291 Blender kompedium
580 Btender. Kompendium
Pierwsza z nicii, domyślnie wleczona przyciskiem Use Goal, polega na przypięciu wirtualnymi pinezkami wybranej grupy wierzchołków (Vcrta Group, o sposobie ich tworzenia szerzej w rozdziale osiemnastym, poświęconym budowaniu kośćca modelu) bądź wszystkich jednocześnie, uniemożliwiając deformację uzyskanego tak kształtu Goal. W ostatnim przypadku regulacja siły owego przypięcia dokonuje się poprzez wprowadzenie odpowiedniej wartości parametru Goal, gdzie 1.000 oznacza brak efektu Soft Body. absolutne zachowanie formy „przypiętego" parametru Goal i podatność bryły na animację m.in. z poziomu krzywych IPO. podczas gdy 0.000 — jej maksymalną wrażliwość wyłącznie na zjawiska fizyczne. Wybór liczby pomiędzy owymi skrajnościami pozwala nam ustalić adekwatny do naszych potrzeb kompromis (rysunek 15.48).
|
J |
L JL |
|
I |
* , 1 , |
Rysunek 15.48. Obiekt Cube przelatujący przez bryłę „rozmiękczoną" efektem Piane Soft Rody w kierunku wyznaczonym przez strzałkę, wartość parametru Coal wynosiła odpowiednio 0.000 (ilustracja I.), 0.500 (ilustracja 2.) i 1.000 (ilustracja 3.)
Wykorzystanie grupy wierzchołków do regulacji parametru Goal odbywa się przez ich wskazanie z rozsuwanego menu obok przycisku Use Goal (rysunek 15.49).

Rysunek 15.49.
Wybór odpowiedniej grupy wierzchołków jako parametru Coal dla efektu Soft Rody
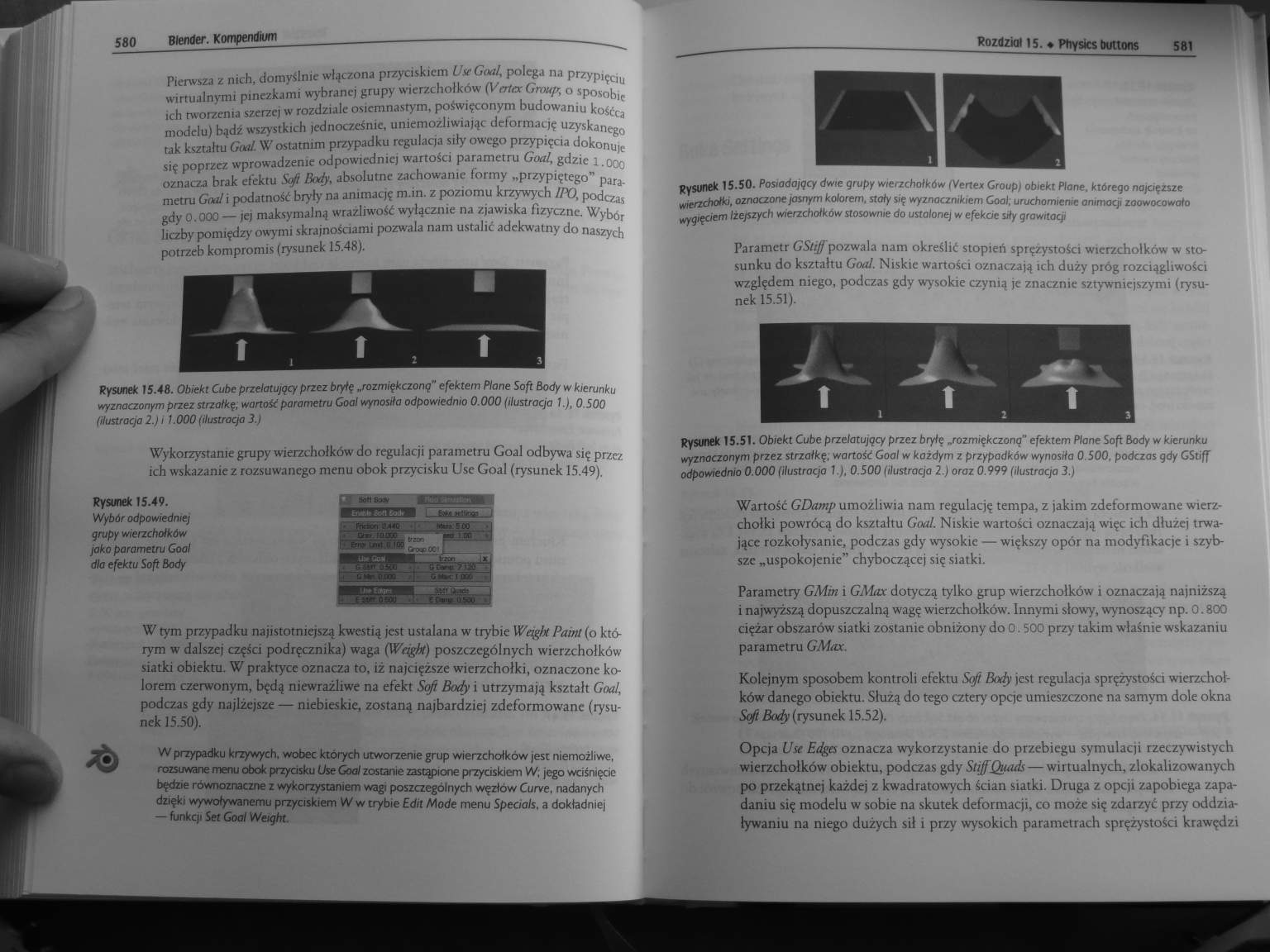
W tym przypadku najistotniejszą kwestią jest ustalana w trybie Wa&ht Parnt (o którym w dalszej części podręcznika) waga (Wetghł) poszczególnych wierzchołków siatki obiektu. W praktyce oznacza to, iż najcięższe wierzchołki, oznaczone kolorem czerwonym, będą niewrażliwe na efekt Soft Body i utrzymają kształt Goal. podczas gdy najlżejsze — niebieskie, zostaną najbardziej zdeformowane (rysunek 15.50).

W przypadku krzywych, wobec których utworzenie grup wierzchołków |est niemożliwe, rozsuwane menu obok przycisku Use Goal zostanie zastąpione przyciskiem W, jego wciśnięcie będzie równoznaczne z wykorzystaniem wagi poszczególnych węzłów Curve, nadanych dzięki wywoływanemu przyciskiem W w trybie Edit Modę menu Specials. a dokładniej — funkcp Ser Coal Weight.
RozdzkH 15. » Pttysłcs bultons
581
Rysunek 15.50. Posiadający dwie grupy wierzchołków (Vertex Group/ obiekt Piane, którego napęzsze wierzchołki, oznaczone lasnym kolorem, stały się wyznacznikiem Coal; uruchomienie animacji zoowocowato wygięciem lżejszych wierzchołków stosownie do ustalonej w efekcie siły grawitacji
Faramctr GSłtff pozwala nam określić stopień sprężystości wierzchołków w stosunku do kształtu Goal. Niskie wartości oznaczają ich duży próg rozciągliwości względem niego, podczas gdy wysokie czynią je znacznie sztywniejszymi (rysunek 15.51).

Rysunek 15.51. Obiekt Cube przelatujący przez bryłę ,rozmiękczoną" efektem Piane Soft Rody w kierunku wyznaczonym przez strzałkę, wartość Coal w każdym z przypadków wynosHa 0.500, podczas gdy GStiff odpowiednio 0.000 (ilustracja 1.), 0.500 (ilustracja 2.) oraz 0.999 Iilustracja 3.)
Wartość GDamp umożliwia nam regulację tempa, z jakim zdeformowane wierzchołki powrócą do kształtu Goal. Niskie wartości oznaczają więc ich dłużej trwające rozkołysanie, podczas gdy wysokie — większy opór na modyfikacje i szybsze „uspokojenie” chyboczącej się siatki.
Parametry GMm i GMax dotyczą tylko grup wierzchołków i oznaczają najniższą i najwyższą dopuszczalną wagę wierzchołków. Innymi słowy, wynoszący np. 0.800 ciężar obszarów siatki zostanie obniżony do 0.500 przy takim właśnie wskazaniu parametru GMax.
Kolejnym sposobem kontroli efektu Soji Botly jest regulacja sprężystości wierzchołków danego obiektu. Śluzą do tego cztery opqe umieszczone na samym dole okna Soft Body (rysunek 15.52).
Opcja Use Edfjcs oznacza wykorzystanie do przebiegu symulacji rzeczywistych wierzchołków obiektu, podczas gdy StiffQuads — wirtualnych, zlokalizowanych po przekątnej każdej z kwadratowych ścian siatki. Druga z opqi zapobiega zapadaniu się modelu w sobie na skutek deformacji, co może się zdarzyć przy oddziaływaniu na niego dużych sił i przy wysokich parametrach sprężystości krawędzi
Wyszukiwarka
Podobne podstrony:
351 Blender kompedium 700 Btender. Kompendiom Poza opisanymi już funkcjami, które się w niej kryją,
281 Blender kompedium 560 Btender. Kompendium Rysunek 14.44. Oświetlona wyłącznie techniką AO oraz&n
287 Blender kompedium 572 Btender. Kompendium Parametr NormaI nadaje cząsteczkom początkową prędkość
288 Blender kompedium 574 Btender. Kompendium Kolejne p.ir.unctry X, Yom Z. umiesz
294 Blender kompedium 586 Btender. Kompendium ♦ Fluid — czyni z aktywnej bryły cie
319 Blender kompedium 636 Btender. Kompendium Skasowanie okreśionei trnwi bądź kla
424 Blender kompedium 846 Btender. Kompendium Bevcl Depth, 75 BevOb. 155, J56 Beztcr. 30, 73 Be
432 Blender kompedium 862 Btender. Kompendium 862 Btender. Kompendium Radiosity Emit, 535 etapy
338 Blender kompedium 674 Btender. Kompendium interesujących nas animacji. Cały proces powinien jesz
347 Blender kompedium 692 Btender. Kompendium sposoby ukazania modelu w strefie )D Virw, takie jak W
348 Blender kompedium 694 Btender. Kompendium nazwę zaznaczonej podczas malowania kości, jej porusze
390 Blender kompedium 778 Btender. Kompendiom 778 Btender. Kompendiom art^Nfy. ( Cpwr wina Mu
392 Blender kompedium 782 Btender. Kompendium Rysunek 22.1. Strefa Video Sequence Editor. dostępna z
245 Blender kompedium 488 Btender. Kompendium Blendcr pozwala na dowolne przemiesz
254 Blender kompedium 506 Btender. Kompendium Rysunek 12.51. Sceno oświetlona jednorodnie lampą
255 Blender kompedium 508 Btender. Kompendium Rysunek 12.55. Przemytlano kompozycja obrazu jest
268 Blender kompedium 534 Btender. Kompendium (Patch) umieszczony zostaje obiekt; chociaż rozmiary o
275 Blender kompedium 548 8lender. Kompendium drobny retusz w przypadku powstania
289 Blender kompedium 576 BIender. Kompendium 576 BIender. Kompe
więcej podobnych podstron