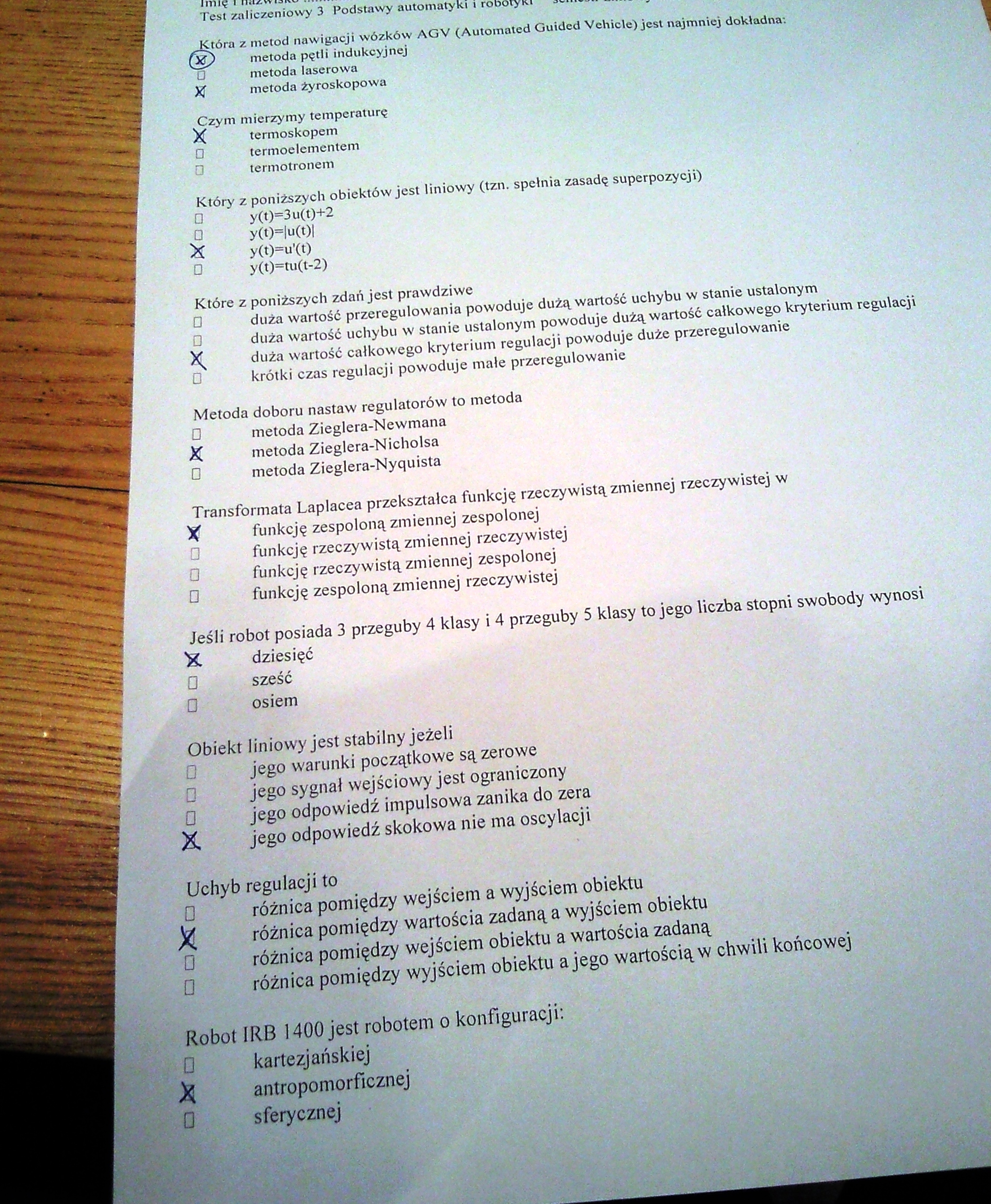
.Która z metod nawigacji wózków AGV (Automated Guided Vehicle) jest najmniej dokładna:
Q0y metoda pętli indukcyjnej
O metoda laserowa
metoda żyroskopowa
Czym mierzymy temperaturę X tcrmoskopem
0 termoelementem
termotronem
Któiy z poniższych obiektów jest liniowy (tzn. spełnia zasadę superpozycji)
0 y(t)=3u(t)-ł-2
0 y(0=|u(t)|
X y(t)=u'(t)
D y(t)=tu(t-2)
Które z poniższych zdań jest prawdziwe
duża wartość przeregulowania powoduje dużą wartość uchybu w stanie ustalonym duża wartość uchybu w stanie ustalonym powoduje dużą wartość całkowego kryterium regulacji X duża wartość całkowego kryterium regulacji powoduje duże przeregulowanie
0 krótki czas regulacji powoduje małe przeregulowanie
Metoda doboru nastaw regulatorów to metoda 0 metoda Zieglera-Newmana
A metoda Zieglera-Nicholsa
0 metoda Zieglera-Nyquista
Transformata Laplacea przekształca funkcję rzeczywistą zmiennej rzeczywistej w X funkcję zespoloną zmiennej zespolonej
funkcję rzeczywistą zmiennej rzeczywistej funkcję rzeczywistą zmiennej zespolonej funkcję zespoloną zmiennej rzeczywistej
Jeśli robot posiada 3 przeguby 4 klasy i 4 przeguby 5 klasy to jego liczba stopni swobody wynosi '& dziesięć
□ sześć
□ osiem
Obiekt liniowy jest stabilny jeżeli
jego warunki początkowe są zerowe jego sygnał wejściowy jest ograniczony jego odpowiedź impulsowa zanika do zera X je go odpowiedź skokowa nie ma oscylacji
Uchyb regulacji to
D różnica pomiędzy wejściem a wyjściem obiektu % różnica pomiędzy wartością zadaną a wyjściem obiektu
0 różnica pomiędzy wejściem obiektu a wartością zadaną
różnica pomiędzy wyjściem obiektu a jego wartościąw chwili końcowej
Robot 1RB 1400 jest robotem o konfiguracji: 0 kartezjańskiej
X antropomorficznej
D sferycznej
Wyszukiwarka
Podobne podstrony:
kolo 2 ■ . - li))ię i nn*.v» Ulw ________ Test zaliczeniowy 3 Podstawy automatyki i roboryKi
pnz1 <łixfc.s.i (nr grupy)TEST ZALICZENIOWY Z PODSTAW NAUK O ZIEMI 1 Kierunek wiatru w meteorolog
LastScan 2 Test zaliczeniowy z podstaw biostatystyki - wykład ZP Imię i nazwisko.......^4*—
biostat0003 Test zaliczeniowy z podstaw biostalystyki — wykład ZP Imię i
biostat0004 i ■ Test zaliczeniowy z podstaw biostatystyki — wykład ZP Imię i
biostat0005 Test zaliczeniowy z podstaw biostatysWki - wykład ZP Imię i
biostat0010 Test zaliczeniowy z podstaw biostatystyki - wykład ZP Imię i
biostat0014 Test zaliczeniowy z podstaw hipstalystyki — wykład ZP Imię i
biostat0016 Test zaliczeniowy z podstaw biostatystyki - wykład ZP Imię i nazwisko...................
biostat0019 Test zaliczeniowy z podstaw biostatystyki - wykład ZP Imię i nazwisko...................
biostat0021 Test zaliczeniowy z podstaw biostatystyki - wykład ZP .( Imię i
Strona główna ► Moje kursy ► BHP-WSG-A-050/13Z ► Podstawowe akty prawne ► Test zaliczeniowy - Podsta
10. Która z metod nawigacji AGV jest najmniej dokładna? a) metoda pętli indukcyjne
Pytania na AiR 2009/2010 by WKS v.2.0 1. Która z metod nawigacji AGV jest najmniej
HES? Inżynieria Środowiska - Podstawy prawodawstwa i ekonomii Test zaliczający: wersja A 8. Przedsię
więcej podobnych podstron