51 (131)
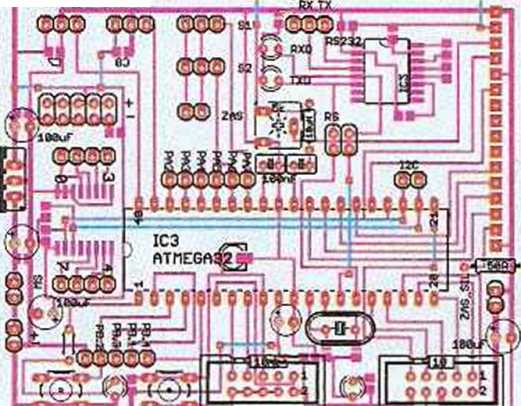
Rys. 3 Skala 50%


Rys. 2
=>
CO

Do czego to służy?
Niniejszy artykuł prezentuje budowę krok po kroku prostego robota mobilnego. Chyba każdy kiedyś marzył o zbudowaniu konstrukcji, która by wyręczała go przy obowiązkach domowych, ale takie zadanie niestety jest zbyt trudne. Przedstawiany projekt to prosty robot dla hobbysty, chcącego rozwijać swoje umiejętności w dziedzinie mobilnej robotyki amatorskiej. Uważam, że jest to swego rodzaju zestaw uruchomieniowy dla prostego robota mobilnego.
W
Jak to działa?
Przy projektowaniu układu moim głównym założeniem było stworzeniem uniwersalnej, nieskomplikowanej elektroniki dla robota. Jej uniwersalność miała polegać na łatwej rozbudowie i na prostym dostosowywaniu do nowej mechaniki (silniki, nowe elementy wykonawcze itd.). Główna funkcjonalność skupiona jest na pierwszej z dwóch płytek. Jej schemat widoczny jest na rysunku 1. Centralnym elementem jest mikroprocesor AVR Atmegaló, który połączony jest z układem MAX232 oraz ekspander portów sterowany przez I2C PIC8574T. Oprócz wyżej wymienionych trzech układów można znaleźć jeszcze wyświetlacz LCD 2x16 znaków, blok zasilania, kilka kontrolek oraz masę złączy służących do rozbudowy. Całość miała być zasilana z pakietu li-pol 7,4V, więc zastosowałem stabilizator L7805 oraz kilka kondensatorów, które filtrują stabilizowane napięcie, znajdują się one zarówno przed i za stabilizatorem. Nie należy z nich rezygnować, gdyż mogą nastąpić problemy podczas zasilania silników z tego samego źródła zasilania, co elektronika. Tak jak było już wspomniane, głównym układem jest ATmegal 6 z wyprowadzonym przyciskiem do resetu, złączem 1SP oraz kwarcem. Prócz tych podstawowych elementów, na płytce można znaleźć następujące złącza: 2x5 pin - uniwersalna linia zasilania 5V, 2x5 pin - złącze do sterownika silników, 1 x3 pin - RS232, 1x3 pin - do podłączenia serwomechanizmów (2 sztuki), 1x2 pin - zasilanie serwomechanizmów, 1x4 pin - wyjścia ekspandera portów (2 sztuki), 1x16 pin - wyświetlacz LCD 2x16 znaków zgodny ze sterownikiem HD44780, 1x3 pin - czujnikach Sharp np.:
GP2Y0A02Y
(2 sztuki), 2x2 pin - miejsce dla zworki łączącej interfejs RS232 z układem max232, 1x2 pin - I2C, 1x2 - zasilanie silników sterownych przez osobny moduł, 1x6 pin - porty I/O (ADC), 1x2 pin - złącze zasilania całości, 1x2 pin złącze dla przełącznika. Druga płytka to sterownik silników. Jego
o
O
o
o O
*WBM. SWg
S.P92 ero.
AUR_ISP FCt£C H-BBIuSE- 1- -
O
O o

Elektronika dla Wszystkich Styczeń 2010 51
Wyszukiwarka
Podobne podstrony:
Pict0202 ■ E^^-^EOOO Rys. 2Do czego to służy? Meteorologia jest niezwykle ciekawą (żeby nie powiedzi
59410 Image227 (4) LF vTPONIKA Rys. 1Do czego to służy? Różnego rodzaju sterowniki oświetlenia były
Image227 (4) LF vTPONIKA Rys. 1Do czego to służy? Różnego rodzaju sterowniki oświetlenia były już op
Image227 (4) LF vTPONIKA Rys. 1Do czego to służy? Różnego rodzaju sterowniki oświetlenia były już op
avt2623 1 Do czego to służy? Chciałbym zaproponować Wam budowę układu, który jest kolejnym remake pr
17754 Image223 (2) Rys. 1 Schemat ideowyDo czego to służy? Elektronika pomaga leniwym i wygodnym. Ch
76494 Image46 (5) Rys. 1 Schemat ideowy zegara W)ŻWf (s>gnnk i5V skie majjDo czego to służy? Prez
Image231 (2) 0,38" (9.65) o.-*3- (10,9) Rys. 1 0,08* (2 03)Do czego to służy? Produkowane przez
83645 Image99 Rys. 2 Schemat Ideowy nadajnika vcc vcc uicDo czego to służy? Każdy z nas wie, jak waż
Image224 Rys. 1 Schemat ideowyDo czego to służy? Opisany poniżej projekt to światło stop sterowane z
Image44 (8) J^LEKTROMKA^UUjJ — Rys. 2 Schemat montażowyDo czego to służy? Wszystkie układy elektroni
więcej podobnych podstron