23 luty 07 (127)
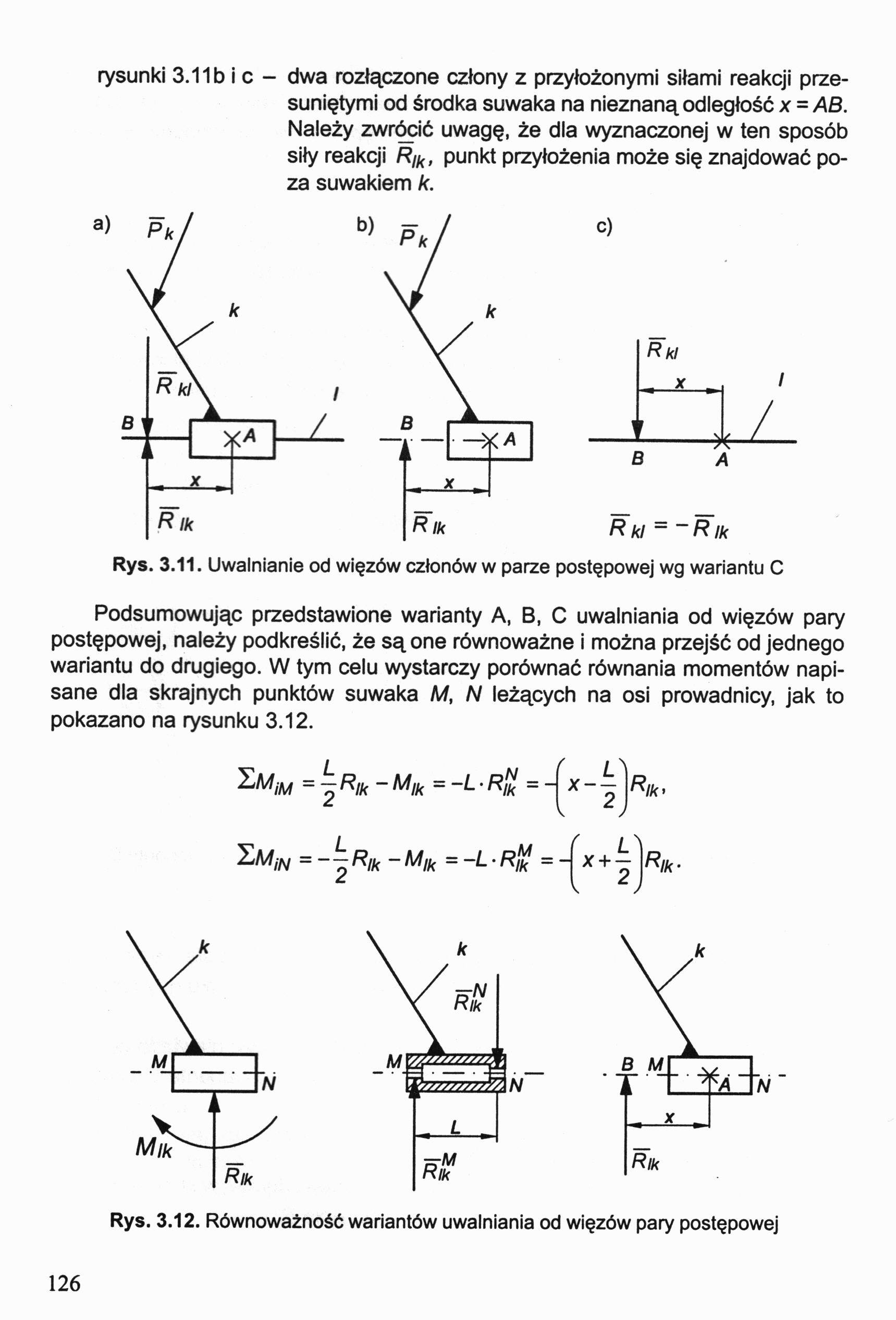
rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesuniętymi od środka suwaka na nieznaną odległość x = AB. Należy zwrócić uwagę, że dla wyznaczonej w ten sposób siły reakcji R^, punkt przyłożenia może się znajdować poza suwakiem k.
Rys. 3.11. Uwalnianie od więzów członów w parze postępowej wg wariantu C
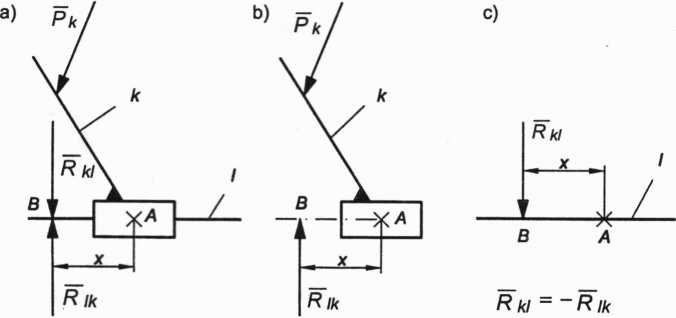
Podsumowując przedstawione warianty A, B, C uwalniania od więzów pary postępowej, należy podkreślić, że są one równoważne i można przejść od jednego wariantu do drugiego. W tym celu wystarczy porównać równania momentów napisane dla skrajnych punktów suwaka M, N leżących na osi prowadnicy, jak to pokazano na rysunku 3.12.
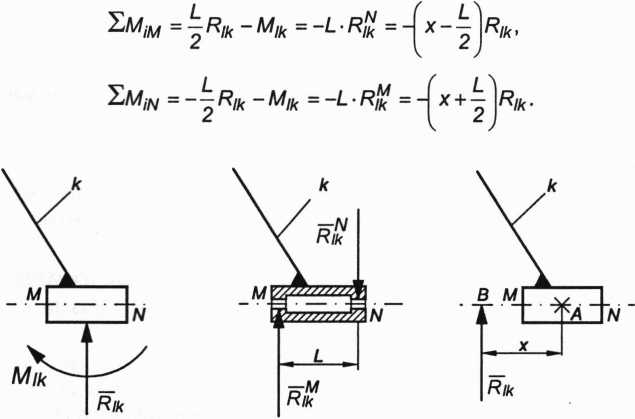
Rys. 3.12. Równoważność wariantów uwalniania od więzów pary postępowej
126
Wyszukiwarka
Podobne podstrony:
24 luty 07 (18) Ri RktT oznaczają w przypadku występowania tarcia ruchowego reakcje całkowite, jakim
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (11) Niejednokrotnie zachodzi potrzeba uwzględnienia odkształcalności (podatności) niektó
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (138) Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunko
23 luty 07 (13) Człon swobodny posiada na płaszczyźnie trzy stopnie swobody: dwa przesunięcia xA, yA
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (78) Każdy z wektorów /,- tego wieloboku zdefiniowany jest we współrzędnych biegunowych p
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
więcej podobnych podstron