250 (15)
250 Podstawy nawigacji morskiej
Błędy systematyczne można usunąć przez zastosowanie protraktora. bądź leż przez dodawanie lub odejmowanie od namiarów stałej wartości kątowej £ = +5°. Po wykreśleniu tak poprawionych namiarów, uzyskuje się dwa trójkąty błędów, których odpowiednie wierzchołki łączy się liniami prostymi. Linie te muszą się przeciąć w jednym punkcie PO.
Trójkąt błędów powstaje z następujących przyczyn:
• błędy w identyfikacji obiektów namierzonych,
• błędy wykreślania namiarów na mapie,
• stopień dokładności instrumentalnej kompasu,
• błąd całkowitej poprawki kompasu,
• niejednoczesność pomiarów,
• stopień dokładności kartograficznej mapy,
• błędy losowe pomiaru.
Jeżeli każdy namiar nie jest obarczony błędem systematycznym, lub gdy zachodzi obawa, że w procesie pomiarowym namiarów znajdują się błędy przypadkowe, to usuwanie trójkąta błędów przedstawionymi wcześniej metodami graficznymi jest niewskazane. W takiej sytuacji najlepiej jest przyjąć pozycję w środku koła wpisanego w trójkąt błędów.
Wykorzystanie protraktora
W celu uzyskania trzech namiarów wolnych od błędów' systematycznych, należy wykonać następujące czynności:
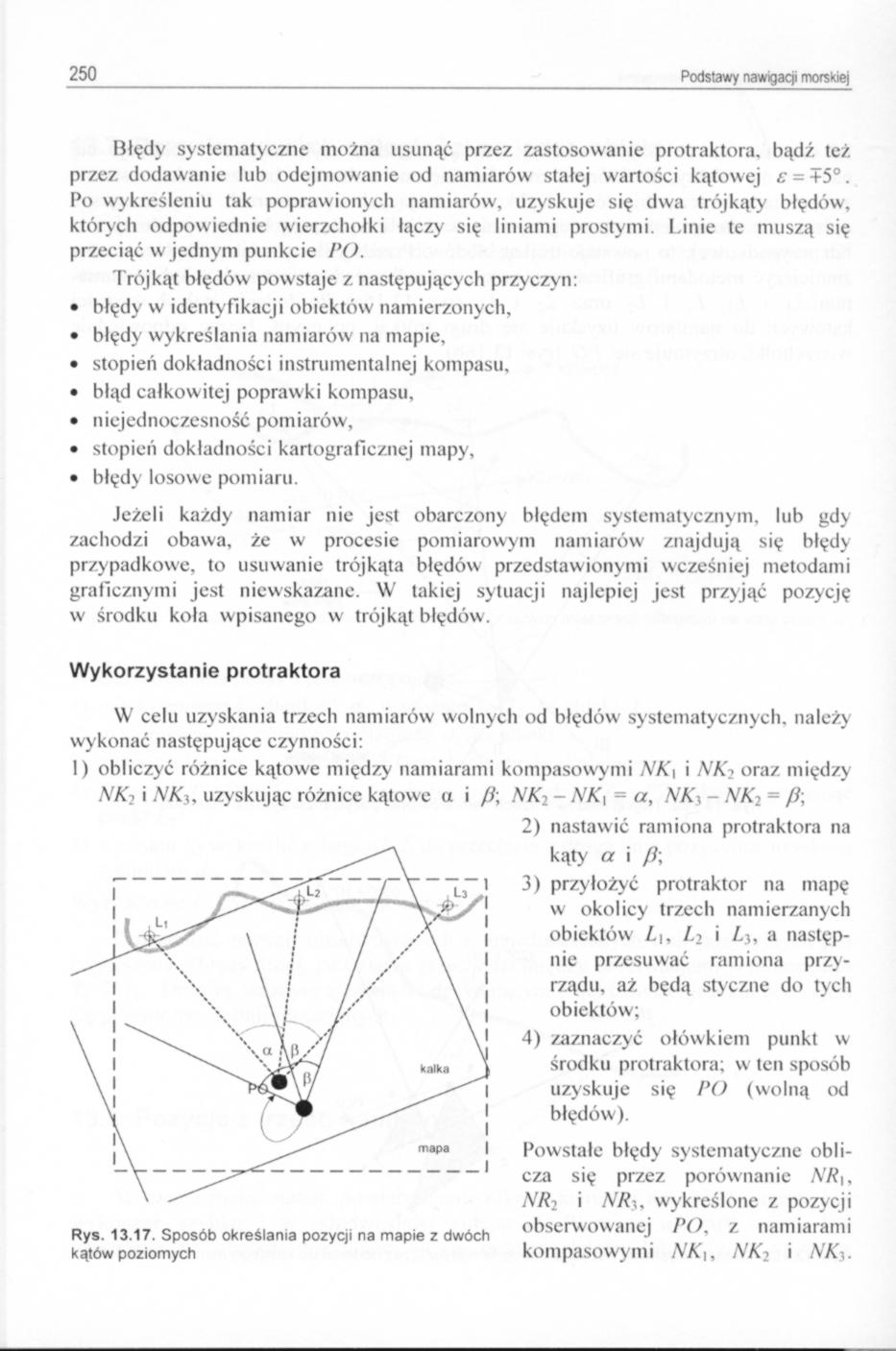
I) obliczyć różnice kątowe między namiarami kompasowymi NK\ i NK-> oraz między NK: i NKy. uzyskując różnice kątowe u i (i\ NKi - NK\ = a, NKy - AfKj = //;

Rys. 13.17. Sposób określania pozycji na mapie z dwóch kątów poziomych
2) nastawić ramiona protraktora na kąty a i /?;
3) przyłożyć protraktor na mapę w okolicy trzech namierzanych obiektów L\, L-> i Ly, a następnie przesuwać ramiona przyrządu. aż będą styczne do tych obiektów;
4) zaznaczyć ołówkiem punkt w środku protraktora; w ten sposób uzyskuje się PO (wolną od błędów).
Powstałe błędy systematyczne oblicza się przez porównanie A7?i, A'R2 i NR.. wykreślone z pozycji obserwowanej PO. z namiarami kompasowymi NKt, A'K-> i NK\.
Wyszukiwarka
Podobne podstrony:
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
252 (15) 252 Podstawy nawigaqi morskiej Dobre wyniki dokładności pozycji można uzyskać, gdy trzy obi
254 (15) 254 Podstawy nawigaqi morskiej Można wymienić wiele innych możliwości określania pozycji w
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
więcej podobnych podstron