HWScan00205

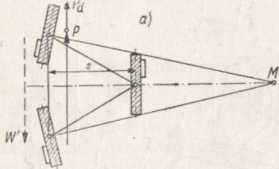
Przykłady zastosowania metody analityczno-wykreślnej. Rozważymy jako przykład niesymetryczny układ z różnymi obciążeniami poszczę-gólnych gąsienic (rys. 5.48) Gąsienice zakreskowane napędzane są z jednakową siłą. Położenie i kierunek wypadkowej siły P obu gąsienic napędzanych są znane. Nie jest natomiast znana jej wielkość. Znana jest również wielkość wypadkowej siły oporów ruchu W, która odpowiada oporom toczenia wszystkich gąsienic W = g -T Gj, oraz jej położenie i kierunek. Ponieważ momenty tarcia Mj są też nieznane, musimy wstępnie ocenić wywołane przez nie przesunięcia uoj sił W] . Przesunięcie to zgodnie z wzorem (5.93) jest mniejsze niż wmax
(5.94)
^ Lf* Wj < U>mMX = -4"
Siła dodatkowa Wd skierowana przeciwnie do dodatkowej siły napędowej Pj, koniecznej do jazdy po krzywiźnie, przechodzi przez punkt obrotu M, co jest niezbędne dla wywołania sił bocznych działających na środki wszystkich gąsienic. Siła ta leży na prostej łączącej ten punkt z punktem przecięcia siły P i przesuniętej siły W'. Punkt przecięcia sił W', Pd i P w przykładzie rys. 5.48 leży w nieskończoności. Wielkość Pd wynika z warunku równowagi z przesuniętym oporem W' i siłą napędową P. Siła Pd rozkłada się na trzy siły NA, NB, Nc. Wielkość sił NA, NB zależna jest od wyboru siły Nc. Według wyznaczonych sił bocznych obliczamy ej i u;; z wzorów (5.91), (5.93).
Wielkości siły Nc musimy tak długo korygować, aż trzy proste równoległe do osi poprzecznej gąsienic i przeprowadzone w odległościach eA, eR, ec przetną się w przesuniętym środku obrotu M\ Ponieważ nawet duża zmiana Nc w małym stopniu oddziałuje na wielkość sił NA> stosunkowo szybko uzyskuje się rozwiązanie. Z przesunięć wA, wB,


Rys. 5.49. Specjalne przypadki układu niesymetrycznego a, b — trzecia gąsienica napędzana, c, d — trzecia gąsienica nienapędzana

otrzymujemy w końcu nowe położenie przesuniętego oporu W . Jeżeli położenie to różni się od obranego poprzednio, obliczenie należy prowadzić, aż do uzyskania zgodności rozwiązań. Podczas tego wypadkowa oporu toczenia W' przesuwa się równolegle, a dodatkowa siła W</ obraca się odpowiednio wokół punktu obrotu M. Oba te ruchy odbywają się jednak

Rys. 5.50. Związki między rzeczywistym a zmniejszonym promieniem
krzywizny
a — przypadek ze zmniejszonym promieniem w układzie niesymetrycznym, b — zależność stosunku promienia rzeczywistego i zmniejszonego do wymiarów podwozia
w małym zakresie. Ponieważ uzyskiwane wartości szybko stają się zbieżne, wystarczy dwu- lub trzykrotne powtórzenie działań.
Z kolei rozważymy przypadek przedstawiony na rys. 5.49 jako jedną z czterech kombinacji, w których obie kierowane gąsienice mogą występować jako zewnętrzne lub jako wewnętrzne. Trzecia gąsienica niestero-Wana może być napędzana (rys. 5.49 a, b), albo nienapędzana (rys.
5.49 c, d). Każdy z tych przypadków ma różny stosunek , który zależy
Wyszukiwarka
Podobne podstrony:
Odporność walidowanei metody analitycznej Odporność metody analitycznej jest wyrażana jako stabilnoś
Przykłady zastosowania metody sił do układania równania ruchu 1. Drgania swobodne tłumione wahadła
IMG?62 (2) (np niniejszych niż 1%, albo jeszcze mniejszych niż 0.1%). Mamy tu kolejny przykład zasto
Przykład zastosowanie metody młynków hydrometrycznych Przekrój osiowy przez hydrozespół z zaznaczony
Rys. 9. Wynik działania m-pliku z Przykładu 9Przykład 10 Przy użyciu tej samej metody możemy wykreśl
209 Zastosowanie metody B2C dla wspomagania procesów...10. B2C jako narzędzie optymalizujące obsługę
Kraków 18.06.2012 Zastosowanie metody LA ICP MS do obrazowania cynku w strukturach mózgu szczura jak
32985 plyta 1 1 ĆWICZENIE 4PŁYTA ZASTOSOWANIE METODY MORY DO OKREŚLANIA PRZEMIESZCZEŃ NA PRZYKŁADZIE
Metoda 6 Kapeluszy Myślowych. Przykład zastosowania metody na lekcji j. polskiego w klasie II
Metoda
Capture�160 16.14. Przykład) zastosowania metody średnich nie ważonych W tabeli 16.7 przedstawiono f
więcej podobnych podstron