392 (7)
392 Podstawy nawigacji morskiej
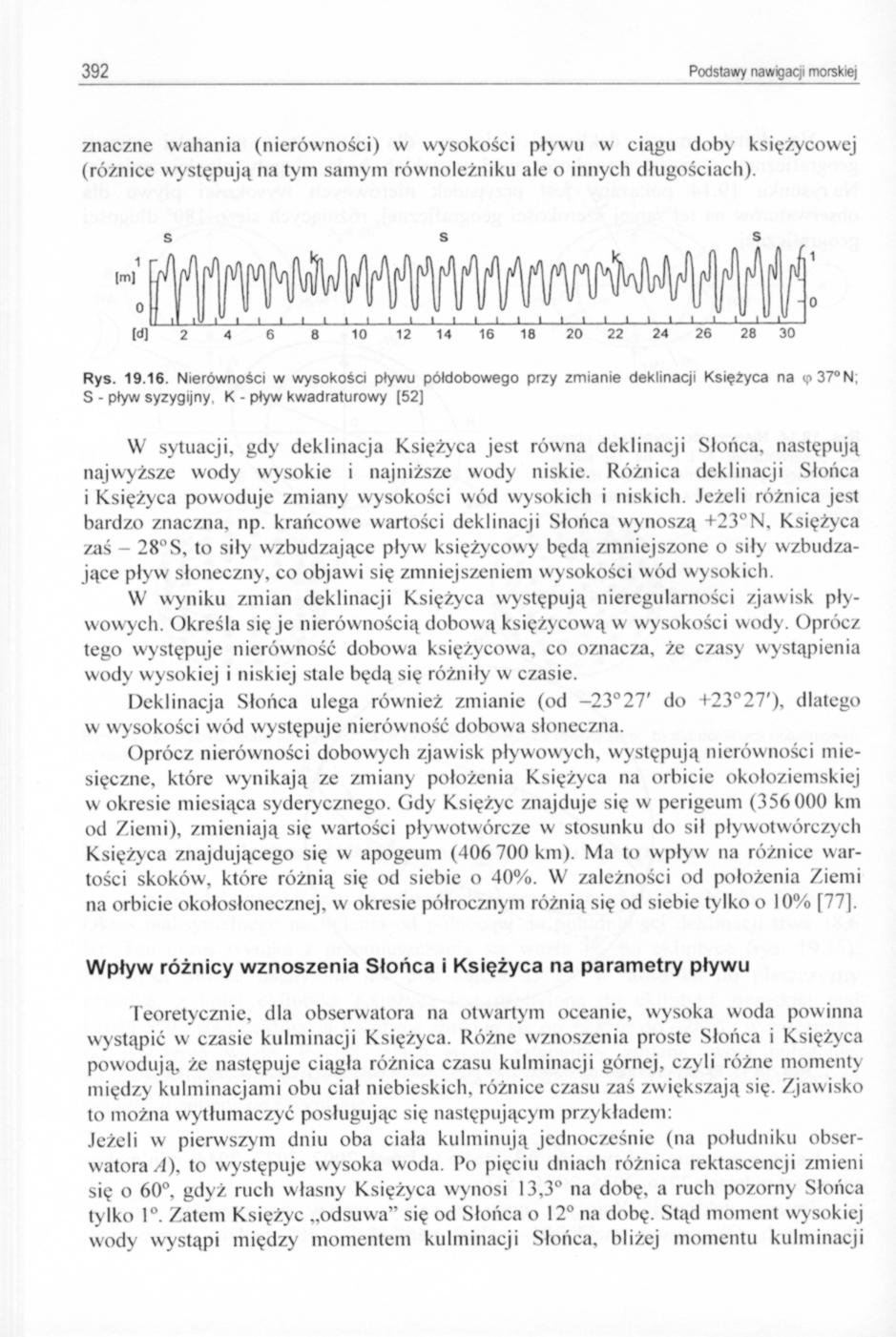
znaczne wahania (nierówności) w wysokości pływu w ciągu doby księżycowej (różnice występują na tym samym równoleżniku ale o innych długościach).
392 Podstawy nawigacji morskiej
s s s

[d] 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
Rys. 19.16. Nierówności w wysokości ptywu półdobowego przy zmianie deklinacji Księżyca na <p 37° N S - pływ syzygijny. K - pływ kwadraturowy [52]
W sytuacji, gdy deklinacja Księżyca jest równa deklinacji Słońca, następują najwyższe wody wysokie i najniższe wody niskie. Różnica deklinacji Słońca i Księżyca powoduje zmiany wysokości wód wysokich i niskich. Jeżeli różnica jest bardzo znaczna, np. krańcowe wartości deklinacji Słońca wynoszą +23°N. Księżyca zaś - 28"S, to siły wzbudzające pływ księżycowy będą zmniejszone o siły wzbudzające pływ słoneczny, co objawi się zmniejszeniem wysokości wód wysokich.
W wyniku zmian deklinacji Księżyca występują nieregularności zjawisk pływowych. Określa się je nierównością dobową księżycową w wysokości wody. Oprócz tego występuje nierówność dobowa księżycowa, co oznacza, że czasy wystąpienia wody wysokiej i niskiej stale będą się różniły w czasie.
Deklinacja Słońca ulega również zmianie (od -23°27' do +23°27'), dlatego w wysokości wód występuje nierówność dobowa słoneczna.
Oprócz nierówności dobowych zjawisk pływowych, występują nierówności miesięczne, które wynikają ze zmiany położenia Księżyca na orbicie okołoziemskiej w okresie miesiąca syderycznego. Gdy Księżyc znajduje się w perigeum (356 000 km od Ziemi), zmieniają się wartości pływotwórcze w stosunku do sił pływotwórczych Księżyca znajdującego się w apogeum (406 700 km). Ma to wpływ na różnice wartości skoków, które różnią się od siebie o 40%. W zależności od położenia Ziemi na orbicie okołosłoncczncj, w okresie półrocznym różnią się od siebie tylko o I0% [77],
Wpływ różnicy wznoszenia Słońca i Księżyca na parametry pływu
Teoretycznie, dla obserwatora na otwartym oceanie, wysoka woda powinna wystąpić w czasie kulminacji Księżyca. Różne wznoszenia proste Słońca i Księżyca powodują, że następuje ciągła różnica czasu kulminacji górnej, czyli różne momenty między kulminacjami obu ciał niebieskich, różnice czasu zaś zwiększają się. Zjawisko to można wytłumaczyć posługując się następującym przykładem:
Jeżeli w pierwszym dniu oba ciała kulminują jednocześnie (na południku obserwatora A), to występuje wysoka woda. Po pięciu dniach różnica rektascencji zmieni się o 60°. gdyż ruch własny Księżyca wynosi 13,3° na dobę. a ruch pozorny Słońca tylko 1°. Zatem Księżyc „odsuwa” się od Słońca o 12° na dobę. Stąd moment wysokiej wody wystąpi między momentem kulminacji Słońca, bliżej momentu kulminacji
Wyszukiwarka
Podobne podstrony:
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
312 (12) 312 Podstawy nawigacji morskiej • szerokości charakterystyki anteny, •
314 (11) 314 Podstawy nawigacji morskiej 314 Podstawy nawigacji morskiej T T» zanurzenie statyczne R
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
więcej podobnych podstron