24 luty 07 (71)

ruch postępowy masa mc = m3 + m2c pozostaje niewyrównoważona i dlatego środek masy mechanizmu porusza się po linii prostej (po osi Ox). W tym przypadku wyrównoważona została składowa pionowa wektora głównego sił bezwładności By = Ó, natomiast składowa pozioma pozostaje różna od zera Bx * 0.
W analogiczny sposób można przeprowadzić wyrównoważenie statyczne całkowite lub częściowe dla mechanizmu czworoboku przegubowego. Rysunki 3.89 i 3.90 pokazują rzeczywiste rozwiązanie konstrukcyjne przeciwciężaru przy częściowym wyrównoważeniu mechanizmu sprężarki tłokowej jednocylindrowej.
i

Rys. 3.89. Wyrównoważanie mechanizmu korbowo-suwakowego sprężarki tłokowej jednocylindrowej - konstrukcja wału korbowego z przeciwciężarem
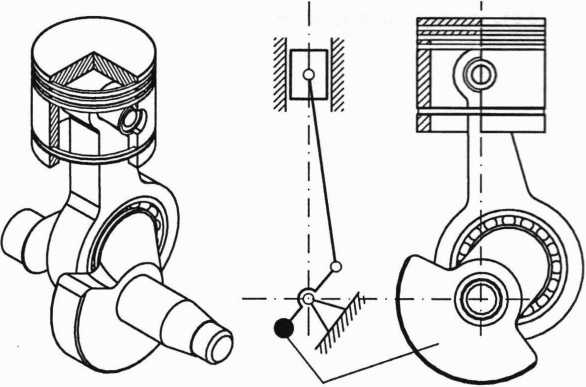
Masa korekcyjna (przeciwciężar)
Rys. 3.90. Wyrównoważanie mechanizmu korbowo-suwakowego sprężarki tłokowej jednocylindrowej - schemat rozmieszczenia przeciwciężarów
221
Wyszukiwarka
Podobne podstrony:
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (70) Zastąpienie członu 2 dwiema masami zastępczymi m2B, <^2C nie zmienia jego masy, j
24 luty 07 (79) Energia kinetyczna /-tego członu wykonującego ruch postępowy wyraża się wzorem 7
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
24 luty 07 (11) Uogólnionym przesunięciem przygotowanym <% w ruchu postępowym lub 8ęj w ruchu obr
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (17) 3.4.2. Modele tarciaw parach kinematycznych postępowych klasy 5 W warunkach tarcia ś
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (99) stąd po rozdzieleniu zmiennych (O > t jdco = — j[Mc(t)-Mb(t)]dt
DSC03065 Podstawowe wielkości i Jednostki Ruch postępowy: masa m[kg] siła F [N], [kG] 1 kG=9.81
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (56) Kolejność postępowania w metodzie planów prędkości i przyspieszeń: 1. &n
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
więcej podobnych podstron