23 luty 07 (125)

Para kinematyczna klasa 5 postępowa - suwak i prowadnica
Możliwe są trzy warianty uwalniania od więzów w zależności od przyjętego modelu pary kinematycznej i przypadek szczególny (wariant czwarty).
Wariant A
Znany jest punkt przyłożenia siły reakcji w środku suwaka oraz jej kierunek, który w przypadku pominięcia tarcia jest prostopadły do prowadnicy.
Nieznane są: wartość siły oraz wartość momentu pary sił, który musimy przyłożyć, aby układ był w równowadze - dwie niewiadome. Ten sposób uwalniania od więzów jest wygodny przy rozwiązywaniu zadań bez uwzględnienia tarcia.
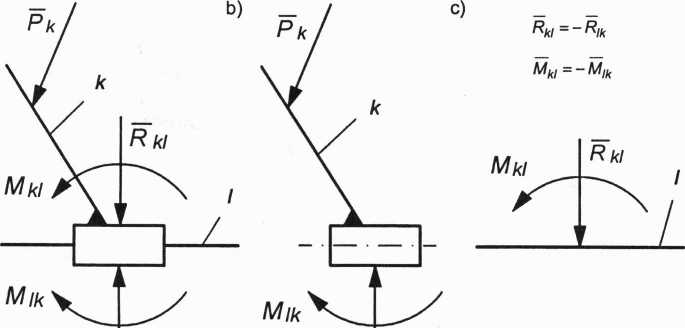
Uwalnianie od więzów członów w parze postępowej wg wariantu A przedstawiono na rysunkach 3.9a, b i c.
Poszczególne rysunki przedstawiają:
rysunek 3.9a - parę kinematyczną suwak k i prowadnicę /, w której działają siły reakcji Rk/ = -R//f, oraz momenty pary sił Mk/ =-Mtk\
rysunki 3.9b i c - dwa rozłączone człony z przyłożonymi siłami reakcji; Pk jest dowolną siłą zewnętrzną działającą na człon k.
a)
R lk
Rlk
Rys. 3.9. Uwalnianie od więzów członów w parze postępowej według wariantu A Wariant B
Zakłada się, że suwak k styka się z prowadnicą / jedynie na swoich krawędziach w punktach M i N. Znane są kierunki reakcji, które są prostopadłe do prowadnicy (w przypadku gdy tarcie pominięto).
Nieznane są wartości dwóch sił reakcji - dwie niewiadome.
124
Wyszukiwarka
Podobne podstrony:
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (38) 2. ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH2.1. CELI ZAKRESANALIZY KINEMATYCZNEJ ME
23 luty 07 (93) 2.3.2. Analiza kinematyczna przekładni kołowych Przekładnie kołowe są mechanizmami k
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
więcej podobnych podstron