HPIM0792
;
4. Wprowadzenie do kinematyki robotów
Nal
dalej przykłady będą częściej dotyczyć tej konfiguracji i jej rozszerzeń sunku 4.S pokazano formę geometryczną robota przegubowego.
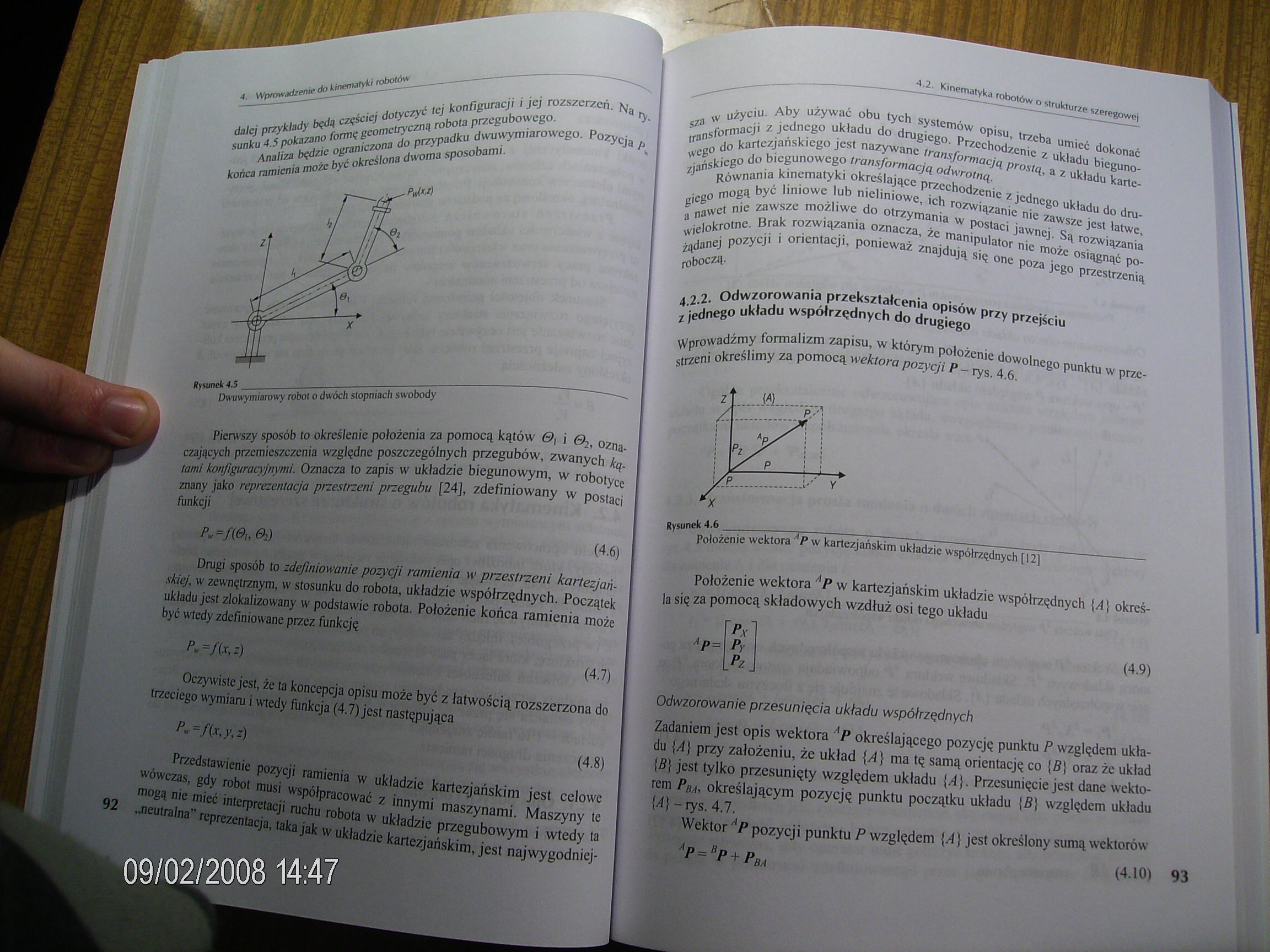
Analiza będzie ograniczona do przypadku dwuwymiarowego. p02yc-końca ramienia może być określona dwoma sposobami.

Rysunek | ;.._______
Dwuwymiarowy robot o dwóch stopniach swobody
Pierwszy sposób to określenie położenia za pomocą kątów <gj i 02, oznaczających przemieszczenia względne poszczególnych przegubów, zwanych kątami konfiguracyjnymi. Oznacza to zapis w układzie biegunowym, w robotyce znany jako reprezentacja przestrzeni przegubu [24], zdefiniowany w postaci funkcji
| - (4.6)
Drugi sposób to zdefiniowanie pozycji ramienia w przestrzeni kartezjań-skiej, w zewnętrznym, w stosunku do robota, układzie współrzędnych. Początek układu jest zlokalizowany w podstawie robota. Położenie końca ramienia może być wtedy zdefiniowane przez funkcję
(4.7)
Oczywiste jest, że ta koncepcja opisu może być z łatwością rozszerzona do trzeciego wymiaru i wtedy funkcja (4.7) jest następująca
*w(w) 1
Przedstawienie pozycji ramienia w układzie kartezjańskim jest celowe wówczas, gdy robot musi współpracować z innymi maszynami. Maszyny te mogą nie mieć interpretacji ruchu robota w układzie przegubowym i wtedy ta 92 „neutralna" reprezentacja, taka jak w układzie kartezjańskim, jest najwygodniej-
sza w użyciu. Aby używać obu tych systemów opisu, trzeba umieć dokonać transformacji z jednego układu do drugiego. Przechodzenie z układu biegunowego do kartezjańskiego jest nazywane transformacją prostą, a z układu karte-zjańskiego do biegunowego transformacją odwrotną.
Równania kinematyki określające przechodzenie z jednego układu do drugiego mogą być liniowe lub nieliniowe, ich rozwiązanie nic zawsze jest łatwe, a nawet nie zawsze możliwe do otrzymania w postaci jawnej. Są rozwiązania wielokrotne. Brak rozwiązania oznacza, że manipulator nie może osiągnąć pożądanej pozycji i orientacji, ponieważ znajdują się one poza jego przestrzenią roboczą.
4.2.2. Odwzorowania przekształcenia opisów przy przejściu z jednego układu współrzędnych do drugiego
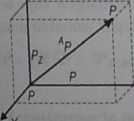
Wprowadźmy formalizm zapisu, w którym położenie dowolnego punktu w przestrzeni określimy za pomocą wektora pozycji P - rys. 4.6.
1 W
X
y
Rysunek 4.6
Położenie wektora AP w kartezjańskim układzie współrzędnych [12]
Położenie wektora AP w kartezjańskim układzie współrzędnych {/!} określa się za pomocą składowych wzdłuż osi tego układu

(4.9)
Odwzorowanie przesunięcia układu współrzędnych
Zadaniem jest opis wektora AP określającego pozycją punktu P wzglądem ukła-
du Igi przy założeniu, że układ {/!} ma tą samą orientacją co {B} oraz że układ H jest tylko przesunięty wzglądem układu {/!}. Przesunięcie jest dane wektorem Pba> określającym pozycją punktu początku układu \B) wzglądem układu S - rys. 4.7.
Wektor AP pozycji punktu P wzglądem {4} jest określony sumą wektorów
(4.10)
aP = bP + Pba
Wyszukiwarka
Podobne podstrony:
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
HPIM0790 4- Wprowadzenie do kinematyki robotów - w przypadku ruchów obrotowych (A, B,C) w kierunku p
HPIM0796 4. Wprowadzenie do kinematyki robotów Wartości /, </>oraz (9 można obliczyć z
HPIM0791 •4. Wprowadzenie do kinematyki robotów Rysunek -v • ■
HPIM0798 wm§ 4. Wprowadzeni* do kinematyki robotów Do wyznaczenia kąta 0 wykorzystuje się twierdzeni
23652 P1080231 4. Wprowadzenie do kinematyki robotów punktu U Rozwiązaniem układu równań będą współr
HPIM0797 4. Wprowmiienle do kinematyki robotów go. Zgodnie z tym, opierając się na współrzędnych pun
HPIM0801 ■ n 4. Wprowadzenie do kinematyki robotów Jak można zauważyć, równanie to ma postać równani
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron