604001147
91
Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98)
> awarię na skutek utraty informacji o prędkości obrotowej (kontrolowane zatrzymanie pojazdu),
> przegrzanie silnika lub falownika (obsługa termistora PTC wbudowanego w silnik i termistora osadzonego w radiatorze).
Algorytm sterowania jest oparty' na utrzymywaniu maksymalnego ilorazu momentu elektromagnetycznego i prądu stojana [7], Sprowadza się to do maksymalizacji odjemnej w równaniu (1) opisuj ący'm moment elektromagnetyczny:
(1)
przy założeniu, iż wektor prądu is stojana można przedstawić jako:
(2)
oraz: gdzie: ...d oraz ...q - wartości wosiach d i q wirującym układzie współrzędnych, Wm-strumień magnetyczny stojana, p - liczba par biegunów, L oraz / - indukcyjności oraz prądy odpowiednio.
Schemat blokowy zaimplementowanego algorytmu sterowania został przedstawiony na poniższym rysunku (Rys. 4). Sygnał podawany przez operatora z zadajnika prędkości coK[ razem z wartością prędkości zmierzonej tworzą uchyb regulacji dla regulatora proporcjonalno-calkującego (PI) prędkości. Z wyjścia tego regulatora przez ogranicznik wartość ta oznaczona jako /(Lrcfjest zadaną dla sumatora regulatora momentu. Odpowiadająca jej wartość prądu zmierzonego /q jest jednocześnie po przemnożeniu przez stalą k - wielkością zadaną dla regulatora prądu w osi d wirującego układu współrzędnych. Wartość współczynnika k jest dobrana na podstawie parametrów schematu zastępczego silnika i weryfikowana w warunkach doświadczalnych. Z wyjść regulatorów momentu i prądu w osi d po nałożeniu ograniczników, amplitudy napięć zadanych w układzie dq są transformowane do układu współrzędnych stacjonarnych a(3 przy udziale zmierzonego chwilowego położenia kątowego wirnika & transformowanego na kąt elektryczny 0C. Kąt położenia wirnika 6 przyjmowany do tych obliczeń w algorytmie sterowania silnikiem otrzymywany może być w jeden z trzech sposobów:
y bezpośrednie przepisanie wartości zmiennej kąta z enkodera absolutnego,
> porównanie różnicy pomiędzy wartościami kątów z enkodera inkremental-nego oraz absolutnego, która po przejściu przez filtr dolnoprzepustówy dodawana jest do sygnału inkremental-nego,
> korzystanie wyłącznie z sygnału enkodera inkrementalnego (głównie przydatne dla celów serwisowych).
Silnik IPMSM z uwagi na małą szczelinę powietrzną charakteryzuje się dużą wartością reaktancji w osi podłużnej. Dzięki tej własności możliwe jest osłabienie strumienia magnetycznego w szczelinie powietrznej za pomocą przepływu stojana w osi d uzyskując w ten sposób, przy zachowaniu stałej mocy, pracę silnika z prędkościami większymi od prędkości znamionowej - odwzbudzenie maszyny [8]. W przypadku silników z magnesami trwałymi następuje to przez wytworzenie pola magnetycznego przeciwdziałające polu magnetycznemu wirnika.
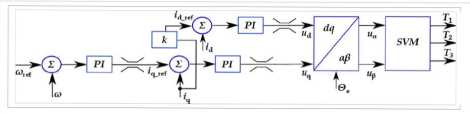
Rys. 4. Schemat blokowy algorytmu sterowania
Wyszukiwarka
Podobne podstrony:
89 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Jarosław Załęski, Michał Dadana, Paweł
90 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) magnetycznej urządzeń „automotive" t
92 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Tabela 1. Wybrane parametry badanego
93 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) 5. Wnioski Układ napędo
116 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) szczenią, zasady pomiaru, wartości odnie
Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) 119 PN-EN 14253+A 1:2011 PN-EN
10 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) ograniczających niekorzystne zjawiska sie
11 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Silnik SAS w otoczeniu infrastruktury tec
12 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 6. Rozruch i praca silnika DC 1120kW
13 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) i ostek, dostępnej energii 30 jednostek,
15 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 16. Rozruch sil. za pomocą Powerboss
16 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) 4>- Obciążenie Moment Napięcie
83 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. IRyszard Pałka, Sebastian Szkolny Katedr
84 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I Zgodnie z zależnością (1): (JE+JL/ń +
85 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I Tabela 1. Porównanie wariantów maszyn
86 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I maksymalnej, czyli 8000 obr/min, warto
87 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I Tabela 2. Porównanie parametrów kart
Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. 1 prowadzenia kompleksowych badań projektow
49 Zeszyty Problemowe - Maszyny Elektryczne Nr 73/2005Zbigniew Szulc, Włodzimierz Koczara Politechni
więcej podobnych podstron