HPIM0769

3. Budowa robotów przemysłowych
3.2.5. Roboty o strukturze kinematycznej PUMA
Robot PUMA jest specjalnie przeznaczony do realizacji zadań montażowych Na rysunku 3.11 przedstawiono robota montażowego o kinematyce PUMA.
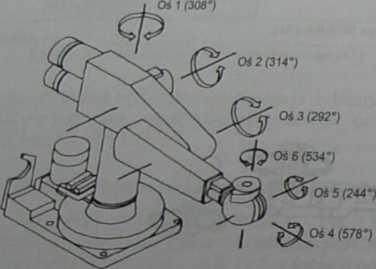
Rysunek 3.11
Robot montażowy PUMA 260 A firmy Staubli Unimation z zaznaczonymi osiami i zakresami ruchów w poszczególnych osiach [KI9]
Jest to robot o sześciu osiach obrotu i udźwigu zaledwie 1 kg, ale jest ro? botem bardzo szybkim. Maksymalne osiągane prędkości (119°/s w osiach / i 2,1 164°/s w osi 3, 577°/s w osi 4, 431°/s w osi 5 i 398°/s w osi 6) rzadko spotyka się w robotach przegubowych, co stawia go wyraźnie przed porównywalnymi rozwiązaniami konkurencyjnymi. Powtarzalność pozycjonowania tego robota wynosi ±0,05 mm [97].
3.2.6. Roboty o strukturze kinematycznej kartezjańskiej
Roboty o strukturze kinematycznej kartezjańskiej mają prostokątny układ osi I współrzędnych i liniowe zespoły ruchu. Nazywane są także robotami bramo- I wymi łub portalowymi. Wśród robotów można wyróżnić:
- roboty bramowe liniowe (rys. 3.12),
— roboty bramowe powierzchniowe o prostopadłościennej przestrzeni ru- I chu (rys. 3.13).
Roboty bramowe o strukturze kinematycznej kartezjańskiej są stosowane I do wykonywania następujących zadań:
- pakowania i paletyzacji,
- obsługi maszyn technologicznych.^Jj
Robot bramowy umowy firmy Fibro"/11—P-----
Rysunek 3.12

cyjny; 1B układ napędu obrotu ramienia /?bowy,n 1H H ■■
mego, 4,5- zabezpieczenia krańcowe <5 7 yEfH przesuwu Pionowego i pozio-żowe, PI prowadnice toczne, 10 - zgarnLz^^0si *1 Z’*~ sanie kizy-
12 - obrotowe |§g prregubowe /IB P™wadnieowe.
’ stojak, 14- łączniki końcowe [97]
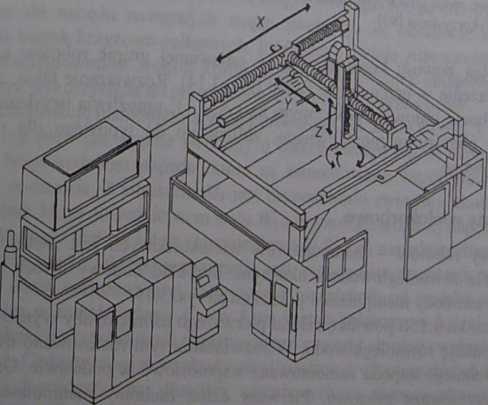
Robot bramowy powierzchniowy [K4]
Rysunek 3.13
i
Wyszukiwarka
Podobne podstrony:
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
P1080180 Spis treści 3.2.5. Roboty o strukturze kinematycznej PUMA
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
więcej podobnych podstron