81438 str14 (14)
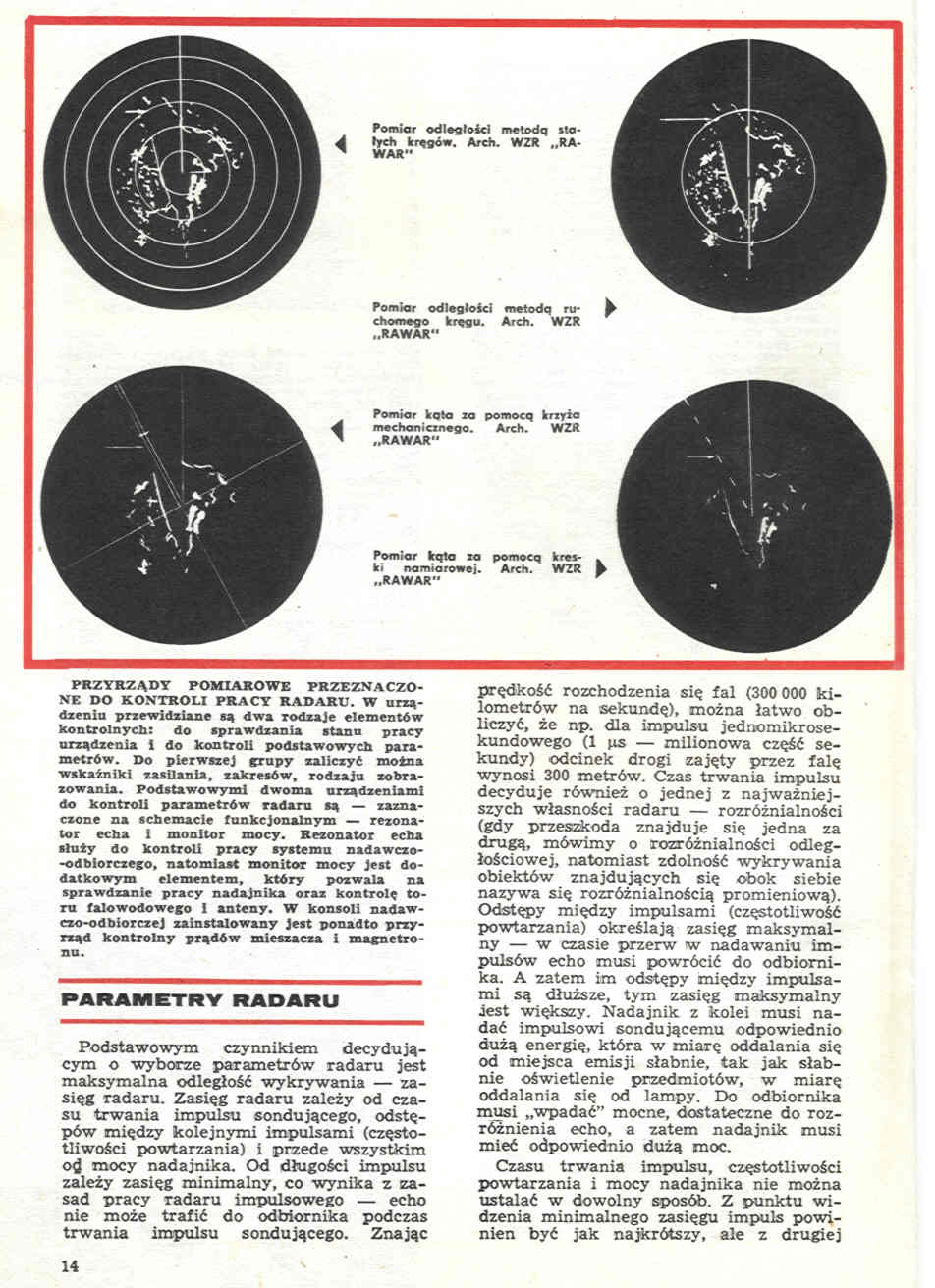
Pomiar odległości metoda *ta-rych kręgów. Arch. WZR „RA-WAR"
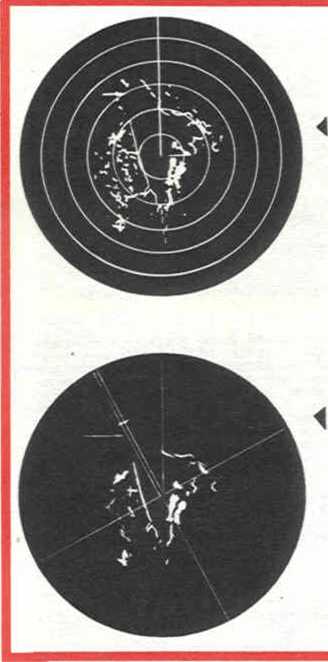
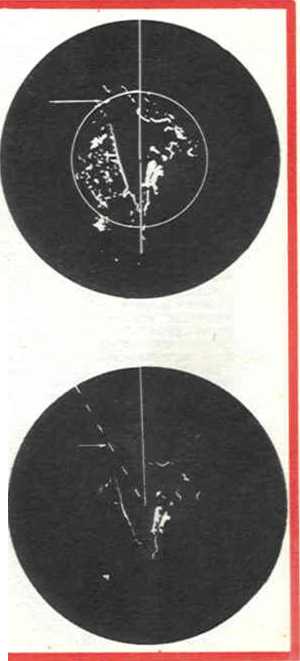
Pomiar kota za pomocą krzyża mechanicznego. Arch. WZR f,RAWAR"
Pomiar odległości metodq ru* ^
chomego kręgu. Arch. WZR ..RAWAR"
Pomiar kąta za pomocą kres- . ki namiarowej. Arch. WZR m ..RAWAR"
PRZYRZĄDY POMIAROWE PRZEZNACZONE DO KONTROLI PRACY RADARU. W urządzeniu przewidziane są dwa rodzaje elementów kontrolnych: do sprawdzania stanu pracy
urządzenia i do kontroli podstawowych parametrów. Do pierwszej grupy zaliczyć motna wskaźniki zasilania, zakresów, rodzaju zobrazowania. Podstawowymi dwoma urządzeniami do kontroli parametrów radaru są — zaznaczone na schemacie funkcjonalnym — rezonator echa 1 monitor mocy. Rezonator echa słuły do kontroli pracy systemu nadawczo--odbiorczego, natomiast monitor mocy Jest dodatkowym elementem, który pozwala na sprawdzanie pracy nadajnika oraz kontrolę toru falowodowego 1 anteny. W konsoli nadawczo-odbiorczej zainstalowany Jest ponadto przyrząd kontrolny prądów miesza cza i magnetro-nu.
PARAMETRY RADARU
Podstawowym czynnikiem decydującym o wyborze parametrów radaru jest maksymalna odległość wykrywania — zasięg radaru. Zasięg radaru zależy od czasu trwania impulsu sondującego, odstępów między kolejnymi impulsami (częstotliwości powtarzania) i przede wszystkim od mocy nadajnika. Od długości impulsu zależy zasięg minimalny, co wynika z zasad pracy radaru impulsowego — echo nie może trafić do odbiornika podczas trwania impulsu sondującego. Znając prędkość rozchodzenia się fal (300 000 kilometrów na sekundę), można łatwo obliczyć, że np. dla impulsu jednomikrose-kundowego (1 ps — milionowa część sekundy) odcinek drogi zajęty przez falę wynosi 300 metrów. Czas trwania impulsu decyduje również o jednej z najważniejszych własności radaru — rozróżnialności (gdy przeszkoda znajduje się jedna za drugą, mówimy o rozróżnialności odległościowej, natomiast zdolność wykrywania obiektów znajdujących się obok siebie nazywa się rozróżnialnością promieniową). Odstępy między impulsami (częstotliwość powtarzania) określają zasięg maksymalny — w czasie przerw w nadawaniu impulsów echo musi powrócić do odbiornika. A zatem im odstępy między impulsami są dłuższe, tym zasięg maksymalny jest większy. Nadajnik z kolei musi nadać impulsowi sondującemu odpowiednio dużą energię, która w miarę oddalania się od miejsca emisji słabnie, tak jak słabnie oświetlenie przedmiotów, w miarę oddalania się od lampy. Do odbiornika musi „wpadać” mocne, dostateczne do rozróżnienia echo, a zatem nadajnik musi mieć odpowiednio dużą moc.
Czasu trwania impulsu, częstotliwości powtarzania i mocy nadajnika nie można ustalać w dowolny sposób. Z punktu widzenia minimalnego zasięgu impuls powinien być jak najkrótszy, ale z drugiej
14
Wyszukiwarka
Podobne podstrony:
skrypt079 Voltomls^ ampawy u Metoda pomiaru stratności za pomocą miernika dobroci AC, (4.25) Śnie mi
Sposoby inicjalizacji pomiaru metodą statyczną przed przystąpieniem do pomiaru kinematycznego -za po
Metody cd. Pomiarów dokonywano za pomocą powierzchniowego EMG, aparatem NeuroTrac ETS, z użyciem ele
img144 (3) - przed rozpoczęciem obserwacji zwrócic uwagą na podział: kota pionowego. Przu pomiarze k
3. Pomiar położenia za pomocą potencjometru o liniowej CHARAKTERYSTYCE Potencjometr Potencjometr
BM ISE Specyfikacja: • Zasada pomiaru - pomiar bezpośredni za pomocą
DSC00059 -Pomiar pośredni za pomocą kulekIX = 20,571mm = 20,599mm A/,=Mń = 20,079mm =23,896mm n 0,00
pomiary ci?nie?�7 -2 - 3. Pomiar ciśnień za pomocą sond 3.1. Ciśnienie dynamiczne pd mierzone sondąP
Błędy systematyczne Zawsze w ten sam sposób wpływają na wyniki pomiarów wykonanych za pomocą tej sam
4. Układ pomiarowy5. Wyniki Za pomocą metody różniczki zupełnej wyznaczono współczynnik osłabienia
301 (10) 15 Radar w nawigacji 301 5. Dane pomiarowe uzyskane za pomocą radaru mogą
TRECJN3D Measurements Pomiar trajektorii za pomocą Laser Tracker su mnmiss ms
6-2012 TRIBOLOGIA 33 Należy też podkreślić, że pomiary wykonywane za pomocą systemu wyzwalające
więcej podobnych podstron